MECANISMO PORTA-HERRAMIENTA.
Mecanismo porta-herramienta, para la sujeción y accionamiento de una herramienta (1) de mecanizado,
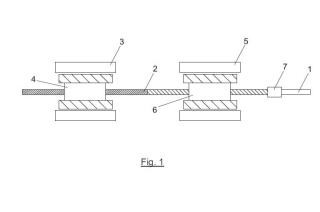
que tiene un eje (2) principal de accionamiento, al que se conectan de forma independiente un primer motor (3) para la rotación del eje (2), y un segundo motor (5) para el movimiento de avance del eje (2). El primer motor (3) se conecta al eje (2) mediante una conexión deslizante (4), mientras que el segundo motor (5) se conecta al eje (2) mediante una conexión helicoidal (6). Adicionalmente el eje (2) presenta un elemento de fijación (7) mediante el cual se fija a la herramienta (1).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331876.
Solicitante: ADVANCED ENGINEERING & INNOVATION.
Nacionalidad solicitante: España.
Inventor/es: CLAVEL,Alexandre, FRANGEARD,Didier.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q3/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › Dispositivos que permiten mantener, soportar o posicionar las piezas o las herramientas, pudiendo normalmente ser desmontados estos dispositivos de la máquina (mesas de trabajo u otras piezas, p. ej. platos, que no incorporan de forma habitual los medios para sujetar la pieza B23Q 1/00; control automático de la posición B23Q 15/00; cabezas portaherramientas rotativas para máquinas de tornear B23B 3/24, B23B 3/26; porta-herramientas sin accionamiento B23B 29/00; características generales de las torretas B23B 29/24; herramientas o útiles de banco para fijar, unir, desenganchar o mantener B25B).
Descripción:
Campo de la invención La presente invención pertenece al campo técnico de las herramientas utilizadas en cualquier sector industrial, tales como el sector aeronáutico, automoción o sector de la construcción, y más concretamente para operaciones de mecanizado que necesitan avance y giro de la herramienta, como la perforación y taladrado.
La invención se refiere en particular a un mecanismo porta-herramienta, para la sujeción y el accionamiento de herramientas de mecanizado con avance y giro, tales como herramientas de perforación, en el que dos motores se conectan de forma independiente a un eje, proporcionando a dicho uno de ellos movimiento de rotación y el otro de avance, consiguiendo con un único conjunto sin acoples ni mecanismos de conexión adicionales el movimiento de avance y rotación de la herramienta de mecanizado, de forma que se obtiene un movimiento equilibrado, compacto y preciso.
Antecedentes de la invención En la actualidad, en todos los sectores en los que es necesario realizar operaciones de mecanizado con avance y giro de la herramienta, tales como perforación o taladrado, se utilizan herramientas que se conectan a diversos mecanismos separados entre sí para conseguir los diferentes movimientos necesarios. Esto significa que se utilizan diferentes piezas que se acoplan a la herramienta de mecanizado, tales como el eje del movimiento, una conexión helicoidal, una conexión deslizante y el soporte para la herramienta. Estas piezas tienen funciones y especialidades distintas, y por tanto se fabrican y comercializan por separado, debiendo comprarse a proveedores distintos, lo que origina ineficiencias en la logística y el control. A esto se le debe añadir que para conseguir determinados movimientos de la herramienta de perforación se deben reunir todas estas piezas con numerosos órganos mecánicos de transmisión, lo que origina que el sistema no sea compacto, y que presente numerosas imprecisiones, tales vibraciones, incumplimientos de circularidad y concentricidad. Esto da lugar a un sistema no equilibrado que afecta a la calidad de la perforación.
Era por tanto deseable mecanismo que fuera capaz de proporcionar los movimientos necesarios para un mecanizado eficiente, evitando los inconvenientes existentes en los anteriores sistemas del estado de la técnica.
