MÉTODO DE CALIBRACIÓN DE UNA MÁQUINA DE CINEMÁTICA PARALELA PORTÁTIL.
Método de calibración de una máquina de cinemática paralela portátil.
El método comprende los pasos de:
a- posicionar unos medios posicionadores (8, 9), que comprenden al menos tres alojamientos (8', 9'), sobre la pieza a mecanizar,
b- posicionar un dispositivito de medida lineal (7) entre cada uno de los alojamientos (8', 9') de los medios posicionadores (8, 9) y un soporte de apoyo (10) de la máquina,
c- aumentar la longitud de una pata (3) de la máquina una pequeña distancia,
d- medir la elongación de cada uno de los dispositivos de medida lineal (7),
e- repetir los pasos c) y d) para todas las patas (3) de la máquina,
f- determinar una posición aproximada de las rótulas fijas (5) de la máquina en base a las medidas obtenidas en el paso e),
g- calcular tos desplazamientos máximos para cada una de las patas (3),
h- aumentar la longitud do una pata (3) de la máquina en la longitud calculada en el paso g),
i- medir la elongación de cada uno de los dispositivos de medida lineal (7),
j- repetir los pasos h) y i) para todas las patas (3) de la máquina,
k- determinación de la posición de las rótulas fijas (5) de la máquina en base a las medidas obtenidas en el paso j).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231186.
Solicitante: FUNDACION TEKNIKER.
Nacionalidad solicitante: España.
Inventor/es: OLARRA URBERUAGA,AITOR, LÓPEZ GARCÍA,Francisco Javier, AZKORBEBEITIA EZENARRO,Urko.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q17/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 17/00 Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00). › para indicar o medir la posición existente o deseada de la herramienta o la pieza de trabajo.
Fragmento de la descripción:
Metodo de calibracion de una maquina de cinematica paralela portatil
CAMPO TECNICO
La presente invencion se engloba dentro del campo de los metodos para la calibracion de maquinas de cinematica paralela y mas concretamente a maquinas de cinematica paralela portables donde dicha maquina se posiciona sobre la pieza a procesar.
ANTECEDENTES DE LA INVENCION
Actualmente el uso de centros de mecanizado de proposito general esta muy extendido, pero tambien existen maquinas especiales, de proposito especifico para la ejecucion de una tarea concreta, por ejemplo operaciones de mantenimiento y reparacion de instalaciones grandes y complicadas (aeroespaciales, energia, barcos) . Actualmente, se estan desarrollando pequefas maquinas portables de proposito general que son capaces de llevar a cabo multitud de operaciones de mecanizado en este tipo de instalaciones . Son maquinas que se llevan a la pieza, en contraposicion del concepto de llevar la pieza a la maquina. De esta manera, permiten economizar enormemente el coste de desmontaje/montaje, manipulacion, mecanizado en grandes centros de mecanizado.
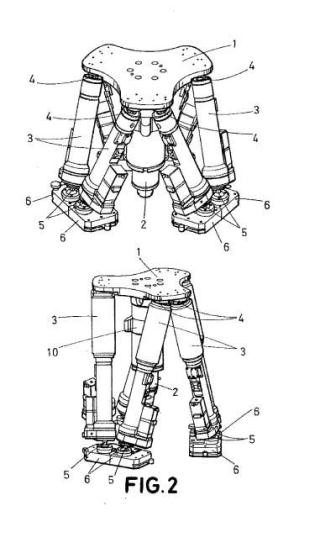
Una maquina de este tipo se describe en la patente US2011/0194906A1. Se trata de una configuracion de cinematica paralela, similar a una plataforma Stewart-Gough (es decir, una plataforma o soporte movil que porta la herramienta y una serie de patas unidas por un extremo a la plataforma movil mediante rotulas moviles y por el otro a una base fija mediante rotulas fijas) , en la que se ha eliminado completamente la base o plataforma fija. De esta manera, cada pata de la maquina puede situarse de manera individual sobre la superficie de piezas de geometria libre. Las patas se fijan sobre el pieza, por ejemplo, mediante imanes. Esta configuracion se denominara hexapodo portable en adelante.
Como cualquier maquina que deba generar una determinada geometria en una pieza por medio de algun proceso, por ejemplo el fresado, la maquina portable debe tener la capacidad de posicionarse con buena precision sobre la pieza a procesar.
El posicionamiento de la herramienta en una maquina de cinematica paralela depende de varios parametros geometricos. A continuacion se enumeran estos parametros para el caso de una plataforma tipo Stewart-Gough: La posicion de las rotulas fijas, la longitud de cada uno de los brazos, la posicion de las rotulas moviles en la plataforma movil y la posicion de la herramienta sobre dicha plataforma movil.
