Dispositivo de medición para el registro del ángulo de giro absoluto de un objeto de medición rotatorio.
Dispositivo de medición (9) para el registro del ángulo de giro absoluto (φ
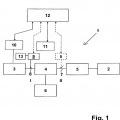
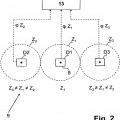
) de un objeto de medición rotatorio, en el que una primera rueda dentada (Z1) está asociada al árbol (8) del objeto de medición, estando engranada la primera rueda dentada (Z1) directa o indirectamente con al menos una segunda rueda dentada (Z2) y una tercera rueda dentada (Z3) y siendo el número de dientes (z1, z2, z3) de cada una de las ruedas dentadas (Z1, Z2, Z3) diferente entre sí, estando asociado a cada rueda dentada (Z1, Z2, Z3) un transductor de ángulo de giro (D1, D2, D3) que registra el ángulo de giro (φZ1, φZ2, φZ3) de la rueda dentada (Z1, Z2, Z3) asociada, estando prevista una unidad de cálculo que determina al menos la diferencia (φZ1 - φZ2) de los ángulos de giro de la segunda rueda dentada (Z2) con respecto a la primera rueda dentada (Z1) y la diferencia (φZ1 - φZ3) de los ángulos de giro de la tercera rueda dentada (Z3) con respecto a la primera rueda dentada (Z1) y mediante una adición (SumDiff ≥ (φZ1 - φZ2) + (φZ1 - φZ3) de las diferencias (φZ1 - φZ2), (φZ1 - φZ3) de los ángulos de giro (φZ1, φZ2, φZ3) determinados de las ruedas dentadas (Z1, Z2, Z3) determina el número entero de vueltas y el ángulo de giro (φZ1) restante del árbol (8) del objeto de medición.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2012/000928.
Solicitante: AUMA RIESTER GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: Aumastr. 1 79379 Müllheim ALEMANIA.
Inventor/es: PLATZER, WILFRIED, HOFMANN,BENJAMIN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que utilizan palancas; que utilizan levas; que utilizan engranajes.
- G01D5/14 G01D 5/00 […] › que influyen en la magnitud de una corriente o voltaje.
PDF original: ES-2550779_T3.pdf
Fragmento de la descripción:
Dispositivo de medición para el registro del ángulo de giro absoluto de un objeto de medición rotatorio La invención se refiere a un dispositivo de medición para el registro del ángulo de giro absoluto de un objeto de medición rotatorio.
Por el documento DE 198 21 467 A1 se ha dado a conocer ya un engranaje diferencial unidimensional, bidimensional o multidimensional para la medición de alta resolución del número entero de vueltas de un árbol. En el caso más sencillo del engranaje diferencial unidimensional se emplean solamente dos ruedas dentadas. Estas se diferencian en cuanto al número de dientes en un diente. Una de las ruedas dentadas se asienta directamente sobre el árbol que va a medirse y acciona la segunda rueda dentada. Mediante la posición angular de las dos ruedas dentadas una respecto a otra puede determinarse el número de vueltas del árbol.
En el documento DE 198 21 467 A1 se presenta además un engranaje diferencial bidimensional con tres ruedas dentadas, estando asociada una primera rueda dentada a su vez al árbol que va a medirse, mientras que las otras dos ruedas dentadas se accionan directa y/o indirectamente por la primera rueda dentada. A través de las combinaciones básicas que se producen para los diferentes números de vueltas de las ruedas dentadas y que son posibles en el caso de números de dientes definidos de las ruedas dentadas individuales se determina el número entero de vueltas. Para alcanzar una claridad en cuanto al número entero de vueltas para los diferentes números de vueltas se calculan los valores fundamentales estandarizados de las combinaciones básicas y se almacenan en un campo numérico bidimensional. En este caso los valores fundamentales estandarizados sirven como coordenadas de memoria mediante las cuales puede determinarse el número entero de vueltas. El inconveniente de la solución conocida puede verse en que la resolución está situada en el intervalo de una vuelta entera. Con la solución conocida no es posible determinar actualmente aparte de eso la posición angular exacta del árbol del objeto de medición.
