Método y aparato para mejorar la discriminación de ruido usando un factor de atenuación.
Un método para mejorar la discriminación de ruido en un sistema que tiene una pluralidad de sensores (A,
B) que generan cada uno una señal de entrada de sensor representada mediante un vector de entrada que tiene componentes de fase (qA, qB) y de magnitud en respuesta a un estímulo de señal, estando la pluralidad de sensores dispuestos para tener una dirección dentro de eje, comprendiendo el método:
generar un factor de atenuación en función de la diferencia de fase (Dq1) entre dos vectores de entrada, teniendo el factor de atenuación uno de entre múltiples valores, y su valor depende del signo de la diferencia de fase;
combinar los dos vectores de entrada para obtener un vector de salida; y
atenuar el vector de salida mediante el factor de atenuación.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/033220.
Solicitante: DOLBY LABORATORIES LICENSING CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 POTRERO AVENUE SAN FRANCISCO, CA 94103-4813 ESTADOS UNIDOS DE AMERICA.
Inventor/es: TAENZER,JON C, SPICER,BRUCE G.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06F7/38 FISICA. › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › G06F 7/00 Métodos o disposiciones para el procesamiento de datos actuando sobre el orden o el contenido de los datos tratados (circuitos lógicos H03K 19/00). › Métodos o disposiciones para efectuar cálculos utilizando exclusivamente una representación numérica codificada, p. ej. utilizando una representación binaria, ternaria, decimal.
PDF original: ES-2502842_T3.pdf




Fragmento de la descripción:
Método y aparato para mejorar la discriminación de ruido usando un factor de atenuación Campo de la invención
La invención se refiere a la discriminación de ruido en la detección y procesamiento de señales.
Descripción de la técnica relacionada
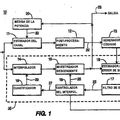
La figura 1 es un diagrama de bloques de un sistema 1 convencional de procesamiento de señal en el dominio de frecuencia en tiempo real que emplea lo que a veces se ha denominado "método de sub-banda de frecuencia" o "método de trama de solapamiento y adición". Este método usa un circuito 11 para dividir la información de señal temporal muestreada entrante en bloques de datos denominados "tramas". Los datos muestreados se pueden proporcionar directamente a partir de un sensor digital o de otro sistema de procesamiento, o se pueden proporcionar a partir de un sensor analógico o sistema de procesamiento a través de un método estándar de conversión de analógico a digital (A/D o ADC) (no mostrado). Las tramas pueden ser adyacentes o estar solapadas. Dado que los datos son muestras de datos de dominio de tiempo, ninguna de las muestras que están dentro de una trama tiene componente imaginario alguno, y los datos son estrictamente "reales." Si lo requiere la aplicación, estas tramas de datos pueden ser después multiplicadas en un circuito 12 de multiplicación por una ventana 14a de análisis para reducir los artefactos que pueden ser introducidos mediante la subsiguiente transformación de los datos de tiempo muestreados en el dominio de frecuencia. Subsiguientemente, las tramas de ventana se transforman al dominio de frecuencia a través de una transformada cualquiera de entre las muchas conocidas por el experto en la técnica, tales como, por ejemplo, la transformada Hartley, la transformada Wavelet, o similares. La más comúnmente usada de estas transformadas es la transformada de Fourier. Dado que los datos se muestrean y digitalizan, se usa en estos casos la DFT o Transformada Discreta de Fourier, existiendo una preferencia por el uso de una de las versiones de cómputo rápido de esta transformada, la conocida como la Transformada Rápida de Fourier o FFT, representada en el circuito 16.
Aunque hay opciones para la ventana de análisis, tal como la ventana Hanning, que reconstruirá la señal de dominio de tiempo con precisión sin la complejidad añadida y el coste computacional de una ventana de síntesis, tales ventanas de análisis adolecen de compromisos de precisión para lograr una eficiencia mejorada. Generalmente, se aplica separadamente una ventana 14b de síntesis mediante multiplicación antes de que la señal sea reconstruida por el circuito 19 de solapamiento y adición (como se muestra en la figura 1) para superar estos compromisos, pero con un coste añadido.
