Método y sistema para la medición directa y sin contacto de la temperatura superficial en un cable.
Sistema de medición directa y sin contacto de la temperatura superficial en un cable,
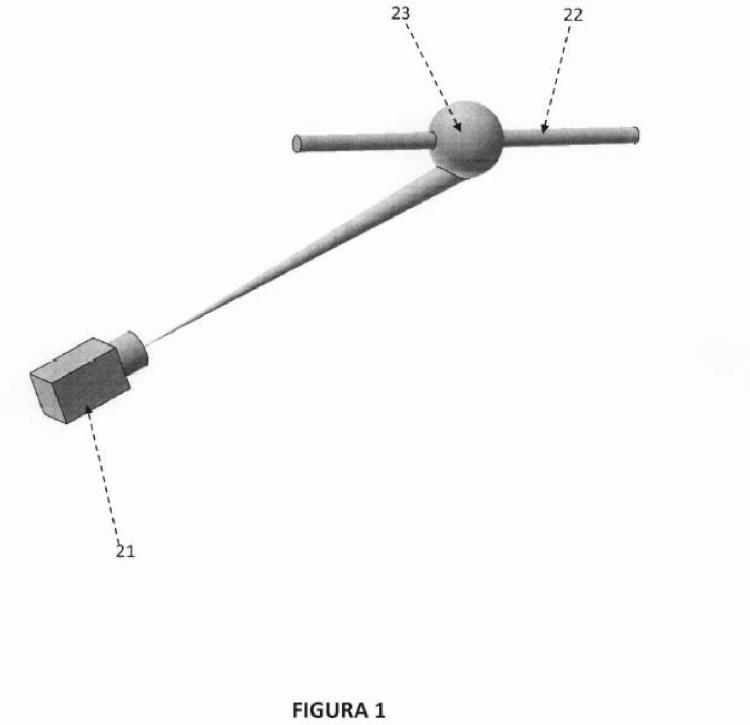
que comprende al menos un cable (22) cuya temperatura desea ser monitorizada al menos un cuerpo de medición térmica (23) envolviendo cada cable (22), tal que cada cuerpo de medición térmica (23) envuelve a un único cable (22); y al menos un sensor de temperatura sin contacto (21) que enfoca al menos un cuerpo de medición térmica (23), estando cada cuerpo de medición térmica (23) configurado para incrementar el área efectiva sobre el cual incide al menos un sensor de temperatura sin contacto (21), incrementándose así la distancia a la cual puede realizar la medida el sensor de temperatura sin contacto (21), y estando cada sensor de temperatura sin contacto (21) configurado para asegurar que en todo momento su superficie de medición se encuentre dentro de la superficie de cada cuerpo de medición térmica (23) que enfoca, considerando los desplazamientos máximos que cada cuerpo de medición térmica (23) puede sufrir. Un método de medición directa y sin contacto de la temperatura superficial en un cable, utilizando el sistema definido.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201401013.
Solicitante: UNIVERSIDAD DE CANTABRIA.
Nacionalidad solicitante: España.
Inventor/es: MAÑANA CANTELI, MARIO, ARROYO GUTIERREZ,Alberto, CASTRO ALONSO,Pablo Bernardo, MADRAZO MAZA,Alfredo, VALLI,Cristina, GONZÁLEZ DIEGO,Antonio, MARTÍNEZ TORRE,Raquel, LASO PÉREZ,Alberto, DOMINGO FERNÁNDEZ,Rodrigo, SIERRA MOLLEDA,Alberto.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01J5/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01J MEDIDA DE LA INTENSIDAD, DE LA VELOCIDAD, DEL ESPECTRO, DE LA POLARIZACION, DE LA FASE O DE CARACTERISTICAS DE IMPULSOS DE LA LUZ INFRARROJA, VISIBLE O ULTRAVIOLETA; COLORIMETRIA; PIROMETRIA DE RADIACIONES. › G01J 5/00 Pirometría de las radiaciones. › Detalles.
