MECANISMO DE CINEMÁTICA PARALELA CON ARTICULACIÓN ESFÉRICA CONCÉNTRICA.
Un mecanismo para posicionar y orientar un componente final en el espacio con al menos cinco grados de libertad,
comprendiendo el mecanismo: una base (1); una primera extremidad actuador (A1) que comprende al menos una plataforma (11) conectada a dicha base (1) por una articulación angular (10) permitiendo un grado de libertad giratorio alrededor de un eje central (1a), un primer elemento de extremidad (13) conectado de forma móvil a dicha plataforma con un solo grado de libertad accionado con relación a dicha plataforma, un actuador (101) para accionar dicho primer elemento de extremidad con relación a dicha plataforma, y un segundo elemento de extremidad (15) conectado de forma móvil a dicho primer elemento de extremidad, teniendo dicho segundo elemento de extremidad al menos tres grados de libertad con relación a dicha base, en el que al menos uno de dichos grados de libertad de dicho segundo elemento de extremidad es accionable con relación a dicha base; al menos una segunda, tercera, cuarta y quinta extremidad actuador (A2, A3, A4, A5), comprendiendo cada una de las extremidades actuador al menos un brazo actuador (3) conectado de forma giratoria a dicha base mediante una articulación angular accionada (2) que permite el giro alrededor de un respectivo eje actuador (1a, 2a, 2b), un actuador para accionar dicho brazo actuador con relación a dicha base, comprendiendo además cada una de la segunda, tercera, cuarta y quinta extremidad actuador un antebrazo (5) conectado de forma móvil a dicho brazo actuador de la respectiva extremidad actuador, en el que dicho antebrazo presenta al menos tres grados de libertad con relación a dicho brazo actuador incluyendo un grado de libertad giratorio libre alrededor de un respectivo eje de antebrazo (5a); un primer cuerpo de articulación (20, 24, 25), en el que dicho segundo elemento de extremidad está conectado de forma giratoria a dicho primer cuerpo de articulación y permite el giro con relación a dicho primer cuerpo de articulación alrededor de un primer eje de articulación (20a, 24a, 25a), y en que cada uno de los antebrazos de dichas segunda y tercera extremidad actuador está conectado de forma giratoria a dicho primer cuerpo de articulación y permite el giro relativo a dicho primer cuerpo de articulación alrededor de un respectivo segundo y tercer eje de articulación (20b, 24b, 24c, 7a, 7b) que no es paralelo a dicho eje de antebrazo de la respectiva extremidad actuador; un segundo cuerpo de articulación (30, 26), en el que cada uno de los antebrazos de dichas cuarta y quinta extremidad actuador está conectado de forma giratoria a dicho segundo cuerpo de articulación y permite el giro con relación a dicho segundo cuerpo de articulación alrededor de un respectivo cuarto y quinto eje de articulación (30b, 7d, 7c) que no es paralelo a dicho eje de antebrazo de la respectiva extremidad actuador; y comprendiendo también el mecanismo dicho componente final (40, 40a, 40b) conectado de forma móvil a cada uno de dicho primer y segundo cuerpo de articulación, teniendo el componente final al menos dos grados de libertad giratorios con relación a dichos primer y segundo cuerpo de articulación tal que dicho componente final puede moverse con al menos cinco grados de libertad con relación a dicha base
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2004/020755.
Solicitante: MERZ, MICHAEL.
Nacionalidad solicitante: Alemania.
Dirección: SIMON-DACH-STRASSE 9 10245 BERLIN ALEMANIA.
Inventor/es: ROY,SHAMBHU NATH, MERZ,MICHAEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Junio de 2004.
Fecha Concesión Europea: 29 de Septiembre de 2010.
Clasificación PCT:
- B23Q1/54 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › con sólo dos pares de rotación.
- B25J17/00 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Uniones.
- B25J17/02 B25J […] › B25J 17/00 Uniones. › Uniones articuladas.
- B66C1/00 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › Elementos o dispositivos de toma de carga fijados a los mecanismos de subida, bajada o arrastre de las grúas o adaptados para ser utilizados con estos mecanismos y transmitir los esfuerzos a los objetos o grupos de objetos (medios para unir cables o cuerdas F16G 11/00).
- B66C3/00 B66C […] › Elementos o dispositivos de toma de carga fijados a los mecanismos de subida o bajada de las grúas o adaptados para ser utilizados con ellos y destinados principalmente a transmitir fuerzas para el levantamiento de material a granel; Cucharas cogedoras (tolvas u otros receptáculos B65D, p. ej. pallets B65D 19/00; dragas equipadas con cucharas E02F).
Clasificación antigua:
- B25J17/00 B25J […] › Uniones.