En el caso del hexapodo portable descrito, se proporciona mayor versatilidad para su uso dejando libres las rotulas fijas (eliminado la base fija) , con objeto de adaptarse a las posibilidades que la pieza a procesar ofrece. Esta libertad en cambio exige que una vez el hexapodo se ha atado sobre la pieza (a traves de las rotulas fijas) , se deben identificar la posicion de dichas rotulas fijas. Es suficiente con conocer la posicion relativa de las rotulas entre si. Tras determinar las posiciones de las rotulas fijas, el hexapodo puede posicionarse con precision y generar trayectorias arbitrarias tales como lineas, circulos o espirales.
En el caso de un hexapodo 'normal' las posiciones de las rotulas fijas, las rotulas moviles y la herramienta sobre la plataforma movil suelen ser parametros 'constantes'. Para llevar a cabo movimientos con precision, dichos parametros se suelen identificar por medio de una calibracion. Generalmente la calibracion se utiliza para determinar todos los parametros geometricos enumerados anteriormente.
En contraste con estas metodologias, para habilitar el movimiento preciso de un hexapodo portable tras el atado es suficiente determinar la posicion relativa de las rotulas fijas, el resto de parametros son conocidos por otros medios. Por ejemplo por calibraciones anteriores, o mediante una medicion directa, que puede ser posible en una Maquina de Medir por Coordenadas, debido a las reducidas dimensiones de la maquina portable.
En cambio, la determinacion de la posicion de dichas rotulas fijas debe ser muy robusta, debido a que la configuracion en la que el usuario decide atar el hexapodo portable puede ser muy variable, en esta posibilidad reside la versatilidad de la maquina. En contraste con esta necesidad, los procedimientos de calibracion de maquinas de cinematica paralela 'normales' suelen estar preparados para determinar unicamente pequefos errores con relacion a un disefo teorico.
Por otra parte, todas las maquinas deben resolver la problematica de conocer su posicion relativa con relacion a la pieza que deben procesar.
En las maquinas convencionales, esta busqueda de referencias se puede hacer utilizando detalles en casi cualquier parte de la pieza, lo que simplifica en cierta manera el centrado de la pieza sobre la maquina.
En cambio una maquina portable unicamente alcanza una pequefa zona de la pieza, la zona en la que debe trabajar. Este hecho dificulta considerablemente la busqueda de referencias a partir de las cuales conocer la posicion de la maquina en relacion a la pieza.
Durante los ultimos afos se han desarrollado diferentes procedimientos de calibracion de maquinas de cinematica paralela. La calibracion requiere siempre de medidas redundantes adicionales a las minimas necesarias para el posicionamiento de la maquina. En ocasiones, las maquinas se han dotado de sistemas de medida redundantes, pero lo mas habitual es utilizar sistemas de medida externos a la maquina.
Como dispositivo de medida externo, se ha utilizado por ejemplo el denominado Double Ball Bar (DBB ) que es un dispositivo de medida lineal provisto de rotulas en ambos extremos y que proporciona la medicion del desplazamiento relativo entre ambos extremos. Las rotulas, normalmente se implementan mediante bolas que rotan en un alojamiento de tres puntos de contacto. La medicion de la distancia puede llevarse a cabo de diferentes maneras, se pueden utilizar LVDTs, reglas lineales o interferometros laser. Un ejemplo de calibracion de una maquina de cinematica parelela usando DBBs se describe en la patente US2006/0254364 A1.
Los procedimientos de calibracion que utilizan el DBB utilizan utiles o piezas que proporcionan alojamientos para uno de los extremos del DBB. La posicion de estos alojamientos suele ser conocida, esto es, se ha medido externamente, por ejemplo en una maquina de medir por coordenadas. Este tipo de utiles, no son apropiados para la aplicacion del hexapodo portable, debido a que condicionan en gran medida las posibilidades de utilizarlo en piezas donde el propio util es complicado de situarse.
Por tanto es necesario desarrollar metodos de calibracion in-situ y toma de referencias en la pieza para hexapodos portables.