Fragmento de la descripción:
Particularizando para las líneas eléctricas de transporte y distribución de la energía, en épocas pasadas éstas se construyeron con el objetivo de dar un servicio eléctrico a los clientes. Dicha construcción no tuvo en cuenta el posible incremento de la demanda eléctrica a 10 largo de los años. Es por ello que conforme transcurrían los años dichas líneas eléctricas vieron su carga incrementada progresivamente hasta llegar a un punto en el cual dichas líneas alcanzaron unos valores de carga que no podían ser sobrepasados sin poner en peligro la vida de los diferentes elementos eléctricos que las componían (transformadores, cables, etc.) .
Ante este problema se podían tomar dos alternativas. La primera era la construcción de nuevos tendidos eléctricos y la segunda era optimizar las líneas existentes.
Es fácilmente entendible que la primera de las soluciones resultaba muy costosa y en algunos casos impracticable por motivos medioambientales e incluso legales. Es por esto que la búsqueda de métodos que optimizaran el uso de las redes de transporte se hacía indispensable.
Con motivo de todo esto se empezó a trabajar sobre un nuevo concepto, denominado ampacidad. Dicho concepto no es más que la máxima intensidad de corriente que puede circular de manera continua por un conductor eléctrico sin que éste sufra daños, estudiando en detalle la temperatura que alcanza dicho conductor.
Un ejemplo práctico desarrollado en el sistema eléctrico español se describe en F. Soto y otros, "Increasing the Capacity of Overhead Lines in the 400 Kv Spanish Transmission Network: Real Time Thermal Ratings", Cigré Session, 22-211, ParisFrance, 1998. De esta forma la ampacidad comparada con la corriente que circule en cada momento por el conductor nos dirá cuan de cargada se encuentra la línea, que es dual a comparar la temperatura máxima que soporte el conductor con la temperatura instantánea del conductor.
De este modo, la detenninación de la temperatura superficial del conductor se puede realizar bien de manera teórica o bien mediante su monitorización en tiempo real.
La primera de las opciones, y por otro lado la más sencilla, consiste en monitorizar únicamente las condiciones meteorológicas del entorno donde se encuentra emplazada la línea aérea y mediante cálculos teóricos aproximar la temperatura alcanzada en el conductor. Para ello es necesaria la colocación de una serie de estaciones meteorológicas que nos pennitan monitorizar datos como el viento (velocidad y dirección) , la radiación solar, la humedad, la temperatura ambiente, etc. Mediante dichas mediciones y conociendo la corriente que circula por el cable se puede detenninar la temperatura que alcanza la superficie del cable.
Este método de cálculo esta nonnalizado, siendo las principales nonnas a seguir la "Mathematical Model for Evaluation of Conductor Temperature in the Steady (or Quasi-Steady) State (Nonnal Operation) , Cigre, Electra No. 144, Oct. 1992, PP. 109115" Y la "IEEE Standard for calculating the current-temperature of bare overhead conductors, IEEE STD 738-2006 (Revision ofIEEE STD 738-1993) "
Este método es sencillo de implementar pero introduce una detenninada incertidumbre debido a factores como el error en la medición del viento [G.M. Beers, S.R. Gilligan,
H.W. LIS, J.M. Schamberger: "Transmission Conductor Ratings", lEE Transactions Power Apparatus and Systems, Vol. Pas-82, PP. 767-75, 1963] [Drager HJ, Hussels D, Puffer R. "Development and Implementation of a Monitoring System to Increase the Capacity ofOverhead Lines". 42nd Cigre Session, Paris, August 2008"], la localización de los puntos más calientes en la línea, la zona que pueda mitigar el viento, etc.
Una opción intennedia es utilizar un método que combina la monitorización en tiempo real de la temperatura ambiente y valores prefijados desfavorables para el viento y la radiación solar ["Guide for the Selection of Weather Parameters for Bare Overhead Conductor Ratings", Cigré 82-12 Brochure (Ref. No. 299) , 2006]. Las principales incertidumbres que presentan estos dos métodos son: la introducida por la medición de la velocidad del viento y la cometida en el cálculo de la temperatura del conductor.