- B25J17/02 B25J 17/00 […] › Uniones articuladas.
- B66C1/00 B66C […] › Elementos o dispositivos de toma de carga fijados a los mecanismos de subida, bajada o arrastre de las grúas o adaptados para ser utilizados con estos mecanismos y transmitir los esfuerzos a los objetos o grupos de objetos (medios para unir cables o cuerdas F16G 11/00).
- B66C3/00 B66C […] › Elementos o dispositivos de toma de carga fijados a los mecanismos de subida o bajada de las grúas o adaptados para ser utilizados con ellos y destinados principalmente a transmitir fuerzas para el levantamiento de material a granel; Cucharas cogedoras (tolvas u otros receptáculos B65D, p. ej. pallets B65D 19/00; dragas equipadas con cucharas E02F).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre.
Fragmento de la descripción:
ANTECEDENTES
La presente invención se refiere en general a un aparato con múltiples extremidades para posicionar y orientar un 5 componente final en el espacio y articulaciones para unir las
extremidades de dicho aparato.
Existe una necesidad de mecanismos cinemáticos paralelos efectivos y simples. Mecanismos cinemáticos se utilizan en aplicaciones de ingeniería mecánica para el mecanizado, robótica, dispositivos de posicionamiento, medición de coordenadas, mecanismos, etc. En general, los mecanismos pueden clasificarse como en serie o en paralelo. Mecanismos cinemáticos en serie son ampliamente utilizados y dominan hoy en día el mercado.
15 Un mecanismo cinemático en serie presenta una serie de vigas voladizas que están conectadas de forma móvil conjuntamente de una forma extremo con extremo mediante articulaciones esféricas o angulares, prismáticas, formando un bucle abierto. Cuanto más cerca está un elemento a una base del mecanismo dentro de la estructura en serie, mayor es la carga sobre ese elemento. Adicionalmente, cuanto más lejos está un elemento de la base, mayor es su deflexión respecto al elemento base. Cuando un mecanismo cinemático en serie está sometido a carga, la posición del elemento más alejado, es decir, el elemento terminal, está sometido a las deflexiones acumuladas de todos los elementos en serie. Esto da lugar a grandes errores de posicionamiento en el elemento terminal. Estando construido de voladizos, un mecanismo en serie tiene un ratio de rigidez a la masa pobre, haciendo dichas estructuras con un diseño voluminoso.
Mecanismos cinemáticos en serie permiten un cálculo rápido y sencillo de la posición del elemento terminal dada la posición o estado de todos los actuadores. En general, este cálculo es conocido como cinemática directa de un mecanismo. Sin embargo, determinar la posición o estado de todos los actuadores dada la posición del elemento terminal, también conocida como la cinemática inversa, resulta generalmente difícil.
Con relación a los mecanismos cinemáticos en serie, mecanismos cinemáticos paralelos presentan habitualmente un ratio de rigidez a la masa mejorado, mejor precisión, propiedades dinámicas superiores y pueden moverse a velocidades y aceleraciones más altas. Un mecanismo cinemático paralelo presenta una pluralidad de articulaciones que forman uno o más bucles cerrados, por lo que las articulaciones comparten la carga sobre el elemento terminal. Articulaciones de dicho mecanismo experimentan habitualmente solamente fuerzas de compresión o tracción que permiten el uso de material más barato y diseños de articulaciones más simples. Además, errores de posicionamiento de actuadores habitualmente se dividen, dando lugar por ello a una alta precisión del elemento terminal. Un mecanismo cinemático paralelo bien conocido es la plataforma Stewart-Gough que fue introducida en 1965 y ha estado desde entonces sometida a un extenso estudio y análisis. Un mecanismo de plataforma Stewart-Gough incluye por lo general una plataforma movible que está conectada a una base por seis articulaciones controlables. Por ejemplo, la patente americana nº 5,179,525 describe una visión general de mecanismos que están basados o derivados de la plataforma Stewart-Gough.
Mientras que mecanismos cinemáticos paralelos pueden proporcionar precisión mejorada, rigidez, y capacidad de llevar altas cargas, también sufren inconvenientes de control significantes. La mayoría de mecanismos cinemáticos paralelos tienen cinemáticas directas muy difíciles. Las soluciones de las cinemáticas directas tienen la forma de ecuaciones polinómicas de grande orden, que no permiten soluciones de forma cerrada para calcular la posición del elemento terminal. Métodos de cálculo intensivos tales como aproximaciones numéricas deben aplicarse para calcular múltiples soluciones y seleccionar el correcto. Por ejemplo, se ha mostrado que la forma general de la plataforma Stewart-Gough tiene catorce soluciones factibles. Para algunas formas especiales de la plataforma Stewart-Gough, soluciones de forma cerrada de la cinemática directa existen. En estas formas especiales, pares y triples de articulaciones esféricas que conectan las articulaciones a la base y la plataforma son concéntricas. Sin embargo, la dificultad de fabricar tales articulaciones es bien reconocida en la técnica.