En relación con los accionamientos del regulador se ha dado a conocer ya un engranaje recto multivuelta de alta resolución para la medición del ángulo de giro absoluto. En el caso del engranaje recto conocido se emplean varias etapas de engranaje acopladas entre sí. En el caso de una solución preferida del engranaje recto multivuelta se emplean 23 ruedas dentadas y cinco transductores de posición. Las etapas de engranaje individuales deben producirse con alta precisión para minimizar los juegos en cada una de las etapas de engranaje dispuestas sucesivamente.
La invención se basa en el objetivo de indicar un dispositivo de medición sencillo y rentable para el registro del ángulo de giro absoluto de un objeto de medición rotatorio.
El objetivo se consigue por que al árbol del objeto de medición está asociada una primera rueda dentada, estando engranada la primera rueda dentada directa o indirectamente con al menos una segunda rueda dentada y una tercera rueda dentada, y siendo el número de dientes de cada una de las ruedas dentadas diferente entre sí. Además, a cada rueda dentada está asociado un transductor de ángulo de giro que registra el ángulo de giro de la rueda dentada asociada, estando prevista una unidad de cálculo que determina al menos la diferencia del ángulo de giro de la primera rueda dentada y de la segunda rueda dentada, y la diferencia del ángulo de giro de la primera rueda dentada y de la tercera rueda dentada, y mediante una adición de las diferencias del ángulo de giro 45 determinado de las ruedas dentadas determina el número entero de vueltas y el ángulo de giro restante del árbol del objeto de medición. Además se considera ventajoso si se realiza una estandarización de la pendiente geométrica de la adición de las diferencias de los ángulos de giro determinados.
El dispositivo de medición de acuerdo con la invención permite la medición de la posición angular actual exacta de un árbol de un objeto de medición en combinación con la evaluación del número entero de del árbol.
El sensor de trayecto diferencial de acuerdo con la invención presenta preferentemente tres ruedas dentadas acopladas entre sí, presentando las ruedas dentadas un número de dientes diferente. Las ruedas dentadas pueden estar configuradas como ruedas cilíndricas de dientes rectos y/o como ruedas dentadas con dentado interior y/o 55 como correas dentadas y/o como ruedas de cadena, y/o como ruedas de fricción. En el caso de las ruedas de fricción la diferencia en el número de dientes no se limita a números enteros positivos. Aquí la diferencia en el número de dientes puede corresponder, hablando en general, a un número real positivo cualquiera mayor igual a 1.
A través del sensor de trayecto diferencial de acuerdo con la invención pueden eliminarse en gran medida los problemas con juegos en las etapas de engranaje. Dado que el número de las etapas de engranaje en el dispositivo de medición de acuerdo con la invención está reducido considerablemente con respecto a la solución conocida el dispositivo de medición de acuerdo con la invención puede realizarse de manera rentable y compacta. Además puede conectarse sin ningún problema con el árbol del objeto de medición rotatorio. En relación con el dispositivo de medición de acuerdo con la invención, se considera como especialmente ventajoso el hecho de que para compensar 65 y para comprobar el funcionamiento del dispositivo de medición, por ejemplo en la producción, es suficiente una vuelta sencilla de las tres ruedas dentadas. Por tanto también puede realizarse un test de funcionamiento del
dispositivo de medición de manera rápida y sin gran esfuerzo.
Una configuración ventajosa del dispositivo de medición de acuerdo con la invención propone que para el registro del ángulo de giro de cada una de las ruedas dentadas se empleen transductores de ángulo de giro ópticos, 5 magnéticos y/o electromagnéticos. A este respecto se manera preferida se emplean sensores Hall.
Como ya se ha descrito en el punto anterior a través de transductores de ángulo de giro correspondientes de todas las ruedas dentadas se registra el ángulo de giro en cada caso en grados. La diferencia del ángulo de giro de la segunda rueda dentada con respecto a la primera rueda dentada y de la tercera rueda dentada con respecto a la primera rueda dentada se utiliza para la determinación del número entero de vueltas del árbol del objeto de medición al que está fijada la primera rueda dentada. A este respecto, preferentemente el número de dientes de las ruedas dentadas se diferencia en un diente, y concretamente de manera que la diferencia del número de dientes de la primera rueda dentada y de la segunda rueda dentada, y de la primera rueda dentada y de la tercera rueda dentada en cada caso es igual a 1. Si por ejemplo la primera rueda dentada está asociada al árbol del objeto de medición y su número de dientes asciende a 25, entonces el número de dientes de la segunda rueda dentada asciende a 26 y el número de dientes de la tercera rueda dentada a 24.
