Método de medida para un sensor saturable.
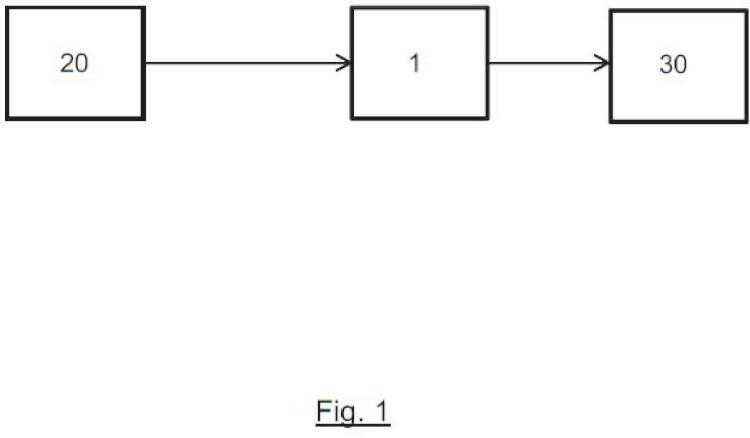
Un método de medida para un sensor saturable (1) que incluye aplicar mediante un generador (20) al sensor (1):
una primera excitación para obtener una primera respuesta y una segunda excitación para obtener una segunda respuesta. La primera excitación lleva al sensor (1) a los límites de su fondo de escala saturándolo. La segunda excitación comprende el estímulo a medir y la primera excitación. Mediante un procesador (30) se calcula una tercera respuesta que comprende comparar la segunda respuesta con respecto a la primera respuesta y analizar la diferencia para determinar la intensidad del estímulo medido. Con esto se consigue reducir notablemente el ruido en la medida. En una siguiente etapa se realiza la normalización de la tercera respuesta con la primera y segunda respuestas. Así es posible eliminar errores de medida por causas ambientales en sensores saturables en general y de sensores AMR en particular.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331925.
Solicitante: INSTITUTO NACIONAL DE TECNICA AEROESPACIAL "ESTEBAN TERRADAS".
Nacionalidad solicitante: España.
Inventor/es: AROCA HERNANDEZ-ROS,CLAUDIO, DIAZ MICHELENA,MARINA, COBOS ARRIBAS,Pedro.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01R33/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01R MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS (indicación de la sintonización de circuitos resonantes H03J 3/12). › Dispositivos o aparatos para la medida de valores magnéticos.
Fragmento de la descripción:
Campo de la invención
La presente invención se engloba dentro del campo de los sensores en general y de los sensores saturables en particular.
Antecedentes de la invención
Los sensores son dispositivos que cuantifican una magnitud física, en adelante estímulo, de manera indirecta mediante la medida de otra magnitud respuesta.
Los sensores presentan dos problemas típicos: por una parte sufren una pérdida de reproducibilidad en la respuesta ante un estímulo cuando se utilizan de forma estática y por otra parte suelen tener una respuesta que es dependiente de las condiciones ambientales. Es decir, la respuesta del sensor ante el estímulo se ve alterada por el hecho de que el sensor trabaje en distintas condiciones de temperatura, humedad, etc.
El primer problema limita la capacidad de los dispositivos para dar medidas relativas y no absolutas ante un estímulo. Es decir, se pueden dar medidas comparativas entre estímulos medidos en las mismas condiciones pero habitualmente existe un error de cero que no permite dar una medida absoluta en referencia a un patrón universal.
El segundo problema obliga a realizar complicadas caracterizaciones de la respuesta en función del estímulo que se pretende medir y de los parámetros que les afectan. Dado que la operación del sensor no siempre tiene lugar en condiciones ambientales en situación de equilibrio, es decir, con valores estacionarios (invariantes en el tiempo) de temperatura, humedad, etc., estas caracterizaciones siempre están sujetas al propio error de falta de estabilidad espacial (gradientes) y temporal de los parámetros.
