Martillo neumático con elevación asistida.
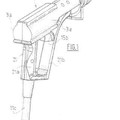
Una herramienta de percusión con motor integrada y elevación asistida (1),
que comprende:
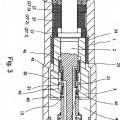
un cuerpo (10) vertical individual que comprende al menos dos diámetros longitudinales integrales, en donde un primer diámetro longitudinal integral es un diámetro (23) de percusión y en donde un segundo diámetro longitudinal integral es un primer diámetro (114) de accionamiento;
1un émbolo (21) de percusión contenido dentro del diámetro (23) de percusión del cuerpo (10) vertical individual; una herramienta (14) de trabajo fijada a la parte inferior de la herramienta de percusión con motor y elevación asistida (1);
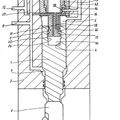
un primer émbolo (112) de elevación contenido dentro del primer diámetro (114) de activación del cuerpo (10) vertical individual y que divide el primer diámetro (114) de activación en una cámara (117) de elevación superior y una cámara (118) de retracción inferior;
un primer vástago (113) del émbolo de elevación conectado al primer émbolo (112) de elevación y que se extiende fuera del primer diámetro (114) de activación a través de una abertura en la cámara (118) de retracción inferior y que se extiende fuera del cuerpo (10) vertical individual a través de una abertura en el cuerpo (10) vertical individual, en donde el primer vástago (113) del émbolo de elevación además comprende un extremo exterior; un pie (15) de elevación conectado al extremo exterior del primer vástago (113) del émbolo de elevación;
una unidad (51) de control que comprende una válvula (310, 311, 312) de control direccional que tiene una posición de activación y una posición de desactivación; y caracterizada por que dispone de un medio de retracción del émbolo que proporciona una fuerza mantenida contra el primer émbolo (112) de elevación en una dirección ascendente cuando la válvula (310, 311, 312) de control está en la posición de desconexión y, por lo tanto, mantiene el pie (15) de elevación en una posición retraída cuando la herramienta (14) de trabajo está engranada en una superficie de trabajo;
en donde el primer vástago (113) del émbolo de elevación se extiende cuando la válvula (310, 311, 312) de control está en la posición de activación y, por lo tanto eleva la herramienta (14) de trabajo de la superficie de trabajo, y en donde el primer vástago (113) del émbolo de elevación se retrae cuando la válvula (310, 311, 312) de control se coloca posteriormente en la posición de desconexión y en que el medio de retracción del émbolo comprende un dispositivo (111) de retracción en forma de un muelle de compresión o un muelle de tensión, en donde el dispositivo (111) de retracción está dispuesto en el primer diámetro (114) de activación.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/006570.
Solicitante: Integrated Tool Solutions, LLC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 1536 Kurtz Street Oceanside CA 92054 ESTADOS UNIDOS DE AMERICA.
Inventor/es: SORRIC,RONALD JON, SORRIC,RONALD WILLIAM.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25D17/30 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25D HERRAMIENTAS DE PERCUSION. › B25D 17/00 Partes constitutivas, o accesorios, de herramientas portátiles de percusión accionadas mecánicamente. › Pilares y puntales.
- B25D17/32 B25D 17/00 […] › Carros.
- B25D9/04 B25D […] › B25D 9/00 Herramientas portátiles de percusión impulsadas por la presión del fluido, p. ej. dotadas de varias cabezas de herramientas de percusión accionadas simultáneamente (a base de elementos rotativos de impacto o animados por la fuerza centrífuga B25D 15/00). › del tipo de pistón-martillo, es decir, en las que la cabeza de la herramienta o el yunque es golpeado por una pieza en movimiento.
PDF original: ES-2477340_T3.pdf
Fragmento de la descripción:
Campo tïcnico La presente invenciïn se refiere a una herramienta de percusiïn con motor que contiene un mecanismo de elevaciïn asistida para atenuar las demandas fïsicas para el funcionamiento de la pesada herramienta de percusiïn con motor y facilitar la elevaciïn y extracciïn de la herramienta de percusiïn con motor de una superficie de trabajo.