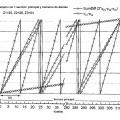
Debido a la diferencia en el número de dientes de la primera rueda dentada con respecto a la segunda rueda dentada, y de la primera rueda dentada con respecto a la tercera rueda dentada, siendo la diferencia igual a dZ y siendo dZ mayor o igual a 1, la resolución de ángulo total del dispositivo de medición se divide en n secciones principales. En este caso n es mayor o igual a 1. La unidad de cálculo determina la sección principal asociada al ángulo absoluto correspondiente por medio de las posiciones relativas de las ruedas dentadas.
Además en relación con el dispositivo de medición de acuerdo con la invención está previsto que la unidad de cálculo determine la resolución multivuelta TurnRes en la determinación del ángulo de giro absoluto utilizando la resolución parcial TA de la siguiente manera, siendo TA la resolución angular de una sección principal:
** (Ver fórmula) **
En este caso TurnRes Nyn N, TA Q y TurnRes TA, siendo TurnRes la resolución multivuelta cuando es n lo más pequeña posible.
Una configuración preferente del dispositivo de medición de acuerdo con la invención prevé que el transductor angular de la rueda dentada que está asociada al árbol del objeto de medición registre directamente el ángulo de giro restante, es decir la resolución de única vuelta. Alternativamente se propone que la unidad de cálculo determine el ángulo de giro restante, es decir la resolución de única vuelta, mediante las posiciones decimales en el cálculo del número entero de vueltas, empleandose para la estandarización de la pendiente... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de medición (9) para el registro del ángulo de giro absoluto () de un objeto de medición rotatorio, en el que una primera rueda dentada (Z1) está asociada al árbol (8) del objeto de medición, estando engranada la primera rueda dentada (Z1) directa o indirectamente con al menos una segunda rueda dentada (Z2) y una tercera rueda dentada (Z3) y siendo el número de dientes (z1, z2, z3) de cada una de las ruedas dentadas (Z1, Z2, Z3) diferente entre sí, estando asociado a cada rueda dentada (Z1, Z2, Z3) un transductor de ángulo de giro (D1, D2, D3) que registra el ángulo de giro (Z1, Z2, Z3) de la rueda dentada (Z1, Z2, Z3) asociada, estando prevista una unidad de cálculo que determina al menos la diferencia (Z1 -Z2) de los ángulos de giro de la segunda rueda dentada (Z2) con respecto a la primera rueda dentada (Z1) y la diferencia (Z1 -Z3) de los ángulos de giro de la tercera rueda dentada (Z3) con respecto a la primera rueda dentada (Z1) y mediante una adición (SumDiff = (Z1 Z2) + (Z1 -Z3) de las diferencias (Z1 -Z2) , (Z1 -Z3) de los ángulos de giro (Z1, Z2, Z3) determinados de las ruedas dentadas (Z1, Z2, Z3) determina el número entero de vueltas y el ángulo de giro (Z1) restante del árbol (8) del objeto de medición.
2. Dispositivo de medición de acuerdo con la reivindicación 1, en el que para el registro de los ángulos de giro (Z1, Z2, Z3) de cada una de las ruedas dentadas (Z1, Z2, Z3) pueden emplearse transductores de ángulo de giro (D1, D2, D3) ópticos, magnéticos y/o electromecánicos.
3. Dispositivo de medición de acuerdo con las reivindicaciones 1 o 2, diferenciándose el número de dientes (z1, z2, z3) de las ruedas dentadas (Z1, Z2, Z3) preferentemente en un diente (dZ = 1) de manera que la diferencia (dZ) del número de dientes (z1 - z2 o z1 -z3) es en cada caso igual a 1.