Una vez en el dominio de la frecuencia, los datos están representados por números complejos que contienen tanto una componente "real" como otra "imaginaria". Estos números complejos, uno por cada "depósito" de frecuencia de la transformada, representan la magnitud y el ángulo de fase relativo de los datos temporales de señal de entrada promediados sobre el intervalo de tiempo contenido en la longitud de la trama (y ponderados mediante la función de ventana), así como sobre el rango de frecuencias contenido en el ancho de banda del "depósito". Son estos datos de entrada de transformada los que después se procesan en el circuito 17 mediante un proceso seleccionado para crear una transformada de salida de datos procesados de dominio de frecuencia.
Una vez que se han procesado los datos, el método estándar de dominio de frecuencia requiere después la transformación inversa de cada trama de datos procesada para crear una serie de tramas procesadas de dominio de tiempo de datos "reales". El circuito 18, que indica un proceso de transformada inversa rápida de Fourier (IFFT), realiza este objetivo. Si se usa una ventana 14b de síntesis, se aplica entonces en el circuito 13 mediante multiplicación de la trama de salida de datos de dominio de tiempo con la ventana seleccionada de síntesis: de lo contrario, la trama de salida de datos del circuito 18 se pasa directamente al circuito 19. Alternativamente, la representación de dominio de frecuencia de la ventana de síntesis se puede aplicar a la salida del proceso 17 de señal mediante la convolución de la salida del proceso con la ventana transformada de síntesis antes de realizar la transformada inversa de Fourier en el circuito 18. Las tramas de dominio de tiempo son subsiguientemente reensambladas por el circuito 19 mediante la realización de la concatenación o del solapamiento-y-adición de las tramas de datos procesadas en tiempo real para crear la forma final de onda de señal de salida temporal muestreada y digitalizada que contiene la información de señal procesada. Por supuesto, esta señal muestreada puede ser, y a menudo es, convertida en una señal analógica mediante el uso de un método (no mostrado) estándar de conversión digital a analógico (D/A o DAC), de modo que la señal procesada de salida puede ser usada en infinidad de aplicaciones, tales como la medición científica, telefonía, sistemas de entretenimiento, sistemas de comunicación, y así sucesivamente.
Alternativamente, el proceso se puede aplicar en el dominio de tiempo, en el que, por ejemplo, la señal de entrada, ya sea analógica o digital, se pasa a través de un banco de filtros de discriminación de frecuencia de paso de banda (ya sea analógico o digital, según corresponda). Las salidas de cada uno de los filtros de frecuencia se procesan subsiguientemente, y las señales procesadas se combinan después para formar una señal procesada de salida mediante la adición de las señales procesadas juntas.
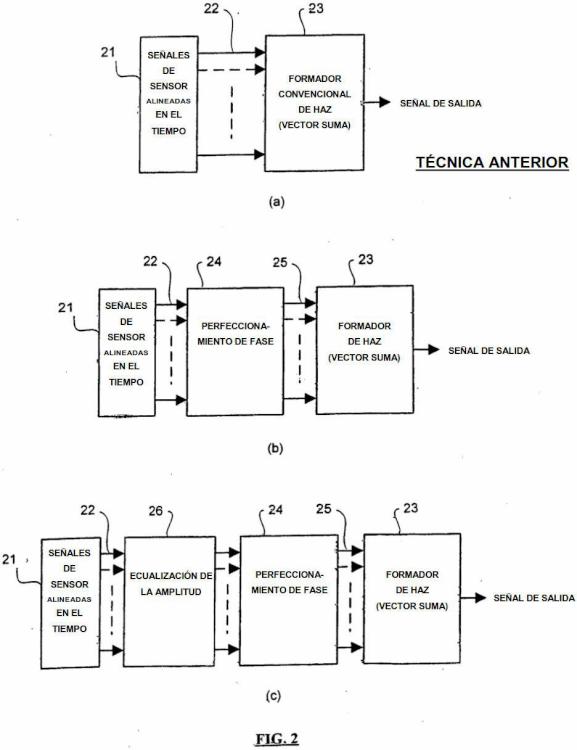
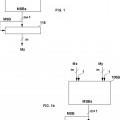
La figura 2(a) muestra los elementos de un sistema convencional de formación de haz de la técnica anterior, en el que un sistema 21 de sensor proporciona dos o más señales 22 de entrada que están alineadas en el tiempo para la señal de interés. Para un mejor rendimiento, estas señales de sensor deberían haber hecho concordar la sensibilidad para todas las señales. Las señales 22 de sensor de entrada proporcionan los datos de entrada para el proceso de formación de haz de suma de vectores del sistema, como se muestra en el circuito 23.