Descripción de la invención La presente invención resuelve los problemas existentes en el estado de la técnica mediante un mecanismo porta-herramienta, para la sujeción y accionamiento de una herramienta de mecanizado con avance y giro, para la realización de cualquier tipo de perforaciones o taladros en cualquier sector industrial. El mecanismo está formado por un eje principal de accionamiento, al que están conectados de forma independiente un primer motor que proporciona la rotación del eje, y un segundo motor que proporciona el movimiento de avance de dicho eje. El primer motor está conectado al eje mediante una conexión deslizante, mientras que el segundo motor está conectado al eje mediante una conexión helicoidal. Un elemento de fijación permite la fijación de la herramienta al eje principal de accionamiento. Esta conexión independiente de los dos motores de movimiento al eje consigue que la función para la rotación y la función para el avance de la herramienta estén separadas entre sí para simplificar la fabricación y los ajustes finales. Así, el movimiento de rotación de la herramienta se conseguirá con únicamente uno de los motores, y el de perforación, con avance, necesitará los dos motores. Preferentemente, el eje principal de accionamiento del mecanismo porta-herramienta puede disponer de una perforación longitudinal realizada a lo largo de toda su longitud para proporcionar la lubricación central de la herramienta. El hecho de que un único conjunto integral proporcione los movimientos necesarios para el giro con avance de la perforación, hace que ésta sea compacta, eliminándose ajustes y conexiones entre diferentes elementos, y con ello eliminando imprecisiones tales como vibraciones, y consiguiéndose un sistema equilibrado que cumple con los requerimientos de circularidad, concentricidad y tolerancias.
Breve descripción de los dibujos A continuación, para facilitar la comprensión de la invención, a modo ilustrativo pero no limitativo se describirá una realización de la invención que hace referencia a una figura. La figura 1 es una vista esquemática frontal de una realización de un mecanismo porta-herramienta objeto de la presente invención , que muestra sus elementos
principales. En esta figura se hace referencia a un conjunto de elementos que son:
1. herramienta
2. eje principal de accionamiento del mecanismo porta-herramienta
3. primer motor para la rotación del eje
4. conexión deslizante del primer motor al eje
5. segundo motor para el movimiento de avance del eje
6. conexión helicoidal del segundo motor al eje
7. elemento de fijación de la herramienta al eje 10
Descripción detallada de la invención El objeto de la presente invención es un mecanismo porta-herramienta, utilizado para la sujeción y el accionamiento de herramientas de mecanizado, concretamente para herramientas de mecanizado con giro y avance, tales como herramientas de perforación y taladrado. Tal y como se puede apreciar en la figura, el mecanismo porta-herramienta objeto de la presente invención, para la sujeción y accionamiento de una herramienta 1 de mecanizado, tiene un eje 2 principal de accionamiento, al que están conectados de forma independiente dos motores 3, 5.
Un primer motor 3 proporciona la rotación del eje 2, el cual a su vez proporciona el giro a la herramienta 1. Este primer motor 3 está conectado al eje 2 mediante una conexión deslizante 4. Un segundo motor 5 es el encargado de proporcionar el movimiento de avance del eje 2, el cual a su vez proporciona el avance a la herramienta 1. Este segundo motor 5
está conectado al eje 2 mediante una conexión helicoidal 6. El mecanismo porta-herramienta presenta adicionalmente un elemento de fijación 7, mediante el cual la herramienta 1 se fija al eje 2 principal de accionamiento. Preferentemente, el eje 2 principal de accionamiento tiene una perforación longitudinal a lo largo de toda su longitud, a través de la cual se realiza la lubricación central de la herramienta. De forma particular, la conexión deslizante 4 y la conexión helicoidal 6 del mecanismo porta-herramienta carecen de juego mecánico. Para cancelar el juego mecánico, se utilizan conexiones con precarga. Por ejemplo, en el caso de un husillo de bolas, se aumenta el diámetro de las bolas para eliminar el posible juego, yen el caso de husillo sin bolas, se pueden utilizar dos tuercas, una presionada contra la otra.
Según una realización concreta de la invención, el mecanismo porta-herramienta presenta una matriz de inercia diagonal, lo que permite un giro perfecto de la herramienta alrededor de su eje de giro, que coincide con el eje 2 principal de accionamiento del mecanismo, eliminándose vibraciones y problemas de circularidad y
concentricidad . Es decir, el mecanismo es cilíndrico y simétrico, lo que permite equilibrarlo estáticamente y dinámicamente. Esto se traduce matemáticamente hablando en una matriz de inercia diagonal, lo cual indica que no se producirán esfuerzos radiales ni momentos, y la máquina podrá presentar una alta velocidad de giro.