Esto se complica en el caso de los sensores vectoriales, es decir, sensores que determinan la magnitud, dirección y sentido de una magnitud. En estos dispositivos las variaciones espurias de la magnitud respuesta producidas por los cambios de las condiciones ambientales pueden dar lugar a efectos cruzados (respuestas con una componente perpendicular a la dirección de medida) y confundirse con estímulos en otras direcciones. Esta problemática es general e independiente del tipo de sensor (eléctrico, mecánico, magnético, etc). Así, en los sensores de posición capacitivos, ópticos y optoelectrónicos, se
suele evitar trabajar en condiciones estáticas, y los cambios ambientales pueden variar la magnitud respuesta. En los microscopios de fuerza atómica o magnética se suele trabajar con una excitación alterna de la lengüeta y se trata de controlar el ambiente. En estos dispositivos se pone especial atención con los torques que produzcan deflexiones de la lengüeta en direcciones que no sean la de medida de la fuerza propiamente. También las galgas extensiométricos que se emplean para medir deformaciones de una superficie mediante los cambios de resistencia eléctrica están sujetas a derivas cuando se utilizan de forma estática y el valor de la resistencia puede cambiar por dilataciones y contracciones térmicas del propio sensor en más de una dirección. Incluso existe una tendencia a excitar dinámicamente los sensores de temperatura. Sin embargo, estas técnicas no llevan al sensor al fondo de escala sino que se ciñen a una medición de amplitud modulada y no evitan las caracterizaciones térmicas.
Los sensores magnetométricos en particular (sensores de efecto Hall, sensores inductivos, sensores de magnetorresistencia anisotrópica, colosal, gigante y de válvula de espín, etc) comparten también esta problemática porque su respuesta estática depende de la historia previa y dada la fuerte dependencia de la respuesta de dichos dispositivos con la temperatura. Así por ejemplo, los sensores de magnetorresistencia, que son dispositivos que miden la variación de la resistencia eléctrica de un material cuando se encuentra inmerso en un campo magnético, y que cada vez son más frecuentes en todo tipo de aplicaciones, por su baja masa, potencia disipada y la facilidad de uso, presentan estos dos problemas. Estos sensores tienen un fondo de escala (rango dinámico) típico del orden del campo terrestre, varios cientos de microTeslas - pT (1 pT = 10"6 T), sensibilidades típicas del orden de 1%o/G or 10'2 %o/pT), y campos mínimos detectables del orden de 1 y hasta 0.1 nT (1nT = 10"9 T) [3,4], Sin embargo, su respuesta está limitada por las derivas térmicas debidas a la variación de la resistencia eléctrica con la temperatura (~2.5 %o/°C) y a la variación del efecto magnetorresistivo con la temperatura (que afecta la sensibilidad de los dispositivos: ~2.7 %o/°C, y a su respuesta a campo cero: ± 0.5 %o/°C). Esto les resta competitividad frente a otras tecnologías sensoras para la medida de campos de baja intensidad.
En el estado de la técnica se destacan particularmente las siguientes propuestas que tratan estos problemas.
ALBRETCH, T. R. et al. "Frequency modulation detection using high-Q cantilevers for enhanced forcé microscope sensitivity". (Journal of Applied Physics Volume 69 Issue 2, 1991, page 668) divulga un método de medida para microscopios de fuerza en el que hacen una modulación en frecuencia de la lengüeta.
GONZÁLEZ-GUERRERO M. et al. "Dosimeter for The Two Towers in SEOSATINGENIO Based on the TMP36 Temperature Sensor" IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 60, NO. 4, AUGUST 2013 2461 divulga un método de medida con sensores de temperatura en el que aplica una excitación alterna para obtener una medida de bajo ruido.
POPOVIC et al. "The future of magnetic sensors" (Sensors and Actuators A: Physical Volume 56, Issues 1-2, August 1996, Pages 39-55) divulga un sensor magnético (flux-gate) típico, en el que se excita el núcleo ferromagnético a saturación, induciendo un campo magnético alterno en la dirección de medida, provocando una señal en la bobina de salida cuya transformación al dominio de la frecuencia da lugar a un espectro con sólo armónicos impares. La superposición del campo magnético a medir provoca la aparición de armónicos pares, estableciéndose el valor de la magnitud como función lineal del valor del segundo armónico. En un sensor de tipo fluxgate se satura el nucleo ferromagnético alternativamente. En el caso actual se trata de saturar la magnitud respuesta directamente.
MORAN et al. "Magnetoresistive sensor for weak magnetic fields" (Applied Physics Letters 70, p. 1894; January 1997) divulga la utilización de sensores magnetorresistivos AMR y GMR de forma análoga a un sensor flux-gate en el que se hubiera sustituido el núcleo y la bobina de salida del flux-gate por un sensor MR, manteniendo la bobina de excitación para generar un campo magnético alterno a frecuencia f en la dirección de medida. El sensor así excitado se somete a la influencia del campo magnético a medir y se establece el valor de la medida como función de al menos un valor de alguno de los armónicos de la señal de resistencia de salida, obteniéndose éstos analógicamente utilizando un amplificador "lock- in". En este caso, no se restauran los dominios mediante unos pulsos de campo en la dirección del eje fácil.