Aunque el proceso 23 de suma vectorial se realiza a menudo como una media vectorial, la media vectorial es simplemente un vector suma dividido por un número escalar, y nos referiremos a él en lo sucesivo, simplemente, como a "vector suma".
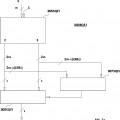
Considérese uno de los sistemas más simples de sensor de formación de haz: la matriz 3 de tipo "broadside" de dos elementos mostrada en la figura 3. Los dos elementos 32 y 34 de sensor de esta matriz están situados en el eje X. Es bien sabido que un sistema tal de formación de haz se puede orientar usando métodos convencionales de retardo de señal. En particular, la orientación convencional del haz se lleva a cabo mediante la variación de fases relativas de las señales de entrada de tal manera que el patrón de señal entrante se refuerza en la dirección deseada y se suprime en las direcciones no deseadas. El cambio de fase es equivalente a un retardo de tiempo -es decir, que el cambio de fase en cada frecuencia es un descentramiento fijado, y que el cambio de fase sobre la frecuencia es lineal-. Sin embargo, por simplicidad, asumimos aquí que la fuente de señal de interés se encuentra en el eje I de sensibilidad de la matriz -es decir, que las dos señales de sensor son adecuadamente retardadas en el tiempo como para que sean alineadas en el tiempo para la señal deseada de interés. Cuando los elementos 32 y 34 de sensor sean omni-direccionales y estén separados por media longitud de onda (18 grados eléctricos), el sistema de formación de haz de tipo "broadside" de dos elementos, como se muestra en la figura 2(a), emitirá una señal que es directamente proporcional al vector suma de las dos señales de elemento de sensor. Esta salida tiene un patrón de haz de sensibilidad que semeja la figura de un ocho -es decir, que tiene dos lóbulos 35 y 36 de sensibilidad como se muestra en la figura 3-, Estos lóbulos son máximos en la dirección dentro de eje, pero son cero en direcciones de ±9° de acimut (en las direcciones del eje X). Éstas son las direcciones en las que la diferencia de fase eléctrica entre las señales del sensor es ±18, y, por tanto, donde las señales se cancelan cuando se suman conjuntamente. Las regiones 37 y 38 de baja sensibilidad resultantes son referidas como "valores nulos".
Mejorar la direccionalidad de un sistema de sensor implica normalmente la reducción de la anchura del lóbulo o lóbulos principal/es de sensibilidad, que en la figura 3 son o bien el lóbulo 35, o el 36 o ambos. En un sistema convencional de formación... [Seguir leyendo]
Reivindicaciones:
1. Un método para mejorar la discriminación de ruido en un sistema que tiene una pluralidad de sensores (A, B) que generan cada uno una señal de entrada de sensor representada mediante un vector de entrada que tiene componentes de fase (a, b) y de magnitud en respuesta a un estímulo de señal, estando la pluralidad de sensores dispuestos para tener una dirección dentro de eje, comprendiendo el método:
generar un factor de atenuación en función de la diferencia de fase (Ai) entre dos vectores de entrada, teniendo el factor de atenuación uno de entre múltiples valores, y su valor depende del signo de la diferencia de fase;
combinar los dos vectores de entrada para obtener un vector de salida; y
atenuar el vector de salida mediante el factor de atenuación.