DESCRIPCION DE LA INVENCION
La presente invencion se refiere a un metodo de calibracion de una maquina de cinematica paralela portatil que comprende un soporte o plataforma movil que porta una herramienta y una serie de patas unidas por uno de sus extremos al citado soporte movil mediante rotulas moviles y por su otro extremo, mediante rotulas fijas, a unos pies de apoyo que pueden apoyar y fijarse sobre una pieza a mecanizar. El metodo comprende los pasos de:
a-posicionar unos medios posicionadores, que comprenden al menos tres alojamientos, sobre la pieza a mecanizar,
b-posicionar un dispositivo de medida lineal entre cada uno de los alojamientos de los medios posicionadores y un soporte de apoyo de la maquina,
c- aumentar la longitud de una pata de la maquina una distancia en la cual no se producen colisiones entre elementos moviles de la maquina y entre la maquina y la pieza (esta distancia es una distancia muy pequefa respecto del recorrido maximo de las patas y puede ser por ejemplo 1mm o inferior dependiendo del tamafo de la maquina) ,
d-medir la elongacion de cada uno de los dispositivos de medida lineal,
e- repetir las operaciones c) y d) para todas las patas de la maquina,
f-determinar una posicion aproximada de las rotulas fijas de la maquina en base a las medidas obtenidas en el paso e) ,
g-calcular los desplazamientos maximos para cada una de las patas (estos desplazamientos estan limitados por interferencias entre los DBB y las patas o la plataforma movil, limites de desplazamiento de los DBB, limites de desplazamiento de las patas de la maquina, limites de los recorridos angulares de las rotulas de la maquina) ,
h- aumentar la longitud de una pata de la maquina en la longitud calculada en el paso g) ,
i- medir la elongacion de cada uno de los dispositivos de medida lineal,
j- repetir los pasos h) y i) para todas las patas de la maquina,
k- determinar la posicion de las rotulas fijas de la maquina en base a las medidas obtenidas en el paso j) .
Los pasos c) , d) , e) y f) son necesarios para poder...
Reivindicaciones:
1. Metodo de calibracion de una maquina de cinematica paralela portatil que comprende un soporte o plataforma movil (1) que porta una herramienta (2) y una serie de patas (3) unidas por uno de sus extremos al citado soporte movil (1) mediante rotulas moviles (4) y por su otro extremo, mediante rotulas fijas (5) , a unos pies de apoyo (6) que pueden apoyar y fijarse sobre una pieza a mecanizar, caracterizado porque comprende los pasos de:
a-posicionar unos medios posicionadores (8, 9) , que comprenden al menos tres alojamientos (8', 9'), sobre la pieza a mecanizar,
b-posicionar un dispositivo de medida lineal (7) entre cada uno de los alojamientos (8', 9') de los medios posicionadores (8, 9) y un soporte de apoyo (10) de la maquina,
c-aumentar la longitud de una pata (3) de la maquina una distancia en la cual no se producen colisiones entre elementos moviles de la maquina y entre lla maquina y la pieza,
d-medir la elongacion de cada uno de los dispositivos de medida lineal (7) ,
e- repetir los pasos c) y d) para todas las patas (3) de la maquina,
f- determinar una posicion aproximada de las rotulas fijas (5) de la maquina en base a las medidas obtenidas en el paso e),
g-calcular los desplazamientos maximos para cada una de las patas (3) ,
h- aumentar la longitud de una pata (3) de la maquina en la longitud calculada en el paso g),
i- medir la elongacion de cada uno de los dispositivos de medida lineal (7) ,
j- repetir los pasos h) y i) para todas las patas (3) de la maquina,
k- determinacion de la posicion de las rotulas fijas (5) de la maquina en base a las medidas obtenidas en el paso j) .
2. Metodo de calibracion de una maquina de cinematica paralela portatil segun reivindicacion 1 en el cual el dispositivo de medida lineal (7) comprende un brazo extensible (7') y dos extremos de apoyo (7'') .
3. Metodo de calibracion de una maquina de cinematica paralela portatil segun cualquiera de las reivindicaciones anteriores en el cual el soporte de apoyo (10) de la maquina comprende apoyos para los extremos de apoyo (7'') de los dispositivos de medida lineal (7) de forma que conformen una rotula esferica, siendo conocida la posicion de dichos apoyos respecto de los las rotulas moviles de la maquina.
4. Metodo de calibracion de una maquina de cinematica paralela portatil segun cualquiera de las reivindicaciones anteriores en el cual los medios posicionadores (8, 9) comprenden un util posicionador (8) que puede apoyar sobre la pieza, comprendiendo tres alojamientos (8') para los extremos (7'') de los dispositivos de medida lineal (7) de forma que conformen una rotula esferica, estando los tres alojamientos (8'') dispuestos en el util (8) a distancias conocidas.
5. Metodo de calibracion de una maquina de cinematica paralela portatil segun cualquiera de las reivindicaciones 1 a 3 en el cual los medios posicionadores (8, 9) comprenden cuatro utiles (9) independientes, cada uno de los cuales comprende un alojamiento (9') para un extremo (7'') de un dispositivo de medida lineal (7) de forma que conformen una rotula esferica .