La segunda de las opciones consiste en llevar a cabo la monitorización de la temperatura de los conductores aéreos en tiempo real. Para ello se requiere de dispositivos adicionales (generalmente instalados en el conductor) que añaden ciertas incertidumbres en las mediciones. Son estas incertidumbres y el coste de dichos dispositivos los que pueden decidir la viabilidad del uso de los mismos.
De este modo conociendo la temperatura del conductor y los datos meteorológicos anteriormente mencionados se puede bien comparar dicha temperatura con la máxima que soporte el conductor en cuestión o bien calcular la corriente que circula por el cable para posteriormente poder ser cotejada con la ampacidad [S.O. Foss, S.H. Lin,
R.A. Femandes, "Dynamic thermal line ratings. Part I. Dynamic ampacity rating algorithrn", IEEE Transactions on Power Apparatus and Systems, Vol. 102, No. 6, pp. 1858-64, 1983]
Por todo esto surgieron multitud de métodos de monitorización, pudiéndose agrupar en dos grandes conjuntos: de medición indirecta de la temperatura y de medición directa. Los primeros realizan una medición indirecta, es decir, miden otros parámetros que posteriormente son convertidos a valores de temperatura, mientras que los segundos miden directamente la temperatura superficial del conductor o un parámetro directo relacionado con dicha temperatura.
Existe una gran variedad de métodos indirectos de medición de la temperatura.
Un sistema comercial de medición indirecta permite calcular la temperatura en el conductor eléctrico midiendo la elongación que se produce en el mismo conforme varia su temperatura. Algunas referencias a este sistema se pueden ver en las patentes: US-5235861, US-5517864, US-5918288; yen: -Albizu, I.; Femandez, E.; Mazon, A.J.; Bengoechea, J.; Torres, E., "Hardware and software architecture for overhead line rating monitoring, " PowerTech, 2011 IEEE
Trondheim, vol., no., pp.1, 6, 19-23 June 2011; -T. o. Seppa, "A practical approach for increasing the therma1 capabi1ities of transmission lines", IEEE transactions on power deliver y , Vol. 8, N° 3, PP. 1536-50, July 1993; -T. o. Seppa, "Factors influencing the accuracy of high temperature SAG calculations", IEEE transactions on power deliver y , Vol. 9, N° 2, PP. 1079-1089, April 1994; -T. o. Seppa, "Accurate ampacity determination: temperature-SAG model for operational real time ratings", IEEE transactions on power deliver y , Vol. 10, N° 3, PP. 1460-1470, July 1995; -J. Reason, "Tension monitoring: direct route to dynamic rating", Electrical world, Vol. 209, No. 8, August, PP. 22-25, 1995; -T.O. Seppa y otros, "Use ofon-line tension monitoring for real-time thermal ratings, ice loads and other environmental effects", Cigré session, 22-102, París-France, 1998; -T.O. Seppa y otros, "Application of real time thermal ratings for optimizing transmission line investment and operating decisions", Cigré Session, 22-301, París France, 2000; -T.O. Seppa, "Increasing transmission capacity by real time monitoring", IEEE PES winter meeting, PP. 1208-11, 2002; -H.L.M. Boot, F.H. de Wild, A.H. Van der Wey, G. Biedenbach, "Overhead line local and distributed conductor temperature measurement techniques, models and experience at TZH", Cigré Session, 22-205, París-France, 2002; y -M. Weibel, K. Imhof, W. Sattinger, U. Steinegger, M. Zima, G. Biedenbach, "Overhead line temperature monitoring pilot project", Cigré Session, B2-311, París France, 2006.