US 2010321014 A1 propone la utilización de sensores AMR para la medida de la orientación de campo magnético, sometidos a una doble excitación alternativa o simultánea. Por un lado una excitación de restauración de la dirección de magnetización induciendo un campo magnético alterno (SET/RESET) en la dirección del eje fácil del AMR, a una frecuencia F y, por otro, induciendo un campo magnético en la dirección de medida, perpendicular al eje fácil del AMR, produciendo una modulación del campo a medir. El valor de orientación de campo se obtiene como función de la amplitud o desfase de la señal de salida de la disposición convencional de medida con puente de Wheatstone. En este caso no contempla la medida de la magnitud estímulo a través de otros armónicos emergentes.
US 2005150295 A1 propone un método de medida utilizando un sensor AMR en el que se inducen sucesivamente campos magnéticos en el sensor bajo la influencia del campo
magnético a medir según el ciclo: pulso SET - pulso OFFSET en dirección perpendicular al eje fácil - pulso OFFSET en sentido contrario y se muestrean las salidas de la disposición de medida en puente de Wheatstone tras cada pulso OFFSET, restándose una de otra. Este método no proporciona una restauración de los dominios con un pulso de Reset en sentido contrario.
Descripción de la invención
A la vista de las limitaciones anteriores, sería deseable obtener de un método de medida para sensores que fuera capaz de obtener una respuesta independiente de las condiciones ambientales y únicamente dependiente de la intensidad de la magnitud que se pretende medir.
La presente invención propone un método de medida que palía la falta de reproducibilidad e interferencias...
Reivindicaciones:
1- Método de medida para un sensor saturable (1) que comprende:
- aplicar al sensor (1) una primera excitación para obtener una primera respuesta;
- aplicar al sensor (1) una segunda excitación para obtener una segunda respuesta; caracterizado por que
- la primera excitación es alterna, de amplitud simétrica y ciclo de trabajo conocido, donde dicha amplitud lleva el sensor (1) a los límites de su fondo de escala saturándolo;
- la segunda excitación comprende el estímulo a medir y la primera excitación; donde el método comprende además
- calcular una tercera respuesta que comprende comparar la segunda respuesta con respecto a la primera respuesta y analizar la diferencia para determinar la intensidad del estímulo medido.
2- Método de medida según la reivindicación 1, caracterizado por que comprende además normalizar la tercera respuesta combinando la segunda respuesta en presencia del estímulo con la primera respuesta en ausencia del estímulo dando lugar a una cuarta respuesta.
3- Método de medida según una cualquiera de las reivindicaciones anteriores, donde el ciclo de trabajo es del 50%.
4- Método de medida según una cualquiera de las reivindicaciones anteriores, donde la primera excitación es una señal sinusoidal.
5- Método de medida según una cualquiera de las reivindicaciones anteriores 1 a 3, donde la primera excitación es una señal cuadrada.
6- Método de medida según una cualquiera de las reivindicaciones anteriores 1 a 3, donde la primera excitación es una señal triangular.
7- Método de medida según la reivindicación 4, donde calcular la tercera respuesta comprende un análisis espectral de la segunda respuesta y la primera respuesta para obtener la diferencia de intensidad en los armónicos pares.
8- Método de medida según la reivindicación 2 y 7, donde normalizar comprende dividir la tercera respuesta entre el cociente del primer armónico con y sin estímulo externo.
9- Método de medida según la reivindicación 2 y 7, donde normalizar comprende dividir la tercera respuesta entre una combinación lineal de una pluralidad de cocientes de los armónicos impares de la primera excitación con y sin estímulo externo.
10- Método de medida según una cualquiera de las reivindicaciones anteriores, caracterizado por que, si el sensor (1) es un un sensor vectorial, comprende además realizar una puesta a cero.
11- Método de medida según la reivindicación 10, donde realizar la puesta a cero comprende aplicar una tercera excitación alterna.
12- Método de medida según la reivindicación 10 u 11, donde la primera excitación es paralela a la dirección de medida del estímulo.
13- Método de medida según una cualquiera de las reivindicaciones 10 a 12, donde la frecuencia de la tercera excitación distinta de la primera.