4. Dispositivo de medición de acuerdo con una o varias de las reivindicaciones anteriores, en el que la unidad de
cálculo (13) determina la resolución multivuelta (TurnRes) para determinar el ángulo de giro absoluto utilizando la resolución parcial (TA) de la manera siguiente:
** (Ver fórmula) **
con TurnRes, n N, TA Q y TurnRes TA, siendo TurnRes la resolución multivuelta cuando n es lo más pequeña posible.
5. Dispositivo de medición de acuerdo con las reivindicaciones 1, 2 o 3, en el que el transductor angular (D1) de la rueda dentada (Z1, Z2, Z3) que está asociada al árbol (8) del objeto de medición registra directamente el ángulo de giro (Z1) restante o en el que la unidad de cálculo (13) determina el ángulo de giro (Z1) restante mediante las posiciones decimales en el cálculo del número entero de vueltas (multivuelta) , empleándose preferentemente la siguiente ecuación:
** (Ver fórmula) **
siendo zHA n y reproduciendo SumDiff la suma de las diferencias de los ángulos de giro z1, z2, z3 de cada una de las ruedas dentadas Z1, Z2, Z3
** (Ver fórmula) **
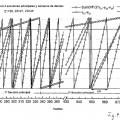
6. Dispositivo de medición de acuerdo con una o varias de las reivindicaciones anteriores, en el que la unidad de cálculo (13) mediante la substracción de los ángulos de giro (Z1, Z2, Z3) determinados de la segunda rueda dentada (Z2) y de la tercera rueda dentada (Z3) divide la resolución angular (TurnRes) del dispositivo de medición (9) en secciones secundarias (UA) , dependiendo el número de las secciones secundarias (UA) del número de 45 dientes (z1) de la primera rueda dentada (Z1) , y siendo la pendiente geométrica de las secciones secundarias (UAi con i = 1, n) mayor que la pendiente geométrica de las secciones principales (HA) .
7. Dispositivo de medición de acuerdo con una o varias de las reivindicaciones anteriores, en el que la unidad de cálculo (13) mediante la substracción (Z1 -Z2, Z1 -Z3) del ángulo de giro determinado de la primera rueda dentada (Z1) y de la segunda rueda dentada (Z2) , o bien de la primera rueda dentada (Z1) y de la tercera rueda dentada (Z3) , divide la resolución angular (TurnRes) del dispositivo de medición (1) en secciones secundarias (UA) , siendo la pendiente geométrica de las secciones secundarias (UA) mayor que la pendiente geométrica de las secciones principales (HA) .
8. Dispositivo de medición de acuerdo con una o varias de las reivindicaciones anteriores, en el que la unidad de cálculo (13) debido a la diferencia (dZ) en el número de dientes de la primera rueda dentada (Z1) con respecto a la segunda rueda dentada (Z2) , y de la primera rueda dentada (Z1) con respecto a la tercera rueda dentada (Z3) , siendo la diferencia igual a dZ, siendo dZ mayor o igual a 1, divide la resolución angular total del dispositivo de 7
medición (9) en n secciones principales (HA) y determinando la unidad de cálculo (13) la sección principal (HAn) correspondiente mediante la posición respectiva (Z1, Z2, Z3 ) de las ruedas dentadas (Z1, Z2, Z3) .