Otro método de medición indirecta consiste en colocar un inc1inómetro en el conductor de manera que se puede medir el ángulo que forma el cable con la horizontal. Dicho ángulo está directamente relacionado con la temperatura del conductor [Poorani Ramachandran, Vijay Vittal and Gerald Thomas Heydt, "Mechanical state estimation for overhead transmission lines with level spans", IEEE transactions on power
systems, Vol. 23, No. 3, August 2008].
También se pueden encontrar métodos que utilizan la flecha existente en el conductor para medir la temperatura del conductor de manera indirecta. Dicha flecha puede ser medida de diferentes métodos: mediante el procesamiento de imágenes (Sagometer)
[B. Forbes, D. Bradshaw, F. Campbell, "Finding hidden capacity in transmission lines", transmission & distribution world, September 2002], mediante tecnología láser [Azlan Abdul Rahim and Izham Zainal Abidin, "Thermal rating monitoring of the TNB overhead transmission line using line ground clearance measurement and
4th
...
Reivindicaciones:
1. Sistema de medición directa y sin contacto de la temperatura superficial en un cable, caracterizado por que comprende al menos un cable (22) cuya temperatura desea ser monitorizada; al menos un cuerpo de medición térmica (23) envolviendo cada cable (22) , tal que cada cuerpo de medición térmica (23) envuelve a un único cable (22) ; y al menos un sensor de temperatura sin contacto (21) que enfoca a al menos un cuerpo de medición térmica (23) , estando cada cuerpo de medición térmica (23) configurado para incrementar el área efectiva sobre el cual incide al menos un sensor de temperatura sin contacto (21) , incrementándose así la distancia a la cual puede realizar la medida el sensor de temperatura sin contacto (21) , Y estando cada sensor de temperatura sin contacto (21) configurado para asegurar que en todo momento su superficie de medición se encuentre dentro de la superficie de cada cuerpo de medición térmica (23) que enfoca, considerando los desplazamientos máximos que cada cuerpo de medición térmica (23) puede sufrir.
2. El sistema de la reivindicación 1, donde cada cuerpo de medición térmica (23) es enfocado por un único sensor de temperatura sin contacto (21) .
3. El sistema de la reivindicación 1, donde cada cuerpo de medición térmica (23) es enfocado por al menos dos sensores de temperatura sin contacto (21) , con el fin de tener asegurada la monitorización de la temperatura en aquellos puntos críticos.
4. El sistema de la reivindicación 1, donde cada sensor de temperatura sin contacto (21) enfoca a al menos dos cuerpos de medición térmica (23) .
5. El sistema de cualquiera de las reivindicaciones anteriores, donde el sensor de temperatura sin contacto (21) es un sensor de temperatura láser de infrarrojos, y permite ajustar el valor de su emisividad para poder medir la temperatura sobre diferentes materiales.
6. El sistema de cualquiera de las reivindicaciones anteriores, donde la superficie de cada cuerpo de medición térmica (23) que se encuentra en contacto con el cable (22) que envuelve, presenta una pasta térmica que facilita el calentamiento de dicho cuerpo de medición térmica (23) y consigue que la inercia térmica del cable (22) y la del cuerpo de medición térmica (23) que lo envuelve, sea lo más similar posible.
7. El sistema de cualquiera de las reivindicaciones anteriores, donde dicho cable (22) cuya temperatura se desea monitorizar es un cable conductor de una línea eléctrica.
8. El sistema de la reivindicación 7, donde el sensor de temperatura sin contacto (21) se sitúa en el apoyo (24) , unido a su celosía.
9. El sistema de cualquiera de las reivindicaciones 7 a 8, que comprende además un cable conductor sin tensión, réplica del cable (22) conductor cuya temperatura se desea monitorizar y próximo al vano que se está monitorizando, tal que dicho cable réplica comprende su propio conjunto sensor de temperatura sin contacto-cuerpo de medición térmica, además de una sonda de temperatura de contacto, con el fin de tener perfectamente monitorizada la temperatura del mismo, y obtener el valor exacto de emisividad a lo largo del tiempo para poder ser extrapolado al cable (22) bajo estudio.