Mecanismos del tipo Stewart-Gough habitualmente permiten el posicionamiento y orientación de la plataforma movible con seis grados de libertad. En general, la posición y orientación de la plataforma se acoplan lo cual complica los controles. Además, debido a las singularidades en el espacio de trabajo y el rango de trabajo restringido de las articulaciones y actuadores, la translación y en particular el rango de movimiento giratorio de la plataforma está significativamente limitado. Sin embargo, muchas aplicaciones, tales como mecanizado u operaciones de montaje, requieren un accionamiento alrededor de un eje con múltiples
o infinitas rotaciones, que habitualmente se lleva a cabo por motores o ejes adicionales montados en el elemento terminal. Esto significa que uno de los accionamientos de estos mecanismos es redundante. Además, muchas aplicaciones, tales como operaciones de montaje flexible o mecanizado con 5 ejes, requieren una gran capacidad de orientación del elemento terminal.
Por lo tanto, se han propuesto mecanismos de cinemática paralela alternativos. Por ejemplo, la patente americana nº 4,776,749 describe un dispositivo robótico con solamente cinco elementos de posicionamiento accionados para posicionar y orientar una herramienta de trabajo en el espacio. El dispositivo utiliza dos articulaciones de rótula concéntricas, la primera de las cuales conecta tres y la segunda de las cuales conecta los dos elementos de posicionamiento accionados restantes en un respectivo primer y segundo punto común. Por ello, el dispositivo forma una configuración bi-tetraédrico que desacopla el posicionamiento y orientación de la herramienta de trabajo. Mientras que esta configuración facilita la rigidez estructural y una solución con forma cerrada de la cinemática directa, el diseño de la articulación concéntrica limita significativamente la libertad giratoria de cada elemento de posicionamiento. Además, tales articulaciones limitan el grado de orientación de la herramienta de trabajo y son difíciles de fabricar de una forma precisa y con un coste efectivo.
Para llevar a cabo una estructura bi-tetraédrica rígida del mecanismo y una cinemática directa simple, se han propuesto articulaciones alternativas para conectar tres o más extremidades con movimiento esférico alrededor de un punto común. Por ejemplo, la patente americana nº 5,657,584 describe una articulación que utiliza un gran número de elementos y pines para producir movimiento esférico de las extremidades unidas, dando lugar a una estructura compleja y costosa. Tal articulación no es capaz de llevar grandes cargas y solamente ofrece movimiento esférico limitado a sus extremidades.
Otro mecanismo de cinemática paralela sin un sexto actuador redundante se describe en DE 198 40 886 A1. Cinco uniones con codos accionados están conectadas con juntas universales separadas en una plataforma movible que puede posicionarse y orientarse en el espacio. La plataforma movible sirve como la unión central que conecta todas las articulaciones de codo para formar bucles cerrados. La disposición simplifica el diseño de la articulación, pero tampoco permite una solución de forma cerrada de la cinemática directa ni el desacoplamiento de la posición y orientación de la plataforma movible. La disposición ya no forma una estructura bi-tetraédrica rígida. Adicionalmente, en comparación con la plataforma Stewart-Gough el mecanismo se dice que solamente mejora ligeramente la capacidad de orientación de la plataforma movible.
Aún otro mecanismo cinemático paralelo con cinco uniones accionadas está presente en DE 101 53 854 C1. Similar al dispositivo anteriormente mencionado, se proporciona un diseño de articulación simplificado que consta de cinco pares de articulaciones con un solo eje con una línea común de giro que mejora la fabricación del mecanismo. Sin embargo, la disposición tampoco permite una solución de forma cerrada del problema de la cinemática directa ni el desacoplamiento de la posición y orientación del elemento terminal. Además, se...