Una vez descrita de forma clara la invención, se hace constar que las realizaciones particulares anteriormente descritas son susceptibles de modificaciones de detalle siempre que no alteren el principio fundamental y la esencia de la invención.
Reivindicaciones:
1. Mecanismo porta-herramienta, para la sujeción y accionamiento de una herramienta (1) de mecanizado, caracterizado por que comprende 5 un eje (2) principal de accionamiento, al que están conectados de forma independiente un primer motor (3) para la rotación del eje (2) , conectado a dicho eje (2) mediante una conexión deslizante (4) , un segundo motor (5) para el movimiento de avance del eje (2) , conectado a 10 dicho eje (2) mediante una conexión helicoidal (6) ,
y un elemento de fijación (7) mediante el cual se fija la herramienta (1) al eje (2) principal de accionamiento.
2. Mecanismo porta-herramienta, según la reivindicación 1, caracterizado por que el eje (2) comprende una perforación longitudinal a lo largo de toda su longitud para la lubricación central de la herramienta.
3. Mecanismo porta-herramienta, según cualquiera de las reivindicaciones anteriores, caracterizado por que la conexión deslizante (4) Y la conexión helicoidal (6) 20 carecen de juego mecánico.
4. Mecanismo porta-herramienta, según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende una matriz de inercia diagonal.
Patentes similares o relacionadas:
Máquina de trabajo con dispositivo de sujeción, del 23 de Octubre de 2019, de Belotti S.p.A: Máquina de trabajo que comprende un cabezal de trabajo que tiene un husillo y que se puede mover en un espacio de trabajo xyz y que […]
Dispositivo universal para abrir y cerrar cafeteras de uso doméstico con cierre de rosca, del 8 de Abril de 2019, de PIEDROLA CORONEL, Miguel: 1. Dispositivo universal para abrir y cerrar cafeteras de uso doméstico con cierre de rosca que consiste en un útil destinado a facilitar las operaciones […]
Dispositivo de chaflán para el mecanizado de una superficie de cordón de soldadura que permite el ajuste de la cantidad de chaflanado de un solo toque, del 10 de Diciembre de 2018, de Daesung Golden Technology Co. Ltd: Máquina de achaflanado para procesar una superficie de cordón de soldadura, que es capaz de controlar la profundidad de corte de chaflán mediante una operación de un solo toque, […]
Centro de mecanizado, del 26 de Noviembre de 2018, de HOLZ-HER GmbH: 1. Centro de mecanizado para mecanizar piezas de trabajo en forma de tablero de madera o de materiales que sustituyen a la madera, con […]
DISPOSITIVO DE MECANIZADO DE SUPERFICIES LAMINARES CURVAS, del 11 de Septiembre de 2017, de TORRES MARTINEZ,MANUEL: Dispositivo de mecanizado de superficies laminares curvas que comprende: - una primera parte que tiene una herramienta para mecanizar […]
DISPOSITIVO DE MECANIZADO DE SUPERFICIES LAMINARES CURVAS, del 17 de Agosto de 2017, de TORRES MARTINEZ,MANUEL: Dispositivo de mecanizado de superficies laminares curvas que comprende: - una primera parte que tiene una herramienta para mecanizar la cara cóncava […]
Plataforma para desplazar muebles y similares, del 25 de Mayo de 2016, de CAVAS MARTINEZ, Francisco: 1. Plataforma para desplazar muebles y similares, sobre una base rígida con ruedas y ejes que las soportan. Caracterizado porque : La plataforma fija aloja en su plano […]
Mecanismo de fijación y liberación para tuberías preforma en un molde, del 28 de Diciembre de 2015, de MOLECOR TECNOLOGÍA, S. L: Este mecanismo ofrece una solución simple por la cual y medianteun desplazamiento axial de una pieza ranurada , se provoca undesplazamiento radial de unas bolas […]