10. El sistema de cualquiera de las reivindicaciones anteriores, donde el cuerpo de medición térmica (23) posee aristas redondeadas y está formado por dos unidades separables que al unirse forman un único elemento con una abertura en su centro, por la que pasa el cable (22) .
11. El sistema de cualquiera de las reivindicaciones 1 a 9, donde el cuerpo de medición térmica (23) posee aristas redondeadas yes un único elemento inseparable que posee una abertura en su parte central, por la que pasa el cable (22) .
12. El sistema de cualquiera de las reivindicaciones anteriores, donde el material del cuerpo de medición térmica (23) es del mismo material que la capa externa del cable
(22) cuya temperatura monitoriza.
13. Método de medición directa y sin contacto de la temperatura superficial en un cable, utilizando el sistema de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado por que comprende las etapas de:
-determinar el número de cables (22) cuya temperatura se desea medir y, para cada cable (22) , establecer el número de cuerpos de medición térmica (23) a instalar y el número de sensores de temperatura sin contacto (21) que enfocan a cada cuerpo de medición térmica (23) ;
-monitorizar los datos de velocidad V xy [mis] y dirección qJx [0] de viento en el tramo de cable (22) donde se coloca cada cuerpo de medición térmica (23) ;
-calcular el desplazamiento máximo horizontal Xv [m] y el desplazamiento
z, _z
máximo vertical YV~_J[ [m] que cada cable (22) que se desea monitorizar, y por consiguiente cada cuerpo de medición térmica (23) que lo envuelve, puede sufrir debido a la acción del viento;
-calcular la superficie SH que pueden generar dichos desplazamientos máximos en su trayectoria, desde la posición de equilibrio del cable (22) hasta las posiciones alcanzadas por el cable (22) debidas a los máximos desplazamientos originados por la acción del viento;
-obtener del manual de especificaciones del sensor de temperatura sin contacto (21) , el área de medición SL sobre el que realiza las mediciones, y la distancia óptima de medición que debe existir entre cada sensor de temperatura sin contacto (21) y cada cuerpo de medición térmica (23) que enfoca;
-determinar las dimensiones mínimas de cada cuerpo de medición térmica, tal que el
área de medición del sensor de temperatura sin contacto SL , se encuentre siempre dentro de la superficie SM;
-para cada cable (22) , colocar cada cuerpo de medición térmica (23) establecido, tal que a cada cable (22) le envuelven tantos cuerpos de medición térmica (23) como puntos del cable (22) se desean monitorizar;
-colocar cada sensor de temperatura sin contacto (21) en una posición tal que permita realizar una medida adecuada, y respetando las especificaciones de dicho sensor de temperatura sin contacto (21) ;
-calibrar cada sensor de temperatura sin contacto (21) Y definir el valor de emisividad;
-realizar la medida directa y sin contacto de la temperatura superficial de cada cuerpo de medición térmica (23) , sin el contacto de cada sensor de temperatura sin contacto (21) que enfoca a cada cuerpo de medición térmica (23) .