Reivindicaciones:
1. Un mecanismo para posicionar y orientar un componente final en el espacio con al menos cinco grados de libertad, comprendiendo el mecanismo:
una base (1);
una primera extremidad actuador (A1) que comprende al menos una plataforma (11) conectada a dicha base (1) por una articulación angular (10) permitiendo un grado de libertad giratorio alrededor de un eje central (1a), un primer elemento de extremidad (13) conectado de forma móvil a dicha plataforma con un solo grado de libertad accionado con relación a dicha plataforma, un actuador (101) para accionar dicho primer elemento de extremidad con relación a dicha plataforma, y un segundo elemento de extremidad (15) conectado de forma móvil a dicho primer elemento de extremidad, teniendo dicho segundo elemento de extremidad al menos tres grados de libertad con relación a dicha base, en el que al menos uno de dichos grados de libertad de dicho segundo elemento de extremidad es accionable con relación a dicha base;
al menos una segunda, tercera, cuarta y quinta extremidad actuador (A2, A3, A4, A5), comprendiendo cada una de las extremidades actuador al menos un brazo actuador (3) conectado de forma giratoria a dicha base mediante una articulación angular accionada (2) que permite el giro alrededor de un respectivo eje actuador (1a, 2a, 2b), un actuador para accionar dicho brazo actuador con relación a dicha base, comprendiendo además cada una de la segunda, tercera, cuarta y quinta extremidad actuador un antebrazo (5) conectado de forma móvil a dicho brazo actuador de la respectiva extremidad actuador, en el que dicho antebrazo presenta al menos tres grados de libertad con relación a dicho brazo actuador incluyendo un grado de libertad giratorio libre alrededor de un respectivo eje de antebrazo (5a);
un primer cuerpo de articulación (20, 24, 25), en el que dicho segundo elemento de extremidad está conectado de forma giratoria a dicho primer cuerpo de articulación y permite el giro con relación a dicho primer cuerpo de articulación alrededor de un primer eje de articulación (20a, 24a, 25a), y en que cada uno de los antebrazos de dichas segunda y tercera extremidad actuador está conectado de forma giratoria a dicho primer cuerpo de articulación y permite el giro relativo a dicho primer cuerpo de articulación alrededor de un respectivo segundo y tercer eje de articulación (20b, 24b, 24c, 7a, 7b) que no es paralelo a dicho eje de antebrazo de la respectiva extremidad actuador;
un segundo cuerpo de articulación (30, 26), en el que cada uno de los antebrazos de dichas cuarta y quinta extremidad actuador está conectado de forma giratoria a dicho segundo cuerpo de articulación y permite el giro con relación a dicho segundo cuerpo de articulación alrededor de un respectivo cuarto y quinto eje de articulación (30b, 7d, 7c) que no es paralelo a dicho eje de antebrazo de la respectiva extremidad actuador; y
comprendiendo también el mecanismo dicho componente final (40, 40a, 40b) conectado de forma móvil a cada uno de dicho primer y segundo cuerpo de articulación, teniendo el componente final al menos dos grados de libertad giratorios con relación a dichos primer y segundo cuerpo de articulación tal que dicho componente final puede moverse con al menos cinco grados de libertad con relación a dicha base.
2. Un mecanismo según la reivindicación 1, en el que el respectivo eje actuador de cada una de dicha segunda y tercera extremidad actuador es sensiblemente coincidente con dicho eje central (1a).
3. Un mecanismo según la reivindicación 1, en el que el respectivo eje actuador de cada una de dicha cuarta y quinta extremidad actuador es sensiblemente paralelo con dicho eje central (1a).
4. Un mecanismo según la reivindicación 1, en el que el respectivo eje actuador de cada una de dicha cuarta y quinta extremidad actuador es sensiblemente coincidente con dicho eje central (1a).
5. Un mecanismo según la reivindicación 1, en el que dichos segundo y tercer eje de articulación (20b, 7a, 7b) son sensiblemente paralelos entre sí y perpendiculares a dicho primer eje de la articulación (20a, 25a).
6. Un mecanismo según la reivindicación 1, en el que dichos segundo y tercer ejes de articulación (20b) son sensiblemente coincidentes y perpendiculares a dicho primer eje de articulación (20a) y en el que dichos primer, segundo y tercer eje de articulación y los ejes de los antebrazos
(5a) de dichas segunda y tercera extremidades actuador atraviesan un primer punto común (P1).
7. Un mecanismo según la reivindicación 1, en el que dichos cuarto y quinto eje de articulación (30b, 7d, 7c) son sensiblemente paralelos entre sí.
8. Un mecanismo según la reivindicación 1, en el que dichos cuarto y quinto eje de articulación (30b) son sensiblemente coincidentes y en el que dichos cuarto y quinto eje de articulación y ejes del antebrazo (5a) de dichas cuarta y quinta extremidades actuador atraviesan un segundo punto común (P2).
9. Un mecanismo según la reivindicación 1, en el que dicho primer elemento de extremidad (13) está conectado a dicha plataforma (11) mediante una articulación angular accionada (12) permitiendo el giro alrededor de un eje principal (12a), y dicho segundo elemento de extremidad (15) está conectado a dicho primer elemento de extremidad mediante una articulación angular permitiendo el giro alrededor de un eje secundario (14a), y en el que dicho eje principal, dicho eje secundario, y dicho primer eje de articulación (20a, 24a, 25a) son sensiblemente paralelos entre sí y perpendiculares a dicho eje central (1a).