2. El método de la reivindicación 1, en el que los sensores son micrófonos de audio.
3. El método de la reivindicación 1, que incluye adicionalmente aplicar concordancia de sensibilidad para compensar discordancias de sensibilidad y diferencias de trayectoria de señal de sensor.
4. El método de la reivindicación 3, en el que la concordancia de sensibilidad se basa en una determinación de media matemática seleccionada entre el conjunto de: determinaciones de media aritmética, media geométrica, media armónica y media cuadrática (rms).
5. El método de la reivindicación 3, en el que la concordancia de sensibilidad se usa para obtener vectores primero y segundo concordados, y en el que el factor de atenuación es una función de la magnitud de la relación de la diferencia y la suma de los vectores primero y segundo concordados.
6. El método de la reivindicación 3, en el que la concordancia de sensibilidad se usa para obtener vectores primero y segundo concordados, y en el que el factor de atenuación se obtiene de una tabla de consulta con entradas correspondientes a valores de magnitud de la relación entre la diferencia y la suma de los vectores medios primero y segundo concordados.
7. El método de la reivindicación 1, en el que el factor de atenuación incluye un parámetro ajustable de nitidez.
8. El método de la reivindicación 7, en el que el parámetro ajustable de nitidez es una función de la frecuencia.
9. El método de la reivindicación 7, en el que el parámetro ajustable de nitidez es inversamente proporcional a la frecuencia, de tal manera que se consigue una sensibilidad uniforme a través del espectro de frecuencia.
1. El método de la reivindicación 7, en el que el parámetro ajustable de nitidez tiene uno de entre múltiples valores, y su valor depende del signo de la diferencia de fase.
11. El método de la reivindicación 1, en el que el valor de atenuación oscila dentro de un intervalo de entre cero y uno inclusive, y aumenta hacia uno a medida que se aproxima en una dirección dentro de eje de los sensores.
12. El método de la reivindicación 1, en el que el valor de atenuación oscila dentro de un intervalo de entre cero y uno inclusive, y aumenta hacia uno a medida que se aproxima en una dirección fuera de eje seleccionada a los sensores.
13. El método de la reivindicación 1, en el que el valor de atenuación oscila dentro de un intervalo de entre cero y un valor máximo, y aumenta hacia el valor máximo a medida que se aproxima en una dirección seleccionada a los sensores.
14 El método de la reivindicación 1, en el que la atenuación se ejecuta para valores de diferencia de fase distintos de grados.
15. El método de la reivindicación 1, en el que la atenuación se ejecuta de forma asimétrica sobre una diferencia seleccionada de ángulo de fase sin atenuación.
16. Un método de acuerdo con la reivindicación 1, en el que el factor de atenuación incluye un parámetro ajustable de nitidez, el parámetro ajustable de nitidez tiene uno de entre múltiples valores, y su valor depende del signo de la diferencia de fase.
17. Un método para mejorar la discriminación de ruido de un sistema que tiene una pluralidad de sensores (A, B), que generan cada uno una señal de entrada de sensor representada mediante un vector de entrada que tiene componentes de fase (Aa, Ab) y de magnitud en respuesta a un estímulo de señal, estando la pluralidad de
sensores dispuestos para tener una dirección dentro de eje, comprendiendo el método:
generar un factor de atenuación en función de la diferencia de fase (Ai) entre dos vectores de entrada, siendo la atenuación ejecutada de manera asimétrica sobre una diferencia seleccionada de ángulo de fase sin atenuación;
combinar los dos vectores de entrada para obtener un vector de salida; y
atenuar el vector de salida mediante el factor de atenuación.
18. Un sistema para mejorar la discriminación de ruido en al menos unas señales primera y segunda de entrada (A, B) representadas mediante unos vectores primero y segundo de entrada, teniendo cada uno una componente de fase (a, b) y una componente de magnitud, comprendiendo el sistema:
un primer circuito adaptado para generar un factor de atenuación en función de la diferencia de fase (Ai) entre los vectores primero y segundo de entrada;
un combinador para combinar los vectores primero y segundo de entrada en un vector de salida; y
un circuito de atenuación para atenuar el vector de salida mediante el factor de atenuación, teniendo el factor de atenuación uno de entre múltiples valores, y dependiendo su valor del signo de la diferencia de fase.