14. Método de la reivindicación 13, donde el cable (22) cuya temperatura se desea monitorizar es un cable conductor de una línea eléctrica, y comprende además las etapas de:
-antes de determinar el número de cables (22) , de cuerpos de medición térmica (23) y de sensores de temperatura sin contacto (21) , determinar el número de vanos a monitorizar;
-monitorizar la temperatura ambiente en el tramo de cable (22) donde se coloca el cuerpo de medición térmica (23) ;
-antes de calcular la superficie SM' calcular el desplazamiento Y~máximo que cada cuerpo de medición ténnica (23) puede sufrir debido a la dilatación del cable
(22) conductor al pasar corriente a través de él, y calcular el desplazamiento Y;=., o máximo que cada cuerpo de medición térmica (23) puede sufrir debido a la contracción del cable conductor por la temperatura ambiente;
-calcular la superficie Sil que pueden generar no sólo los desplazamientos máximos originados por la acción del viento, sino además los desplazamientos máximos originados por la dilatación y contracción del cable (22) en su trayectoria, desde la posición de equilibrio del cable (22) hasta las posiciones alcanzadas por el cable (22) debidas a los máximos desplazamientos originados por la acción del viento y por la dilatación/contracción del mismo;
-antes de la instalación de cada cuerpo de medición térmica (23) en el cable (22) conductor, realizar un preacondicionamiento de dicho cuerpo de medición ténnica (23) que permita disminuir el brillo de la superficie y mejorar la medición realizada por el sensor de temperatura sin contacto (21) ;
-colocar un cable conductor sin tensión réplica del cable (22) conductor cuya temperatura se desea monitorizar y próximo al vano que se está monitorizando, tal que dicho cable réplica comprende su propio conjunto sensor de temperatura sin contacto-cuerpo de medición térmica, además de una sonda de temperatura de contacto, con el fin de tener perfectamente monitorizada la temperatura del mismo, y obtener el valor exacto de emisividad a 10 largo del tiempo e introducir dicho valor en el sensor de temperatura sin contacto (21) .
15. Método de la reivindicación 14, que comprende además las etapas de:
-aplicar a la superficie de cada cuerpo de medición térmica (23) , una pasta térmica que facilite el calentamiento de dicho cuerpo de medición térmica (23) y que permita que la inercia ténnica del cable (22) y la de cada cuerpo de medición ténnica (23) que 10 envuelve, sean lo más similar posible;
-si existe un único cuerpo de medición ténnica (23) por cable (22) , colocar dicho cuerpo de medición térmica (23) en el lugar del cable (22) más próximo posible al
amarre (26) , minimizando así el desplazamiento que pueda producir en dicho cuerpo de medición térmica (23) fenómenos como el viento o la dilatación/contracción del cable (22) debidas al paso de corriente a través del cable (22) ;
-colocar cada sensor de temperatura sin contacto (21) en la celosía del apoyo (24) . 10
16. El método de cualquiera de las reivindicaciones 13 a 15, donde se calculan además los desplazamientos máximos que sufre el cable (22) , y por consiguiente el cuerpo de medición térmica (23) , debidos a otros factores tales como vibraciones, y donde la superficie Sil también se calcula teniendo en cuenta dichos desplazamientos máximos.
-"'
DETERMINAR EL NÚMERO --, ..
DE CABLES A MONITORIZAR
- --------------f -------------------·---
/-/-~--/-~-----.'-
<// PARA CADA " '-, _>, ....~_---, ~ CABLE / / ~ ~~_//
- DISTANCIA ÓPT¡MA-E-NTRE-ELSENSOR-DE~ TEMPERATUR, A SIN CONTACTO Y EL CUERPO DE
lD~~F~~~~~~EfgE
MEDICiÓN TERMICA INDICADA EN LA HOJA DE
@
ESPECIFICACIONES DEL SENSOR
----------~ -----___ ~-=_=_-.•-:==-::~i":~::=::==-.
- -----------_._-_.._ --------------_. ._-------_.. _._----------------
CALCULAR EL MÁXIMO DESPLAZAMIENTO DEL CABLE DEBIDO A LA ACCiÓN DEL VIENTO
~===:--=~=:-~·~-3-==~--~=-
CALCULAR LA SUPERFICIE SM QUE GENERAN LOS MÁXIMOS DESPLAZAMIENTOS
------------~¡~--:_-=:_~ _. :.:::: -
DETERMINAR LAS DIMENSIONES MíNIMAS DEL CUERPO/S DE MEDICiÓN TÉRMICA QUE GARANTICEN LA CONTINUA VISiÓN SENSOR-CUERPO
-----_J u______
COLOCAR EL CUERPO/S DE] MEDICiÓN TÉRMICA Y EL SENSOR DE TEMPERATURA SIN CONTACTO A LA DISTANCIA ÓPTIMA
1-~~I;~é:~~~~Ej
, ~--=~-_l=-
REALIZAR LA MEDIDA DIRECTA Y SIN CONTACTO DE LA TEMPERATURA SUPERFICIAL DEL CUERPO/S DE MEDICiÓN
FIGURA 3
-~ ----~~-~---. ---~--.