10. Un mecanismo según la reivindicación 1, en el que dicho componente final (40, 40a, 40b) está conectado a dicho primer cuerpo de articulación por un primera (22) y segunda
(23) articulación angular en serie permitiendo el giro alrededor de los respectivos primer y segundo eje angular (23a), y en el que dicho componente final está conectado a dicho segundo cuerpo de articulación por una tercera (32) y una cuarta (33) articulación angular en serie permitiendo el giro alrededor de los respectivos tercer y cuarto eje angular (33a).
11. Un mecanismo según la reivindicación 10, en el que dicho primer eje angular es sensiblemente coincidente con dicho primer eje de articulación (20a, 24a, 25a), y en el que dicho segundo eje angular (23a) es perpendicular a dicho primer eje angular e intersecciona con dicho primer eje angular y dicho eje central (1a), y en el que dicho cuarto eje angular (33a) es perpendicular a dicho tercer eje angular e intersecciona con dicho tercer eje angular.
12. Un mecanismo según la reivindicación 1, en el que dicho antebrazo (5) y dicho brazo actuador (3) de al menos una de dichas segunda, tercera, cuarta y quinta extremidad actuador (A2, A3, A4, A5) están conectados por tres articulaciones angulares en serie (72, 73, 75), teniendo dichas articulaciones angulares ejes de giro que
interseccionan y mutuamente no paralelos (72a, 73a, 75a).
13. Un mecanismo según la reivindicación 1, en el que dicho antebrazo (5) y dicho brazo actuador (3) de al menos una de dichas segunda, tercera, cuarta y quinta extremidades actuador (A2, A3, A4, A5) están conectados por una rótula (4).
14. Un mecanismo según la reivindicación 1, que comprende además una herramienta de trabajo (44, 49, 50) montada de forma móvil en dicho componente final (40, 40a, 40b) para el movimiento accionable relativo a éste.
15. Un mecanismo según la reivindicación 14, que comprende además un actuador (45) montado en dicha base (1, 1b) y unido de forma operativa a dicha herramienta de trabajo (49, 50), accionando dicho actuador dicha herramienta de trabajo para moverse con relación a dicho componente final (40a, 40b).
16. Un mecanismo según la reivindicación 14, que comprende además un actuador (42) montado en dicho componente final (40) y unido de forma operativa a dicha herramienta de trabajo (44), accionando dicho actuador dicha herramienta de trabajo para moverse con relación a dicho componente final.
17. Un mecanismo según la reivindicación 1, en el que el antebrazo (5) de cada una de dichas segunda y tercera extremidad actuador (A2, A3) está conectado al respectivo brazo actuador (3) con tres grados de libertad giratorios alrededor de un punto de conexión, y en el que los puntos de conexión de dichas segunda y tercera extremidad actuador se mueven sensiblemente en el mismo plano.
18. Un mecanismo según la reivindicación 1, en el que dicho segundo elemento de extremidad (15) está conectado a dicho primer cuerpo de articulación (20, 24, 25) mediante una articulación angular (17) permitiendo el giro alrededor de dicho primer eje de articulación (20a, 24a, 25a), y en el que los antebrazos (5) de dichas segunda y tercera extremidad actuador (A2, A3) están conectados a dicho primer cuerpo de articulación (20, 24, 25) por respectivas articulaciones angulares (7, 9) permitiendo el giro alrededor de dichos segundo y tercer eje de articulación (20b, 24b, 24c, 7a, 7b),
y en el que los antebrazos (5) de dichas cuarta y quinta extremidad actuador (A4, A5) están conectados a dicho segundo cuerpo de articulación (30, 26) por respectivas articulaciones angulares (7) permitiendo el giro alrededor de dichos cuarto y quinto eje de articulación (30b, 7d, 7c).
19. Un mecanismo según la reivindicación 1, que comprende además medios de influencia (L1, L2, L3), apretando dichos medios de influencia dicha plataforma (11) para girarla alrededor de dicho eje central (1a) por al menos uno de los brazos actuador (3) de dicha segunda y tercera extremidad actuador (A2, A3).
20. Un mecanismo según la reivindicación 1, que comprende además medios de influencia (L1, L2, L3), apretando dichos medios de influencia dicha plataforma (11) para girarla alrededor de dicho eje central (1a) tal que los brazos actuador (3) de dicha segunda y tercera extremidad actuador (A2, A3) permanecen a una distancia angular sensiblemente igual desde dicho primer elemento de extremidad (13).