19. Un sistema de acuerdo con la reivindicación 18, en el que el factor de atenuación incluye un parámetro ajustable de nitidez, teniendo el parámetro ajustable de nitidez uno de entre múltiples valores, y dependiendo su valor del signo de la diferencia de fase.
2. El sistema de las reivindicaciones 18 o 19, que incluye adicionalmente micrófonos primero y segundo de audio para generar las señales primera y segunda de entrada.
21. El sistema de las reivindicaciones 18 o 19, que incluye adicionalmente un circuito de concordancia de sensibilidad adaptado para compensar discordancias de sensibilidad y diferencias de trayectoria de señal de sensor.
22. El sistema de la reivindicación 21, en el que el circuito de concordancia de sensibilidad aplica una operación de media matemática seleccionada de entre el conjunto de: determinaciones de media aritmética, media geométrica, media armónica y media cuadrática (rms).
23. El sistema de la reivindicación 21, en el que el circuito de concordancia de sensibilidad obtiene los vectores concordados primero y segundo, y en el que el factor de atenuación se obtiene de una tabla de consulta con entradas correspondientes a valores de magnitud de la relación entre la diferencia y la suma de los vectores concordados primero y segundo.
24. El sistema de la reivindicación 21, en el que el circuito de concordancia de sensibilidad obtiene los vectores concordados primero y segundo, y en el que el factor de atenuación es una función de la magnitud de la relación entre la diferencia y la suma de los vectores concordados primero y segundo.
25. El sistema de la reivindicación 18 o 19, en el que el factor de atenuación incluye un parámetro ajustable de nitidez.
26. El sistema de la reivindicación 25, en el que el parámetro ajustable de nitidez es una función de la frecuencia.
27. El sistema de la reivindicación 25, en el que el parámetro ajustable de nitidez es inversamente proporcional a la frecuencia, de tal manera que se consigue una sensibilidad uniforme a través del espectro de frecuencia.
28. El sistema de la reivindicación 19, en el que el factor de atenuación tiene uno de entre múltiples valores, y su valor depende del signo de la diferencia de fase.
29. El sistema de la reivindicación 25, en el que el parámetro ajustable de nitidez tiene uno de entre múltiples valores, y su valor depende del signo de la diferencia de fase.
3. El sistema de la reivindicación 2, en el que el valor de atenuación oscila dentro de un intervalo de entre cero y uno inclusive, y aumenta hacia uno a medida que se aproxima en la dirección dentro de eje a los micrófonos de audio.
31. El sistema de la reivindicación 2, en el que la pluralidad de micrófonos de audio están dispuestos en una matriz de tipo "broadside".
32. El sistema de la reivindicación 2, en el que la pluralidad de micrófonos de audio están dispuestos en una matriz
de tipo "end-fire".
33. El sistema de la reivindicación 2, en el que el valor de atenuación oscila dentro de un intervalo de entre cero y uno inclusive, y aumenta hacia uno en la medida en que se aproxima a una dirección fuera de eje seleccionada a los
micrófonos de audio.
34. El sistema de la reivindicación 2, en el que el valor de atenuación oscila en un intervalo de entre cero y un valor máximo, y aumenta hacia el valor máximo a medida que se aproxima en una dirección seleccionada a los sensores.
