Aparato y método para medir una pluralidad de altavoces.
Un aparato para medir una pluralidad de altavoces dispuestos en diferentes posiciones,
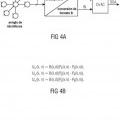
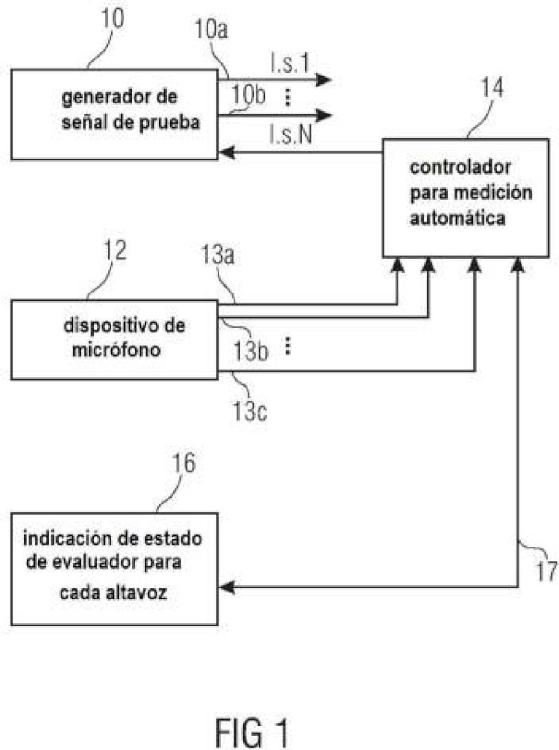
que comprende: un generador (10) de senal de prueba para generar una senal de prueba para un altavoz;
un dispositivo (12) de microfono que esta configurado para recibir una pluralidad de diferentes senales de sonido en respuesta a una o mas senales de altavoz emitidas por un altavoz de la pluralidad de altavoces en respuesta a la senal de prueba;
un controlador (14) para controlar emisiones de las senales de altavoz por la pluralidad de altavoces y para manejar la pluralidad de diferentes senales de sonido, de tal manera que un conjunto de senales de sonido registradas por el dispositivo de microfono estan asociadas con cada altavoz de la pluralidad de altavoces en respuesta a la senal de prueba; y
un evaluador para evaluar el conjunto de senales de sonido para cada altavoz para determinar por lo menos una caracteristica de altavoz para cada altavoz y para indicar un estado de altavoz utilizando la por lo menos una caracteristica de altavoz para el altavoz,
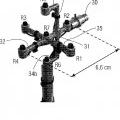
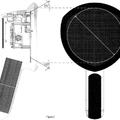
en el que el dispositivo de microfono comprende un arreglo de microfono que comprende tres pares de microfonos dispuestos en tres ejes espaciales;
en el que una senal de presion omnidireccional es derivada por el evaluador (16) al utilizar las senales recibidas por los tres pares o usando un microfono adicional dispuesto en un punto en el cual los tres ejes espaciales se intersectan entre si,
calcular una distancia entre el arreglo de microfonos y un altavoz basandose en una primera longitud de la senal de presion omnidireccional, en el que la primera longitud se extiende desde 0 hasta el momento del maximo de sonido directo de la senal de la presion omnidireccional;
calcular una respuesta de impulso o funcion de transferencia del altavoz utilizando una senal de microfono de un microfono individual de los tres pares, teniendo la senal de microfono una tercera longitud, teniendo la tercera longitud por lo menos un maximo de sonido directo y reflejos prematuros, siendo la tercera longitud mas larga que la primera longitud; y
calcular una direccion de llegada del sonido del altavoz utilizando las senales de todos los microfonos, teniendo las senales una segunda longitud que es mas larga que la primera longitud y mas corta que la tercera longitud, incluyendo la segunda longitud valores de hasta un reflejo prematuro, de tal manera que los reflejos prematuros no estan incluidos en la segunda longitud o estan incluidos en la segunda longitud en un estado atenuado determinado por una porcion lateral de una funcion de ventana.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13197826.