14- Método de medida según la reivindicación 13, donde la frecuencia de la primera excitación es al menos diferente a la frecuencia de la tercera excitación en un factor 10.
15- Método de medida según una cualquiera de las reivindicaciones 10 a 14, donde la dirección de la tercera excitación es perpendicular a la primera.
16- Método de medida según una cualquiera de las reivindicaciones 10 a 15, donde la tercera excitación alterna tiene un desfase respecto de la primera excitación de 90°.
17- Método de medida según las reivindicaciónes 10 a 16, donde normalizar comprende dividir la tercera respuesta entre el cociente de una combinación de armónicos de la primera y la tercera excitación con y sin estímulo externo.
18- Método de medida según las reivindicaciónes 10 a 16, donde normalizar comprende dividir la tercera respuesta entre una combinación lineal de una pluralidad de cocientes de
una combinación de armónicos de la primera y la tercera excitación con y sin estímulo externo.
19- Método de medida según una cualquiera de las reivindicaciones anteriores, donde el 5 sensor (1) es magnetométrico con magnetorresistencia anisótropica y la primera y tercera
excitación es un campo magnético externo.
20- Método de medida según la reivindicación 19, donde la dirección del campo magnético de la primera excitación es perpendicular al eje fácil del sensor (1).
21- Método de medida según la reivindicación 19 o 20, donde la excitación se aplica mediante un generador de campo magnético (20) y la respuesta es calculada mediante un procesador (30).
Patentes similares o relacionadas:
Sistema de detección de presión magnética para una bomba de infusión, del 19 de Febrero de 2020, de ZEVEX, INC.: Una bomba de infusión que puede funcionar para bombear fluido a través de un tubo conectado a la bomba de infusión, en donde la bomba de infusión […]
 Sistema y método para monitorizar una microestructura de un objetivo de metal, del 27 de Noviembre de 2019, de THE UNIVERSITY OF MANCHESTER: Un sistema para monitorizar una microestructura de un objetivo de metal, que comprende:
una pluralidad de sensores (911, 912, 913, ... 91n) electromagnéticos […]
Sistema y método para monitorizar una microestructura de un objetivo de metal, del 27 de Noviembre de 2019, de THE UNIVERSITY OF MANCHESTER: Un sistema para monitorizar una microestructura de un objetivo de metal, que comprende:
una pluralidad de sensores (911, 912, 913, ... 91n) electromagnéticos […]
Procedimiento y dispositivo de determinación de la cantidad de componentes diana marcados magnéticamente, del 20 de Noviembre de 2019, de Siemens Healthcare Nederland B.V: Un procedimiento de determinación de la cantidad de un componente diana en una muestra en el que las partículas magnéticas se enlazan específicamente a […]
Red de magnetómetros vectoriales y procedimiento de localización correspondiente, del 21 de Agosto de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Procedimiento de localización de al menos un magnetómetro vectorial (C1-C3) que pertenece a una red de magnetómetros vectoriales, que comprende […]
INSTRUMENTO PARA FILTRAR ONDAS GEOMAGNÉTICAS, del 17 de Julio de 2019, de WE SELL YOUR HOUSE, S.L: 1. Instrumento para filtrar ondas geomagnéticas que comprende una capa de material flexible que comprende: - una cara interna , y - […]
 Aparato y disposición para la monitorización de una condición de un objeto ferroso alargado que tiene un eje longitudinal, del 27 de Junio de 2019, de KONECRANES GLOBAL CORPORATION: Un aparato para monitorizar una condición de un objeto ferroso alargado que tiene un eje longitudinal, incluyendo el citado aparato al menos un […]
Aparato y disposición para la monitorización de una condición de un objeto ferroso alargado que tiene un eje longitudinal, del 27 de Junio de 2019, de KONECRANES GLOBAL CORPORATION: Un aparato para monitorizar una condición de un objeto ferroso alargado que tiene un eje longitudinal, incluyendo el citado aparato al menos un […]
Detección de proximidad, del 12 de Febrero de 2019, de Wise-sec Ltd: Un procedimiento para detectar una proximidad con respecto a un dispositivo objetivo, que comprende: explorar una banda de frecuencia de red inalámbrica […]
Dispositivo de simulación del movimiento, del 11 de Septiembre de 2018, de Diehl Metering S.A.S: Dispositivo de simulación de movimiento que comprende un captador de rotación y una superficie situada frente al captador de rotación […]