Patentes similares o relacionadas:
 Procedimiento de decodificación de imágenes, del 16 de Diciembre de 2015, de HITACHI, LTD.: Procedimiento de decodificación de imágenes de una secuencia de imágenes, que comprende las etapas siguientes:
almacenar una imagen previamente codificada […]
Procedimiento de decodificación de imágenes, del 16 de Diciembre de 2015, de HITACHI, LTD.: Procedimiento de decodificación de imágenes de una secuencia de imágenes, que comprende las etapas siguientes:
almacenar una imagen previamente codificada […]
UNIDADES ARITMÉTICAS Y CONVERSORES ASOCIADOS, del 1 de Octubre de 2015, de UNIVERSIDAD DE MALAGA: Dispositivos para sumar números en coma flotante, dispositivos para multiplicar números en coma flotante, dispositivos para realizar operaciones de multiplicación-suma […]
 Dispositivos coma flotante y conversores, del 29 de Septiembre de 2015, de UNIVERSIDAD DE MALAGA: Dispositivos para convertir números a y desde un formato pre-procesado son propuestos. Un formato en coma fija pre-procesado es un formato en […]
Dispositivos coma flotante y conversores, del 29 de Septiembre de 2015, de UNIVERSIDAD DE MALAGA: Dispositivos para convertir números a y desde un formato pre-procesado son propuestos. Un formato en coma fija pre-procesado es un formato en […]
 Dispositivos para operaciones de multiplicación-suma fusionadas en coma flotante y conversores asociados, del 29 de Septiembre de 2015, de UNIVERSIDAD DE MALAGA: Dispositivos para realizar una operación de multiplicación-suma fusionada en coma flotante entre tres números coma flotante pre-procesados para generar un cuarto número coma […]
Dispositivos para operaciones de multiplicación-suma fusionadas en coma flotante y conversores asociados, del 29 de Septiembre de 2015, de UNIVERSIDAD DE MALAGA: Dispositivos para realizar una operación de multiplicación-suma fusionada en coma flotante entre tres números coma flotante pre-procesados para generar un cuarto número coma […]
 Multiplicadores coma flotante y conversores asociados, del 29 de Septiembre de 2015, de UNIVERSIDAD DE MALAGA: Dispositivos para realizar una multiplicación de al menos dos números coma flotante pre-procesados y generar un tercer número coma flotante pre-procesado son propuestos. Un […]
Multiplicadores coma flotante y conversores asociados, del 29 de Septiembre de 2015, de UNIVERSIDAD DE MALAGA: Dispositivos para realizar una multiplicación de al menos dos números coma flotante pre-procesados y generar un tercer número coma flotante pre-procesado son propuestos. Un […]
 Unidades aritméticas en coma fija y conversores asociados, del 29 de Septiembre de 2015, de UNIVERSIDAD DE MALAGA: Dispositivos para realizar una operación deseada de al menos un primer número en coma fija pre-procesado con N+1 dígitos, para generar al menos un segundo número […]
Unidades aritméticas en coma fija y conversores asociados, del 29 de Septiembre de 2015, de UNIVERSIDAD DE MALAGA: Dispositivos para realizar una operación deseada de al menos un primer número en coma fija pre-procesado con N+1 dígitos, para generar al menos un segundo número […]
 Sumadores coma flotante y conversores, del 29 de Septiembre de 2015, de UNIVERSIDAD DE MALAGA: Dispositivos para realizar una operación deseada de suma o resta de al menos dos números coma flotante pre-procesados y generar un tercer número […]
Sumadores coma flotante y conversores, del 29 de Septiembre de 2015, de UNIVERSIDAD DE MALAGA: Dispositivos para realizar una operación deseada de suma o resta de al menos dos números coma flotante pre-procesados y generar un tercer número […]
 METODO DE INTERPOLADOR OPTIMO Y APARATO PARA EL AJUSTE DE TEMPORIZACION DIGITAL, del 16 de Abril de 2008, de INTERDIGITAL TECHNOLOGY CORPORATION: Un sincronizador de temporización digital de un receptor para la sincronización de temporización de un transmisor en un sistema de comunicaciones […]
METODO DE INTERPOLADOR OPTIMO Y APARATO PARA EL AJUSTE DE TEMPORIZACION DIGITAL, del 16 de Abril de 2008, de INTERDIGITAL TECHNOLOGY CORPORATION: Un sincronizador de temporización digital de un receptor para la sincronización de temporización de un transmisor en un sistema de comunicaciones […]