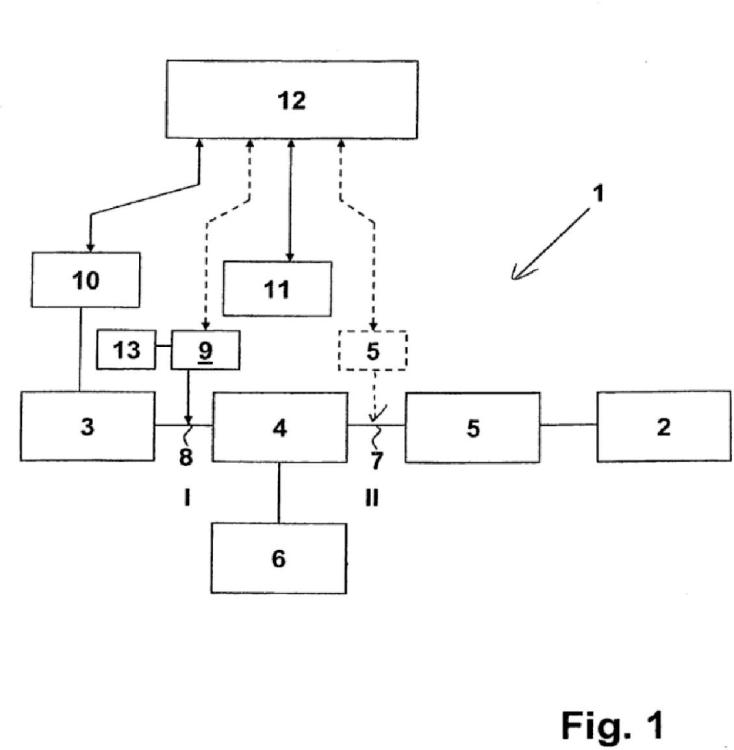
9. Dispositivo de medición de acuerdo con una o varias de las reivindicaciones 1 a 4, en el que en el caso del objeto de medición se trata de un árbol de accionamiento (8) y/o del árbol secundario (7) de un actuador (4) para accionar una grifería (2) , estando conectado el árbol de accionamiento (8) con un elemento de accionamiento (3, 6) , estando la grifería (2) conectada al árbol secundario (7) y estando previsto entre el elemento de accionamiento (3; 6) y la grifería (2) un engranaje reductor (5) .
10. Dispositivo de medición de acuerdo con la reivindicación 9, en el que en el caso del elemento de accionamiento se trata de un electromotor (3) o de una rueda de ajuste (6) .
11. Dispositivo de medición de acuerdo con una o varias de las reivindicaciones anteriores, en el que las ruedas dentadas (Z1, Z2, Z3) están configuradas como ruedas cilíndricas de dientes rectos y/o como ruedas dentadas con 15 dentado interior y/o como correas dentadas y/o como ruedas de cadena y/o como ruedas de fricción.
Patentes similares o relacionadas:
 Sistema y método de calibración de la longitud del trayecto, del 29 de Julio de 2020, de Thermo Electron Scientific Instruments LLC: Aparato para medir una propiedad óptica de una muestra, el aparato que comprende:
a. un brazo oscilante ;
b. una fuente de luz;
c. una primera superficie […]
Sistema y método de calibración de la longitud del trayecto, del 29 de Julio de 2020, de Thermo Electron Scientific Instruments LLC: Aparato para medir una propiedad óptica de una muestra, el aparato que comprende:
a. un brazo oscilante ;
b. una fuente de luz;
c. una primera superficie […]
Procedimiento para el monitoreo del transporte de recipientes de líquidos en un dispositivo de análisis automático, del 15 de Julio de 2020, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Procedimiento para el monitoreo del transporte de un recipiente de líquido con una pinza de sujeción pasiva fijada a un brazo de transferencia […]
Codificador giratorio, del 22 de Abril de 2020, de CMR Surgical Limited: Un codificador de posición para detectar la posición giratoria relativa de la primera y segunda partes alrededor de un eje de rotación, […]
Sistemas y métodos de conmutación de salida para sensores de campo magnético, del 11 de Marzo de 2020, de INFINEON TECHNOLOGIES AG: Un sensor, que comprende: un elemento sensor; y una circuitería del sensor acoplada al elemento sensor, el elemento sensor configurado para detectar […]
 Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Procedimiento y aparato para codificación magnética seccional de un eje y para medición de ángulo de rotación, velocidad de rotación y par, del 22 de Enero de 2020, de GENERAL ELECTRIC COMPANY: Sistema que comprende un eje codificado magnéticamente y un sistema de detección de campo magnético, caracterizado por el hecho de […]
Cuentarrevoluciones magnético para la autodetección de estados de error al determinar el número de revoluciones detectables con este cuentarrevoluciones, del 23 de Octubre de 2019, de Leibniz-Institut für Photonische Technologien e.V: Cuentarrevoluciones magnético o contador de desplazamiento para la autodetección de estados de error al determinar números de revoluciones o números de desplazamientos […]
Recopilación y/o procesamiento de datos de múltiples sensores, del 4 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: detectar el movimiento de un dispositivo en respuesta a la recepción de una señal desde un acelerómetro […]