21. Un mecanismo según la reivindicación 20, en el que dichos medios de influencia (L1, L2) comprenden:
un brazo de guía (94, 99) conectado de forma giratoria a dicha plataforma (11) por una articulación angular (95) permitiendo un grado de libertad giratorio; y
un primer y segundo brazo de influencia (92, 98) conectado de forma pivotante al brazo actuador (3) de una respectiva de dicha segunda y tercera extremidad actuador (A2, A3) por primeras articulaciones de influencia (91) permitiendo al menos dos grados de libertad giratorios, estando además cada uno de dicho primer y segundo brazo de influencia conectado de forma pivotante a dicho brazo de guía por segundas articulaciones de influencia (93, 97) permitiendo al menos dos grados de libertad giratorios.
22. Un mecanismo según la reivindicación 21, en el que al menos una de dicha primera y segunda articulación de influencia (91, 93, 97) es una rótula.
23. Un mecanismo según la reivindicación 21, en el que al menos una de dicha primera y segunda articulación de influencia (91, 93, 97) es una articulación universal.
24. Un mecanismo según la reivindicación 20, en el que dichos medios de influencia (L3) comprenden:
un primer brazo de guía (108) que está conectado de forma giratoria a dicha plataforma (11) por una articulación angular (109) permitiendo un grado de libertad giratorio;
un segundo brazo de guía (106) conectado de forma giratoria a dicho primer brazo de guía por una articulación angular (107) permitiendo un grado de libertad giratorio; y un primer y segundo brazo de influencia (104) conectado al brazo actuador (3) de un respectivo de dicha segunda y tercera extremidad actuador (A2, A3) por respectivas articulaciones angulares (103) permitiendo un grado de libertad giratorio, cada uno de dichos primer y segundo brazo de influencia estando además conectados de forma pivotante a dicho segundo brazo de guía por articulaciones universales
(105) permitiendo dos grados de libertad.
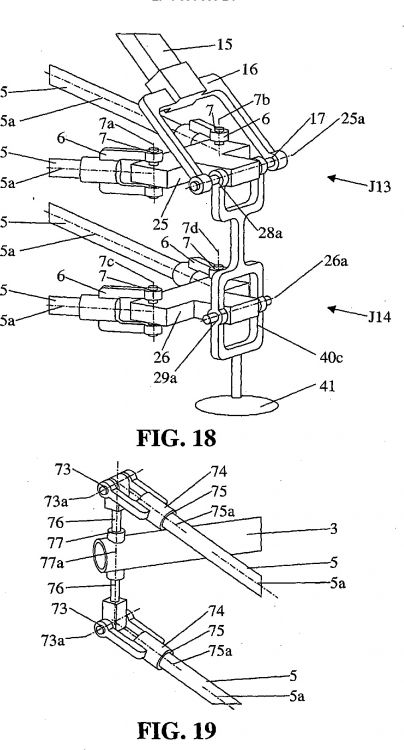
25. Un mecanismo (800) para posicionar y orientar un componente final (40c) en el espacio con al menos tres grados
de libertad, comprendiendo el mecanismo:
Una base (1);
una primera extremidad actuador (A11) que comprende al menos una plataforma (11) conectada a dicha base por una articulación angular (10) permitiendo un grado de libertad giratorio alrededor de un eje central (1a), un primer elemento de extremidad (13) conectado de forma móvil a dicha plataforma con un solo grado de libertad accionado con relación a dicha plataforma, un actuador (101) para accionar dicho primer elemento de extremidad con relación a dicha plataforma, y un segundo elemento de extremidad (15) conectado de forma móvil a dicho primer elemento de extremidad, teniendo dicho segundo elemento de extremidad al menos tres grados de libertad con relación a dicha base, en el que al menos uno de dichos grados de libertad de dicho segundo elemento de extremidad es accionable con relación a dicha base;
al menos una segunda y tercera extremidad actuador (A12, A13), comprendiendo cada una de las extremidades actuador al menos un brazo actuador (3) conectado de forma giratoria a dicha base mediante una articulación angular accionada (2) que permite el giro alrededor de un respectivo eje actuador, un actuador para accionar dicho brazo actuador con relación a dicha base, cada una de dicha segunda y tercera extremidad actuador comprende además un antebrazo superior e inferior
(5) conectado de forma móvil a dicho brazo actuador de la respectiva extremidad actuador, en el que cada uno de dichos antebrazos superior e inferior tiene al menos tres grados de libertad con relación a dicho brazo actuador incluyendo un grado de libertad giratorio libre alrededor de un respectivo eje de antebrazo superior e inferior (5a);
un primer cuerpo de articulación (20, 25), en el que dicho elemento de extremidad está conectado a dicho primer cuerpo de articulación por una articulación angular (17) permitiendo el giro alrededor de un primer eje de articulación (20a, 25a), y en el que cada antebrazo superior de dicha segunda y tercera extremidad actuador está conectado a dicho primer cuerpo de articulación por una articulación angular (7) permitiendo el giro alrededor de un respectivo segundo y tercer eje de articulación (20b, 7a, 7b) que no es paralelo a dicho eje del antebrazo superior de la respectiva extremidad actuador;
un segundo cuerpo articulación (30, 26), en el que cada uno de los antebrazos inferiores de dichas segunda y tercera extremidad actuador está conectado a dicho segundo cuerpo articulación por un articulación angular (7) permitiendo el giro alrededor de un respectivo cuarto y quinto eje de articulación (30b, 7d, 7c) que no es paralelo a dicho eje del antebrazo inferior de la respectiva extremidad actuador; y
dicho mecanismo comprende también dicho componente final (40c) conectado de forma móvil conectado a dicho primer y segundo cuerpo de articulación, teniendo el componente final al menos un grado de libertad giratorio con relación a dicho primer y segundo cuerpo de articulación tal que dicho componente final puede moverse con al menos tres grados de
libertad con relación a dicha base.