VARIACIONES EN LA VELOCIDAD DEL VIENTO EN EL TERRENO (VALLES, CAÑONES, ETC)
~----~~--~ ~
- --------- --- --.. .
MONITORIZAR EL HISTÓRICO DE ~ TEMPERATURA AMBIENTE ~
---~·~NI;~RIZ~~~~-I~TÓ~·;~~-~~~;~:) -~~~~
VELOCIDAD Vxv y DIRECCiÓN C1lx EN EL VANO EN CUESTiÓN
~ ._-_._
LA SUPERFICIE DE MEDICiÓN SL DEL SENSOR DE TEMPERATURA SIN CONTACTO INDICADA EN LA HOJA DE ESPECIFICACIONES DEL MISMO
~-----------
DIS-TANCIA ÓPTIM
----AENTREE;:SENSoRD~ TEMPERATURA SIN CONTACTO Y EL CUERPO DE MEDICiÓN TÉRMICA INDICADA EN LA HOJA DE
@
ESPECIFICACIONES DEL SENSOR ------'
'-'-----------_._----------
---~· ~ETER~IN~·~~L. ---]
NÚMERO N DE VANOS A MONITORIZA~
---~-~.J~~~, -~
/ / PARA CADA -'-, <'~VANO .// >
--._.._--_._-~~~~~--. --------¡
DETERMINAR EL NUMERO DE CABLES A MONITORIZAR
------------~::f.~-, -----. --.
</····PARA CADA" "--, "~o CABLE / / >+------.
.___ ~L~:~J
.__ _ --. ----~
DETERMINAR EL NUMERO DE SENSORES Y CUERPOS DE MEDICiÓN TÉRMICA A COLOCAR
:___::==--::=~3--::-==-==-·..
CALCULAR EL MÁXIMO DESPLAZAMIENTO DEL CABLE DEBIDO A LA ACCiÓN DEL VIENTO
==-=--:---:~-~_~.:-:-~==, f--·~___:====_=_:::_
CÁLCULAR EL MÁXIMO DESPLAZAMIENTO DEL CONDUCTOR DEBIDO A LA DILATACiÓN/CONTRACCiÓN TÉRMICA
. ~-:=-~":'=-~~-:--T~:--~.:-= :~--:=:~
CALCULAR LA SUPERF~ClE SM QUE] GENERAN LOS MAXIMOS DESPLAZAMIENTOS
-._-~~. -:::--------
ETERMINAR LAS DIMENSIONES MINIMAS1 DEL CUERPO/S DE MEDICiÓN TÉRMICA QUE GARANTICEN LA CONTINUA VISiÓN SENSOR-CUERPO
_:-... =-__
. -===.:E =====
COLOCAR EL CUERPO/S DE MEDICiÓN TÉRMICA Y EL SENSOR DE TEMPERATURA SIN CONTACTO A LA DISTANCIA ÓPTIMA
=-~~-: == ===-==::¡=.=-:::=-~--~~=-=:
REALIZAR UN PREACONDICIONAMIENTO DEL CUERPO/S DE MEDICiÓN TÉRMICA Y COLOCAR CONJUNTO CABLE/SENSOR/ CUERPO RÉPLICA
.~~=---:=:=.=:~-=:-.=y:.==.::=-. .. ~.
CALIBRAR EL SENSOR/ES DE TEMPERATURA SIN CONTACTO
-=:==-:==--:=--=--=-==. ::=:-::------_._----_.
