MECANISMO PARA MOVER LAS EXTREMIDADES INFERIORES DE UNA FIGURA DE JUGUETE.
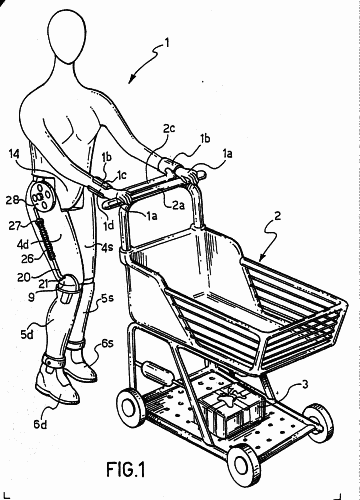
Mecanismo para mover las extremidades inferiores conectadas al cuerpo (15) de una figura de juguete (1) con el fin de permitir que dicha figura de juguete camine sobre una superficie de soporte (P) de un modo similar al ser humano,
en el que cada extremidad incluye una parte en forma de muslo (4d, 4s), una parte en forma de parte inferior de la pierna (5d, 5s) conectada al extremo adyacente de la parte en forma de muslo por medio de una articulación de rodilla (7), y una parte en forma de pie (6d, 6s) conectada a la parte en forma de parte inferior de la pierna (5d, 5s) por medio de una articulación de tobillo (8), y en el que se conecta un medio de accionamiento (32, 34, 35d, 35s, 28d, 28s), albergado en un compartimento (31) del cuerpo (15) de la figura de juguete, a la parte en forma de muslo (4d, 4s) con el fin de dotarla de un movimiento pivotante en un plano vertical paralelo a la dirección en la cual se hace caminar a la figura, y de un movimiento de traslación rectilíneo en la dirección del eje longitudinal de la parte en forma de muslo entre una posición inferior de punto muerto y una posición superior de punto muerto y viceversa, estando los movimientos relacionados con una extremidad desfasados en 180° respecto a los movimientos homólogos de la otra extremidad y estando la figura de juguete provista de medios (2, 3) para contrarrestar el par de reacción generado por los medios de accionamiento durante el movimiento de la parte en forma de muslo (4d, 4s), caracterizado porque comprende un elemento en forma de barra (20) que se extiende a lo largo de la parte en forma de muslo (4d, 4s), estando provisto dicho elemento en forma de barra (20) de un extremo (21) conectado a un punto (22) de la parte en forma de parte inferior de la pierna (5d, 5s) situado hacia el hueco (23) de la rodilla, en relación con el eje (10) de la articulación de rodilla (7), y el extremo opuesto (24) acoplado de forma que se pueda deslizar libremente en un hueco (25) con un extremo cerrado (25a) formado en el cuerpo (15) de la figura de juguete, así como un elemento elástico (26) acoplado entre un punto (27) a lo largo de la longitud del elemento en forma de barra (20) y un punto (16) fijo en relación con la parte en forma de muslo (4d, 4s), actuando el elemento elástico (26) sobre el elemento en forma de barra (20) para forzar al extremo libre del mismo hacia el extremo (25a) del hueco axial (25).
Tipo: Resumen de patente/invención.
Solicitante: GIOCHI PREZIOSI LUSSEMBURGO S.A.
Nacionalidad solicitante: Luxemburgo.
Dirección: 23, RUE BEAUMONT,1219 LUXEMBOURG.
Inventor/es: MIGLIORATI, SOSTENE, GIOCHI PREZIOSI LUSSEMBURGOS.
Fecha de Publicación: .
Fecha Concesión Europea: 12 de Noviembre de 2003.
Clasificación Internacional de Patentes:
- A63H11/18 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63H JUGUETES, p. ej. TROMPOS, MUÑECOS, AROS O JUEGOS DE CONSTRUCCION. › A63H 11/00 Figuras que se desplazan por sí mismas. › Figuras que realizan un movimiento natural de marcha.
Patentes similares o relacionadas:
 Robot humanoide jugador, método y sistema de utilización de dicho robot, del 4 de Diciembre de 2015, de Aldebaran Robotics: Robot humanoide que comprende al menos un procesador configurado para que el robot se desplace sobre unos miembros inferiores, efectúe movimientos de miembros […]
Robot humanoide jugador, método y sistema de utilización de dicho robot, del 4 de Diciembre de 2015, de Aldebaran Robotics: Robot humanoide que comprende al menos un procesador configurado para que el robot se desplace sobre unos miembros inferiores, efectúe movimientos de miembros […]
ACTUADOR PARA MOVIMIENTO DE ARRANQUE -PARADA, PRINCIPALMENTE EN ROBOTSCAMINANTES, Y EL PROCEDIMIENTO PARA SU CONTROL., del 16 de Marzo de 2005, de CONSEJO SUP. INVESTIG. CIENTIFICAS: Actuador para movimientos de arranque-parada, principalmente en robots caminantes, y el procedimiento para su control. Actuador para movimientos […]
CONJUNTO DE MOVIMIENTO, PARTICULARMENTE PARA LAS PIERNAS DE UNA MUÑECA., del 1 de Mayo de 2004, de GIOCHI PREZIOSI S.P.A.: UN ENSAMBLAJE DE MOVIMIENTO, EN PARTICULAR PARA LAS PIERNAS DE UNA MUÑECA INCLUYE UNA TRANSMISION ACCIONADA POR ENGRANAJE, EN LA QUE LA RUEDA EXTREMA, ACOPLADA […]
ACTUADOR PARA LAS PIERNAS DE UN ROBOT CAMINANTE., del 16 de Octubre de 2003, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Actuador para las piernas de un robot caminante. El actuador para las piernas de un robot caminante, en su mayor parte robots bípedos, con un elemento […]
MODELO MECANICO DE UN ANIMAL, del 16 de Enero de 2002, de STADLBAUER, ANDREAS: LA INVENCION SE REFIERE A UN MODELO MECANICO DE UN ANIMAL, ESPECIALMENTE UN PERRO DE JUGUETE CON PATAS DELANTERAS Y PATAS TRASERAS QUE SE ENCUENTRAN DISPUESTAS […]
MECANISMO DE MOVIMIENTO, EN PARTICULAR, PARA JUGUETES., del , de NUOVA CEPPI RATTI S.P.A.: UN MECANISMO DE MOVIMIENTO PARA JUGUETES, PARTICULARMENTE PARA MOVER LAS PIERNAS DE UNA MUÑECA O UN TITERE CON UN MOVIMIENTO ANGULAR ALTERNO SIMILAR AL PASEO, […]
MUÑECO ANDADOR PERFECCIONADO., del 1 de Marzo de 1999, de MIJER, S.A.: MUÑECO ANDADOR PERFECCIONADO. SE PROPORCIONA UN MUÑECO CON PIERNAS DE MUÑECO RIGIDAS IMPULSADAS CON UN MOVIMIENTO DE VAIVEN, UN DISPOSITIVO […]
 MUÑECA ANDADORA, del 16 de Julio de 1972, de GIROUD,GERMAIN: Muñeca andadora, del tipo en el cual la parte superior del cuerpo está animada de un movimiento alternativo de balanceo lateral con respecto a la parte inferior […]
MUÑECA ANDADORA, del 16 de Julio de 1972, de GIROUD,GERMAIN: Muñeca andadora, del tipo en el cual la parte superior del cuerpo está animada de un movimiento alternativo de balanceo lateral con respecto a la parte inferior […]