26. Un mecanismo según la reivindicación 25, en el que el respectivo eje actuador de cada una de dicha segunda y tercera extremidad actuador (A12, A13) es sensiblemente coincidente con dicho eje central (1a), y en el que cada uno de los antebrazos superiores (5) de dicha segunda y tercera extremidad actuador está conectado al respectivo brazo actuador (3) con tres grados de libertad giratorios alrededor de un respectivo primer punto de conexión, y en el que cada uno de los antebrazos inferiores (5) de dicha segunda y tercera extremidad actuador está conectado al respectivo brazo actuador (3) con tres grados de libertad giratorios alrededor de un respectivo segundo punto de conexión, y en el que dichos primeros puntos de conexión se mueven en un primer plano y dichos segundos puntos de conexión se mueven en un segundo plano sensiblemente paralelo a dicho primer plano.
27. Un mecanismo según la reivindicación 25, en el que dicho segundo y tercer eje de articulación (20b, 7a, 7b) son sensiblemente paralelos entre sí y perpendiculares a dicho primer eje de articulación (20a, 25a), y en el que dicho cuarto y quinto eje de articulación (30b, 7d, 7c) son sensiblemente paralelos entre sí.
28. Un mecanismo según la reivindicación 25, en el que dicho primer, segundo y tercer eje de articulación (20a, 20b) y los ejes del antebrazo superior (5a) de dicha segunda y tercera extremidad actuador (A12, A13) atraviesan un primer punto común (P1), y en el que dichos cuarto y quinto ejes de articulación (30b) y los ejes del antebrazo inferior (5a) de
dicha segunda y tercera extremidad actuador atraviesan un segundo punto común (P2).
29. Un mecanismo según la reivindicación 25, en el que dicho primer elemento de extremidad (13) está conectado a dicha plataforma (11) por una articulación angular (12) permitiendo el giro alrededor de un eje principal (12a), y dicho segundo elemento de extremidad (15) está conectado a dicho primer elemento de extremidad por una articulación angular (14) permitiendo el giro alrededor de un eje secundario (14a), y en el que dicho eje principal, dicho eje secundario y dicho primer eje de articulación (20a, 25a) son sensiblemente paralelos entre sí y perpendiculares a dicho eje central (1a).
30. Un mecanismo según la reivindicación 25, en el que dicho componente final (40c) está conectado a dicho primer cuerpo de articulación (20, 25) por una articulación angular (28a) permitiendo el giro alrededor de un primer eje angular (28b), y en el que dicho componente final está conectado a dicho segundo cuerpo de articulación (30, 26) por una articulación angular (29a) permitiendo el giro alrededor de un segundo eje angular (29b), en el que dicho primer y segundo eje angular y dicho primer eje de articulación (20a, 25a) son paralelos entre sí.
31. Un mecanismo según la reivindicación 25, en el que dicho componente final (40c) está conectado a dicho primer cuerpo de articulación (20, 25) por una articulación angular (28a) permitiendo el giro alrededor de un primer eje angular (28b), y en el que dicho componente final está conectado a
dicho segundo cuerpo de articulación (30, 26) por una articulación angular (29a) permitiendo el giro alrededor de un segundo eje angular (29b), en el que dicho primer y segundo eje angular son paralelos entre sí y en el que dicho primer eje angular coincide con dicho primer eje de articulación (20a, 25a).
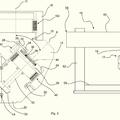
32. Un mecanismo según la reivindicación 25, en el que cada uno de dicho antebrazo superior e inferior (5) de al menos una de dichas segunda y tercera extremidad actuador (A12, A13) está conectado a dicho brazo actuador (3) por tres articulaciones angulares (72, 73, 75) en serie, teniendo dichas articulaciones angulares ejes de giro que interseccionan y mutuamente no paralelos (72a, 73a, 75a).