REALIZAR LA MEDIDA DIRECTA Y SIN CONTACTO DE LA TEMPERATURA SUPERFICIAL DEL CUERPO/S DE MEDICiÓN
FIGURA 4
N
~----------------------------------
I "" I '"
I ", Pos ición
I " I '" I ""
Equilibr io I "" I "
I ",
Viento Max,
I "" I '" I "
I "
I I r:p " ', , __
: """ F
I ",
I / I //
X
o I /
d
I ¡/
L
I ///
x ""'
I / I // I //
I // >-I I
~---
Posición I
I
I I Equilibrio I I
I T ~o'Mbiente Sin Viento V Y
I
r-
s
FIGURA 5
Vz
Vy
-1=-
FIGURA 6
1 1
- ---l--
Posición 1
MíniMQ T~
U
~-------~-------
Sin Viento . --l--O
o /
/'
Pos ic ión
~ ~~l~~~~~e ~ ----
Sin Viento \
/
Posic ión M&xiMQ TQ
---------~------
Sin
Viento 1
1 1 1
Y v
FIGURA 7
--------- (::>
r ----------~-----
~ o...
o...
s....
x s..
C ClJ
ClJ
d
L ::s
: E ::S
f-U
f-u
_:________L >
/
y ~
1
:1 x2 1
FF-----------------------------------~~
X 1
o 1
I 1
~~-------------~
:d cuerpo 2 }Y2
I
""--<>1
1
-----------~
x
f cuerpo f MUX
Yo h
XI
FIGURA 8
N X
I
¡y
s
FIGURA 9
Patentes similares o relacionadas:
Un método de inspección y a un dispositivo de inspección para contenedores, del 4 de Noviembre de 2019, de KRONES AG: Un método para inspeccionar los contenedores de bebidas de vidrio, en el que el contenedor se transporta a lo largo de una ruta de […]
Sistema de medición de la temperatura, del 28 de Agosto de 2019, de BSH HAUSGERÁTE GMBH: Sistema de medición de la temperatura para la medición de la temperatura sin contacto de un recipiente de cocción que se encuentra sobre un […]
Termómetro de infrarrojos, del 21 de Agosto de 2019, de Bio Echo Net Inc: Un termómetro de infrarrojos capaz de medir una temperatura corporal sin contacto con un cuerpo humano (TG), que comprende: una unidad principal […]
Termómetro infrarrojo, del 1 de Mayo de 2019, de MICROLIFE INTELLECTUAL PROPERTY GMBH: Un termómetro infrarrojo con un sensor infrarrojo, adaptado para determinar la temperatura de un paciente basándose en una medición en un punto predeterminado sobre o en […]
Detector con conjunto óptico en miniatura para captación de energía constante desde diferentes distancias, del 24 de Abril de 2019, de Gerlitz, Yonathan: Aparato para la medición, a distancia, de luz infrarroja, que comprende un detector , un conjunto óptico y una apertura , en donde el conjunto óptico crea una imagen […]
Conjunto de ventana de infrarrojos con rejilla protectora, del 12 de Marzo de 2019, de Robinson, Martin: Un conjunto de ventana de infrarrojos 10 montado en un agujero proporcionado en un alojamiento para aparatos sometidos a inspección de infrarrojos, el conjunto […]
 Dispositivo de medición de la temperatura superficial y método de medición de la temperatura superficial, del 27 de Septiembre de 2018, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un método de medición de la temperatura superficial para medir la temperatura superficial de un material objetivo (W) de medición de temperatura, […]
Dispositivo de medición de la temperatura superficial y método de medición de la temperatura superficial, del 27 de Septiembre de 2018, de NIPPON STEEL & SUMITOMO METAL CORPORATION: Un método de medición de la temperatura superficial para medir la temperatura superficial de un material objetivo (W) de medición de temperatura, […]
Cubierta de sonda para termómetro de oído, del 10 de Enero de 2018, de ACTHERM INC.: Una cubierta de sonda para un termómetro de oído, que se utiliza para alojar una sonda del termómetro de oído y una parte inferior de […]