6. Metodo de calibracion de una maquina de cinematica paralela portatil segun cualquiera de las reivindicaciones anteriores que comprende el calculo de la posicion de las rotulas fijas (5) en el sistema de referencia de la pieza a mecanizar.
7. Metodo de calibracion de una maquina de cinematica paralela portatil segun reivindicacion 6 en el cual los medios posicionadores (8, 9) cuentan con elementos de referencia (11, 11', ) para referenciar su posicion respecto de la pieza a mecanizar.
8. Metodo de calibracion de una maquina de cinematica paralela portatil segun cualquiera de las reivindicaciones anteriores en el cual la posicion de las rotulas fijas (5) esta relacionada con la elongacion de cada uno de los dispositivos de medida lineal (º) de acuerdo a la siguiente formula:
}{ dL )
{dBB }= f ({ pMAQ }{ , pBB , }
donde {dBB} es la elongacion de los dispositivos de medida lineal
{dL} es la elongacion de los brazos del hexapodo portablle
{pMAQ} son el conjunto de parametros geometricos de la maquina
{pF} son las posiciones de las rotulas fijas
{pM} son las posiciones de las rotulas moviles
{pBB} es el conjunto de parametros geometricos de los dispositivos de medida lineal
{pAF} son las posiciones de los alojamientos fijos de los dispositivos de medida lineal
{pAM} son las posiciones de los alojamientos moviles de los dispositivos de medida lineal.
9. Metodo de calibracion de una maquina de cinematica paralela portatil segun reivindicacion 8 en el cual la determinacion de a posicion de las rotulas fijas (5) de los pasos f) y k) comprende la determinacion de los valores {pF} de acuerdo al las siguientes ecuaciones:
donde la matriz [BSM], es el Jacobiano de la funcion f anterior en torno a las posiciones en las que se llevan a cabo las medidas con relacion a los parametros a estimar.
Patentes similares o relacionadas:
 Dispositivo de alineación para herramientas de torneado, del 29 de Julio de 2020, de GÜHRING KG: Dispositivo de alineación para disponer sobre una herramienta de torneado, , en particular sobre un vástago de herramienta o una punta […]
Dispositivo de alineación para herramientas de torneado, del 29 de Julio de 2020, de GÜHRING KG: Dispositivo de alineación para disponer sobre una herramienta de torneado, , en particular sobre un vástago de herramienta o una punta […]
Dispositivo de mandril y método, del 18 de Marzo de 2020, de In-Situ Oilfield Services Limited: Un dispositivo de mandril que tiene al menos dos mandíbulas para agarrar un objeto (T), y un mecanismo de ajuste configurado para ajustar el centro rotacional […]
Procedimiento para el mecanizado de los bordes de piezas de trabajo en forma de placa, del 19 de Febrero de 2020, de IMA Schelling Deutschland GmbH: Procedimiento para el mecanizado de los bordes de piezas de trabajo en forma de placa, donde las piezas de trabajo se suministran en un circuito […]
Aparato seguidor del contorno y sistemas y métodos relacionados, del 1 de Enero de 2020, de FLOW INTERNATIONAL CORPORATION: Un conjunto de cardan para una máquina multieje para ayudar al mantenimiento de una relación espacial entre una herramienta de la máquina multieje y una […]
Accesorio de centrado de útiles sobre una máquina de mecanizado, procedimiento de centrado y dispositivo de ayuda para el centrado que incluye tal accesorio, del 20 de Noviembre de 2019, de Wibemo S.A: Accesorio de centrado de un útil (O) o de un husillo porta-útiles sobre un eje de rotación X-X` de un cañón giratorio de una máquina de mecanizado, caracterizado […]
Módulo de mecanización, conjunto de accesorio para módulo de mecanización, y procedimiento de puesta en marcha de un módulo de mecanización, del 9 de Octubre de 2019, de Watch Out SA: Conjunto de accesorios para módulo de mecanización por arrancado de virutas, que comprende: por lo menos un portaherramientas provisto de una […]
Procedimiento y dispositivo para detectar y corregir una ubicación espacial de una pieza de trabajo sostenida en un dispositivo de posicionamiento, del 4 de Septiembre de 2019, de JENOPTIK AUTOMATISIERUNGSTECHNIK GMBH: Procedimiento para detectar y corregir una ubicación espacial de una pieza de trabajo no simétrica en rotación sostenida en un dispositivo de posicionamiento […]
 Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo, del 31 de Julio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado […]
Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo, del 31 de Julio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado […]