Mecanismo de rueda dentada de aplicador de grapas quirúrgicas.
Un aplicador de grapas quirúrgicas (10) que comprende:
una carcasa de mango (12) que tiene 5 un gatillo (16) móvil en una primera dirección de una posición abierta a una posición cerrada,
y una segunda dirección de la posición cerrada a la posición abierta, incluyendo el gatillo (16) una posición parcialmente cerrada localizada entre las posiciones abierta y cerrada;
un vástago alargado (18) que se extiende desde la carcasa de mango (12) y que tiene mordazas opuestas (20) formadas en un extremo distal del mismo, siendo el gatillo (16) eficaz para mover las mordazas opuestas (20) entre una posición abierta y una posición cerrada, caracterizado por;
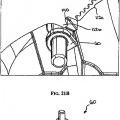
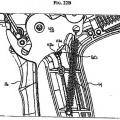
un mecanismo de control de gatillo que comprende un mecanismo de rueda dentada dispuesto dentro de la carcasa de mango, en el que el mecanismo de rueda dentada incluye una serie de dientes (112) formados sobre un inserto de gatillo (48) pivotantemente dispuesto dentro de la carcasa de mango (12), y un trinquete (60) rotacionalmente dispuesto dentro de la carcasa de mango (12) y adaptado para enganchar la serie de dientes (112) formados sobre el rueda dentada, en el que la serie de dientes (112) comprende un primer conjunto de dientes (112a) adaptado para limitar el movimiento del gatillo (16) a la primera dirección cuando el gatillo (16) está posicionado entre la posición abierta y la posición parcialmente cerrada, y una muesca (140) formada entre un diente del extremo (112b) y el primer conjunto de dientes (112a) y adaptada para permitir el libre movimiento del gatillo (16) en la primera y segunda direcciones cuando el gatillo (16) está posicionado entre la posición parcialmente cerrada y la posición cerrada.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06252082.
Solicitante: ETHICON ENDO-SURGERY, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 4545 CREEK ROAD CINCINNATI, OHIO 45242 ESTADOS UNIDOS DE AMERICA.
Inventor/es: HUITEMA, THOMAS W., Koch Jr,Robert L.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/12 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para ligar o comprimir partes tubulares del cuerpo, p. ej. los vasos sanguíneos, el cordón umbilical.
- A61B17/128 A61B 17/00 […] › para aplicar o quitar clamps o pinzas.
PDF original: ES-2523171_T3.pdf
Fragmento de la descripción:
CAMPO DE LA INVENCIÓN
La presente invención se refiere ampliamente a dispositivos quirúrgicos, y en particular a procedimientos y dispositivos para aplicar grapas quirúrgicas a conductos, vasos, derivaciones, etc.
ANTECEDENTES DE LA INVENCIÓN
En los últimos años, la cirugía ha avanzado notablemente mediante la realización de procedimientos quirúrgicos laparoscópicos y endoscópicos tales como colecistectomías, gastrostomfas, apendectomías y reparación de hernia. Estos procedimientos se llevan a cabo mediante un ensamblaje de trocar, que es un instrumento quirúrgico usado para perforar una cavidad del cuerpo. El trocar normalmente contiene una punta de obturador afilada y un tubo de trocar o cánula. La cánula del trocar se inserta en la piel para acceder a la cavidad del cuerpo, usando la punta de obturador para penetrar la piel. Después de la penetración, el obturador se saca y la cánula del trocar sigue en el cuerpo. Es mediante esta cánula que se colocan los instrumentos quirúrgicos.
Un instrumento quirúrgico que se usa comúnmente con una cánula del trocar es un aplicador de grapas quirúrgicas para ligar un vaso sanguíneo, un conducto, derivación, o una parte del tejido del cuerpo durante la cirugía. La mayoría de los aplicadores de grapas normalmente tienen un mango con un vástago alargado que tiene un par de mordazas opuestas móviles formadas sobre un extremo del mismo para sujetar y formar una grapa de ligadura entremedias. Las mordazas están posicionadas alrededor del vaso o conducto, y la grapa se aprieta o forma sobre el vaso por el cierre de las mordazas. El documento US 55826615 desvela un mango para sistemas aplicadores de grapas quirúrgicas que comprende una rueda dentada que incluye un miembro de cuerpo alargado que tiene una pluralidad de dientes serrados.
En muchos de los aplicadores de grapas de la técnica anterior, los mecanismos de avance y formación requieren movimiento sincronizado y coordinado preciso de los componentes para operar. Esta necesidad de sincronización y control precisa ha producido la necesidad de diseños mecánicos complejos, aumentando así el coste de los aplicadores de grapas. Muchos aplicadores de grapas de la técnica anterior también usan un ensamblaje de avance accionado por muelle para avanzar una o más grapas a través del vástago del dispositivo. Como resultado, las mordazas deben contener un mecanismo para impedir la proyección accidental de la grapa del dispositivo antes de que se forme la grapa. Otros inconvenientes de los actuales aplicadores de grapas incluyen la incapacidad de manipular una sobrecarga aplicada a las mordazas por el gatillo bajo una variedad de condiciones. Muchos dispositivos requieren el cierre de las mordazas, que puede producir sobrecarga sobre las mordazas cuando el vaso o conducto posicionado entremedias es demasiado grande para permitir el cierre completo, o cuando un objeto extraño está posicionado entre las mordazas. La publicación de patente europea n° EP 1462063 se refiere a un aplicador de grapas flexible que incluye un mecanismo de rueda dentada adaptado para localizar un empujador de grapas en una localización conocida después de la utilización de la grapa más distal.
Por consiguiente, sigue existiendo la necesidad de procedimientos y dispositivos mejorados para aplicar grapas quirúrgicas a vasos, conductos, derivaciones, etc.
RESUMEN DE LA INVENCIÓN
La presente invención se refiere a un aplicador de grapas quirúrgicas como se describe en la reivindicación 1. La presente divulgación proporciona procedimiento y dispositivos para aplicar una grapa quirúrgica a un vaso, conducto, derivación, etc. En una realización a modo de ejemplo, se proporciona un aplicador de grapas quirúrgicas que tiene una carcasa con un gatillo móvilmente acoplado a la misma y un vástago alargado que se extiende desde la misma con mordazas opuestas formadas sobre un extremo distal del mismo. El gatillo está adaptado para avanzar una grapa para posicionar la grapa entre las mordazas, y para mover las mordazas de una posición abierta a una posición cerrada para apretar la grapa posicionada entremedias.
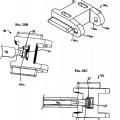
El aplicador de grapas quirúrgicas puede tener una variedad de configuraciones, y puede incluir una variedad de características para facilitar el avance y la formación de una grapa quirúrgica. En una realización, el aplicador de grapas quirúrgicas puede incluir una zapata alimentadora que está deslizablemente dispuesta dentro del vástago alargado y que está adaptada para accionar al menos una grapa quirúrgica a través del vástago alargado. En una realización a modo de ejemplo, la zapata alimentadora puede adaptarse para moverse solo en una dirección distal, de forma que el movimiento proximal de la zapata alimentadora se impide sustancialmente. El vástago alargado también puede incluir un recorrido de la grapa dispuesta en su interior y adaptado para insertar al menos una grapa quirúrgica. La zapata alimentadora puede disponerse deslizablemente dentro del recorrido de la grapa.
Puede usarse una variedad de técnicas para facilitar el movimiento distal e impedir el movimiento proximal de la zapata alimentadora. En una realización a modo de ejemplo, la zapata alimentadora puede incluir una espiga
adaptada para enganchar el recorrido de la grapa para impedir el movimiento proximal de la zapata alimentadora dentro del recorrido de la grapa, aunque permite el movimiento distal de la zapata alimentadora dentro del recorrido de la grapa. El recorrido de la grapa puede Incluir varias aberturas formadas en su interior para recibir la espiga para impedir el movimiento proximal de la zapata alimentadora dentro del recorrido de la grapa. En otra realización a modo de ejemplo, la zapata alimentadora puede incluir una espiga y la barra de avance puede incluir varias retenciones formadas en su interior y adaptadas para enganchar la espiga para mover la zapata alimentadora distalmente cuando la barra de avance se mueve distalmente.
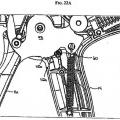
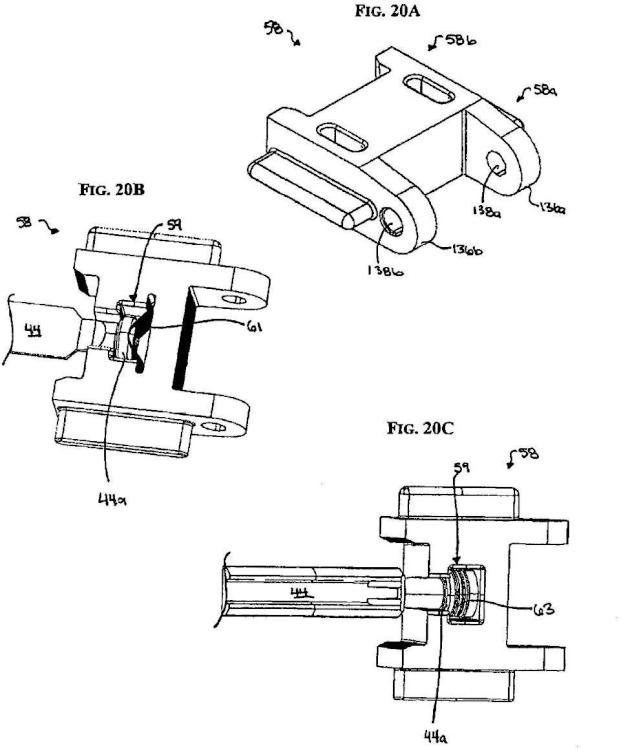
En otra realización, el vástago alargado puede incluir una barra de avance deslizablemente dispuesta en su interior y acoplada al gatillo de forma que el movimiento del gatillo hacia una posición cerrada se adapte para avanzar la barra de avance distalmente, avanzando así la zapata alimentadora distalmente. A modo de ejemplo no limitante, la barra de avance puede acoplarse al gatillo por un inserto de gatillo que está encajado con el gatillo, y por una articulación que se extiende entre el inserto de gatillo y el extremo proximal de la barra de avance. El extremo proximal de la barra de avance puede incluir un acoplador que está adaptado para recibir una parte de la articulación. La barra de avance también puede incluir un extremo distal que tiene un avanzador que está adaptado para enganchar una grapa más distal y para accionar la grapa más distal en las mordazas. En ciertas realizaciones a modo de ejemplo, la barra de avance puede adaptarse para enganchar e iniciar el avance de una grapa más distal en las mordazas antes de iniciar el avance de la zapata alimentadora.
En otra realización, se proporciona un ensamblaje de avance de grapas para avanzar una grapa a través de un aplicador de grapas quirúrgicas. El ensamblaje de avance de grapas puede usarse con una variedad de aplicadores de grapas quirúrgicas, que incluyen aquellos conocidos en la técnica. En una realización a modo de ejemplo, el ensamblaje de avance de grapas puede incluir un recorrido de la grapa que está adaptado para insertar al menos una grapa, y una zapata alimentadora que está adaptada para encajarse deslizablemente con el recorrido de la grapa y para moverse en una dirección distal para mover al menos una grapa dispuesta dentro del recorrido de la grapa en una dirección distal. La zapata alimentadora puede incluir, en una realización a modo de ejemplo, una espiga que está adaptada para enganchar el recorrido de la grapa para impedir el movimiento proximal de la zapata alimentadora dentro del recorrido de la grapa, y que está adaptada para permitir el movimiento distal de la zapata alimentadora dentro del recorrido de la grapa. El recorrido de la grapa puede incluir una pluralidad de aberturas formadas en su interior para recibir la espiga para Impedir el movimiento proximal de la zapata alimentadora dentro del recorrido de la grapa.
El ensamblaje de avance de grapas también puede incluir una barra de avance que está adaptada para acoplarse con un gatillo móvil formado sobre una carcasa de un aplicador de grapas quirúrgicas y que está adaptada para moverse deslizablemente distalmente cuando el gatillo se cierra para avanzar la zapata alimentadora y al menos una grapa dispuesta dentro del recorrido de la grapa. La barra de avance puede tener una variedad de configuraciones,... [Seguir leyendo]
Reivindicaciones:
1. Un aplicadorde grapas quirúrgicas (10) que comprende:
una carcasa de mango (12) que tiene un gatillo (16) móvil en una primera dirección de una posición abierta a una posición cerrada, y una segunda dirección de la posición cerrada a la posición abierta, incluyendo el gatillo (16) una posición parcialmente cerrada localizada entre las posiciones abierta y cerrada; un vástago alargado (18) que se extiende desde la carcasa de mango (12) y que tiene mordazas opuestas (20) formadas en un extremo distal del mismo, siendo el gatillo (16) eficaz para mover las mordazas opuestas (20) entre una posición abierta y una posición cerrada, caracterizado por;
un mecanismo de control de gatillo que comprende un mecanismo de rueda dentada dispuesto dentro de la carcasa de mango, en el que el mecanismo de rueda dentada incluye una serie de dientes (112) formados sobre un inserto de gatillo (48) pivotantemente dispuesto dentro de la carcasa de mango (12), y un trinquete (60) rotacionalmente dispuesto dentro de la carcasa de mango (12) y adaptado para enganchar la serie de dientes (112) formados sobre el rueda dentada, en el que la serie de dientes (112) comprende un primer conjunto de dientes (112a) adaptado para limitar el movimiento del gatillo (16) a la primera dirección cuando el gatillo (16) está posicionado entre la posición abierta y la posición parcialmente cerrada, y una muesca (140) formada entre un diente del extremo (112b) y el primer conjunto de dientes (112a) y adaptada para permitir el libre movimiento del gatillo (16) en la primera y segunda direcciones cuando el gatillo (16) está posicionado entre la posición parcialmente cerrada y la posición cerrada.