33. Un mecanismo según la reivindicación 25, en el que al menos una de dicha segunda y tercera extremidad actuador (A12, A13) comprende además una unión común (76) conectada a dicho brazo actuador (3) por una primera articulación angular (77), y en el que dicha unión común está conectada a cada uno de dichos antebrazos superior e inferior (5) por una segunda y tercera articulación angular (73, 75) en serie, teniendo dicha primera articulación angular y las respectivas segunda y tercera articulación angular ejes de rotación (73a, 75a, 77a) que interseccionan y mutuamente no paralelos.
34. Un mecanismo según la reivindicación 25, en el que cada uno de dicho antebrazo superior e inferior (5) de al menos una de dicha segunda y tercera extremidad actuador (A12, A13) está conectado a dicho brazo actuador (3) por una rótula (4).
35. Un mecanismo según la reivindicación 25, que comprende además una herramienta de trabajo (44, 49, 50) montada de forma móvil en dicho componente final (40c) para el movimiento accionable relativo a éste.
5 36. Un mecanismo según la reivindicación 25, que comprende además un actuador (45) montado en dicha base (1) y unido de forma operativa a dicha herramienta de trabajo (49, 50), accionando dicho actuador dicha herramienta de trabajo para moverse con relación a dicho componente final (40c).
10 37. Un mecanismo según la reivindicación 35, que comprende además un actuador (42) montado en dicho componente final (40c) y unido de forma operativa a dicha herramienta de trabajo (44), accionando dicho actuador dicha herramienta de trabajo para moverse con relación a dicho componente final.
15 38. Un mecanismo según la reivindicación 25, que comprende además medios de influencia (L1, L2, L3), empujando dichos medios de influencia dicha plataforma (11) para girar alrededor de dicho eje central (1a) tal que los brazos actuador (3) de la segunda y tercera extremidad actuador (A12, A13) permanecen a una distancia angular sensiblemente igual desde dicho primer elemento de extremidad (13).
Patentes similares o relacionadas:
Máquina herramienta, del 11 de Marzo de 2020, de Hüttmann, Martin: Máquina herramienta para el mecanizado de piezas de trabajo controlado por ordenador, con un soporte de máquina y al menos dos dispositivos […]
Amortiguador de masa ajustado montado sobre cabezal simétrico, del 27 de Noviembre de 2019, de Fives Machining Systems, Inc: Un amortiguador de masa ajustado montado en un cabezal de máquina herramienta , montado sobre el extremo de un brazo que tiene una […]
Máquina herramienta para la mecanización por arranque de virutas de una pieza de trabajo así como conjunto de soporte de husillo para el empleo en una máquina herramienta de este tipo, del 6 de Noviembre de 2019, de DECKEL MAHO PFRONTEN GMBH: Conjunto de soporte de husillo para el empleo en una máquina herramienta, con: - una sección de alojamiento del brazo articulado que se puede disponer o bien […]
Cabezal de mecanización de giro doble, del 26 de Marzo de 2019, de C.M.S. S.P.A.: Cabezal de mecanización de giro doble con dos ejes controlados (C; A), que comprende: - una primera unidad de control de un primer […]
Máquina herramienta con sistema de amortiguación activa, del 6 de Febrero de 2019, de SORALUCE, S. COOP: Máquina herramienta con sistema de amortiguación activa, comprendiendo • un carnero que tiene una estructura prismática hueca con unas paredes longitudinales […]
 Máquina herramienta que comprende un cabezal de mecanizado, del 27 de Diciembre de 2018, de BRETON, S.P.A.: Máquina herramienta que comprende un manguito y un cabezal de mecanizado , comprendiendo dicho cabezal de mecanizado:
un primer cuerpo conectado al manguito […]
Máquina herramienta que comprende un cabezal de mecanizado, del 27 de Diciembre de 2018, de BRETON, S.P.A.: Máquina herramienta que comprende un manguito y un cabezal de mecanizado , comprendiendo dicho cabezal de mecanizado:
un primer cuerpo conectado al manguito […]
Manipulador de baja inercia para máquinas de corte láser para metales laminares planos, del 28 de Marzo de 2018, de SALVAGNINI ITALIA S.P.A.: Máquina de corte láser para metales laminares planos dispuestos en un plano horizontal, que comprende un cabezal de corte láser y un manipulador con un eje X de movimiento […]
Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado y sistema, del 21 de Febrero de 2018, de ThyssenKrupp System Engineering GmbH: Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado para un manipulador, en particular en una calle de fabricación para la fabricación de carrocerías […]