Solicitante: FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V..
Nacionalidad solicitante: Alemania.
Dirección: HANSASTRASSE 27C 80686 MUNCHEN ALEMANIA.
Inventor/es: SILZLE, ANDREAS, DEL GALDO,Giovanni, THIERGART,OLIVER, LANG,MATTHIAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04R1/40 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04R ALTAVOCES, MICROFONOS, CABEZAS DE LECTURA PARA GRAMOFONOS O TRANSDUCTORES ACUSTICOS ELECTROMECANICOS ANALOGOS; APARATOS PARA SORDOS; SISTEMAS PARA ANUNCIOS EN PUBLICO (producción de sonidos cuya frecuencia no está determinada por la frecuencia de alimentación G10K). › H04R 1/00 Detalles de los transductores (membranas H04R 7/00; caracterizado por la naturaleza del transductor, ver el grupo correspondiente de los grupos principales H04R 9/00 - H04R 23/00; montajes adaptados especialmente para equipos telefónicos H04M 1/02). › por combinación de varios transductores idénticos.
- H04R29/00 H04R […] › Dispositivos de monitorización; Dispositivos de ensayo.
- H04R5/027 H04R […] › H04R 5/00 Dispositivos estereofónicos (cabezas de lectura estereofónicas H04R 9/16, H04R 11/12, H04R 17/08, H04R 19/10). › Disposiciones espaciales o estructurales de micrófonos, p. ej. dispositivos que simulan la cabeza humana.
- H04R5/04 H04R 5/00 […] › Circuitos (sistemas estereofónicos H04S).
PDF original: ES-2552930_T3.pdf

Patentes similares o relacionadas:
 Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
SISTEMA Y MÉTODO DE SONIDO ESPECTRAL POSICIONAL, del 30 de Marzo de 2020, de REBOLLO GOMEZ, Joaquin: Se describen un sistema y un método de sonido espectral posicional, capacitados para generar en un entorno una multiplicidad de señales variables en función de la posición y […]
Aparato y procedimiento para la adquisición espacialmente selectiva del sonido mediante triangulación acústica, del 8 de Enero de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Un aparato para capturar sonido desde una ubicación objetivo ubicada en un entorno de grabación, que comprende: un primer formador de haces que […]
Sistemas y métodos para detectar señales acústicas transitorias, del 18 de Octubre de 2019, de University of Mississippi: Un dispositivo informático para procesar señales de ruido de viento y señales acústicas, comprendiendo este dispositivo informático: […]
Reproducción de sonido diferencial, del 9 de Octubre de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Una unidad de cálculo para un sistema de reproducción de sonido, que comprende un arreglo que tiene al menos tres transductores (20a-20e), […]
 Configuración de altavoces, del 26 de Junio de 2019, de Martin Audio Limited: Un método para configurar una agrupación de elementos de altavoz para su uso en un recinto , que comprende
(a) proporcionar una configuración candidata inicial […]
Configuración de altavoces, del 26 de Junio de 2019, de Martin Audio Limited: Un método para configurar una agrupación de elementos de altavoz para su uso en un recinto , que comprende
(a) proporcionar una configuración candidata inicial […]
Una suspensión de disposición de altavoces, del 5 de Junio de 2019, de ALCONS AUDIO B.V.: Una disposición de altavoces adecuada para utilizar tanto en un modo de suspensión de compresión como en un modo de suspensión de vuelo, que comprende al menos […]
Métodos, aparatos y programas informáticos relativos a la modificación de una característica asociada a una señal de audio separada, del 23 de Mayo de 2019, de Nokia Technologies OY: Un método que comprende: determinar, basándose en una medida determinada del éxito de una separación de una señal de audio que representa una fuente sonora de una señal […]