2. El aplicador de grapas quirúrgicas (10) de la reivindicación 1, en el que el primer conjunto de dientes (112a) está adaptado para impedir la rotación del trinquete (60) con respecto al mismo y el diente del extremo (112b) está adaptado para permitir la rotación del trinquete (60) con respecto al mismo.
3. El aplicador de grapas quirúrgicas (10) de la reivindicación 1, en el que el primer conjunto de dientes (112a) tiene un tamaño que es inferior a un tamaño de los dientes del extremo (112b).
4. El aplicador de grapas quirúrgicas (10) de la reivindicación 1, en el que un sonido audible es emitido tras el enganche del trinquete (60) y el primer conjunto de dientes (112a) y en el que un sonido audible diferente es emitido tras el enganche del trinquete (60) y el diente del extremo (112b).
Patentes similares o relacionadas:
Pieza de boca para un instrumento quirúrgico de vástago tubular, del 13 de Mayo de 2020, de AESCULAP AG: Pieza de boca para un instrumento quirúrgico de vástago tubular con un componente de sujeción , una primera rama con una primera zona de actuación […]
Instrumento médico de vástago con una placa de apoyo / puente en el riel de retención, del 6 de Mayo de 2020, de AESCULAP AG: Instrumento médico de vástago , con una cabeza de instrumento que presenta una pieza de boca con dos ramas de pieza de boca que pueden moverse a […]
Dispositivos para aplicar pinzas quirúrgicas, del 27 de Noviembre de 2019, de Endodynamix, Inc: Un aparato de aplicación de pinzas quirúrgicas, que comprende: una carcasa ; un mecanismo impulsor que incluye una estructura de soporte […]
Dispositivo de pinzado de tejidos, del 30 de Octubre de 2019, de BOSTON SCIENTIFIC SCIMED, INC.: Un dispositivo de pinzado de tejidos, que comprende: un miembro flexible dimensionado para inserción a través de un canal […]
Instrumento médico de tipo vástago con diferentes distancias de posición de almacenamiento mediante elementos de arrastre de grapas y pestañas de retención para grapas, del 2 de Octubre de 2019, de AESCULAP AG: Instrumento médico de tipo vástago con un cabezal de instrumento para aplicar grapas , en el que el cabezal de instrumento puede unirse por medio de un vástago […]
 Clip quirúrgico, del 25 de Septiembre de 2019, de AESCULAP AG: Clip quirúrgico para un aplicador de clips quirúrgico con al menos una pareja de brazos de clip (2a, 2b, 2c, 2d), donde cada brazo de clip (2a, 2b, […]
Clip quirúrgico, del 25 de Septiembre de 2019, de AESCULAP AG: Clip quirúrgico para un aplicador de clips quirúrgico con al menos una pareja de brazos de clip (2a, 2b, 2c, 2d), donde cada brazo de clip (2a, 2b, […]
Dispositivo de pinzado de tejidos, del 18 de Septiembre de 2019, de BOSTON SCIENTIFIC SCIMED, INC.: Un aparato de pinzado de tejido que comprende: una pinza ; una cápsula , en la que un extremo proximal de la pinza se recibe dentro de la […]
Dispositivo de plicatura con elemento de fijación lineal conformable para su uso en el tratamiento de anuloplastia de plicatura directa de la regurgitación de la válvula mitral, del 17 de Abril de 2019, de Cardinal Health Switzerland 515 GmbH: Un sistema para el tratamiento de la regurgitación de la válvula mitral a través de la anuloplastia de plicatura directa de un paciente que comprende: un dispositivo de plicatura […]