Antecedentes de la invenciïn Una herramienta de percusiïn con motor portïtil como un martillo neumïtico emplea un yunque accionado mediante un ïmbolo con un movimiento rectilïneo de vaivïn que de forma rïpida y repetidamente golpea en el extremo de una parte del cincel y lo impele a una superficie de trabajo. Su eficacia se basa en la inercia de la masa de su cuerpo y tambiïn es necesaria la fuerza de la gravedad para que la masa se vuelva a poner en contacto con la superficie de trabajo despuïs de cada golpe. Por este motivo, la herramienta de percusiïn con motor suele ser muy pesada, de forma tïpica tiene un peso de aproximadamente 27, 2 kg a 45, 4 kg (de 60 libras a 100 libras) . Durante una operaciïn rutinaria, es necesario que un operario levante y vuelva a colocar repetidamente el dispositivo pesado para la siguiente operaciïn. Cuando se trabaja con una herramienta de dicho peso, el operario tiene que soportar una gran tensiïn fïsica y, de este modo, no puede hacer funcionar el martillo neumïtico durante un perïodo de tiempo prolongado. Ademïs la parte del cincel a menudo se atasca en el material en el que se estï trabajando y quitarla requiere una gran cantidad de esfuerzo, lo que hace que la operaciïn sea todavïa mïs exigente desde el punto de vista fïsico. Por consiguiente, la productividad se ve reducida enormemente pero ademïs supone un gran riesgo para la salud de los operarios.
Se han desarrollado diversos tipos de dispositivos de elevaciïn asistida para reducir las demandas fïsicas y facilitar la elevaciïn y extracciïn del equipo. En US-2.622.562 concedida a Longenecker se describe un dispositivo de 30 elevaciïn asistida desmontable para una herramienta de percusiïn con motor, como un martillo neumïtico de demoliciïn. El dispositivo de elevaciïn asistida es un gato elevador hidrïulico que estï controlado por una vïlvula de mariposa con una palanca de accionamiento adyacente a una de las empuïaduras de la herramienta de percusiïn con motor. Cuando la vïlvula de mariposa estï engranada, el medio de activaciïn es admitido en el gato elevador y proporciona fuerza para levantar la herramienta de percusiïn con motor. Cuando la vïlvula de mariposa estï
desengranada, se libera la presiïn del medio de activaciïn, pero el ïmbolo del gato elevador permanece en contacto con la superficie de trabajo. No se proporciona ningïn mecanismo retrïctil para el ïmbolo del gato elevador en la descripciïn. Sin embargo, el ïmbolo se puede empujar hacia atrïs manualmente a una posiciïn retraïda.
En US-2.776.653 concedida a Eaton se describe una mejora en un taladro neumïtico al conectar un par de gatos elevadores neumïticos con un pie prïcticamente semicircular para acoplarse a una superficie de trabajo para levantar el taladro neumïtico. Tambiïn se proporciona un mecanismo para retraer el pie elevador cuando el taladro neumïtico vuelve a la posiciïn de trabajo.
En US-4.548.279 concedida a Zaruba se describe una herramienta de demoliciïn con un extractor para liberar una 45 herramienta de demoliciïn atascada. El extractor tiene un cilindro neumïtico con un pie elevador. No se proporciona ningïn mecanismo retrïctil para el ïmbolo en la descripciïn. El pie elevador estï en contacto continuamente con la superficie de trabajo. Se proporciona una vïlvula de control de flujo para regular la velocidad de elevaciïn.
En US-4.986.370 concedida a Johnson se describe un acoplamiento elevador neumïtico para un martillo neumïtico 50 que aplica una fuerza ascendente al martillo neumïtico. El acoplamiento elevador es un cilindro con un pie elevador. El cuerpo del cilindro estï contenido en una carcasa de soporte que tiene una placa elevadora con una perforaciïn de guïa y una cadena ajustable para fijar un martillo neumïtico a la placa elevadora. Una vez que se ha engranado, el pie elevador estï en contacto continuo con la superficie de trabajo.
En US-6.050.345 concedida a Jarvinen y col. se describe una herramienta ergonïmica que incluye un martillo neumïtico y un mecanismo de elevaciïn asistida. El mecanismo de elevaciïn asistida contiene un bastidor corredizo con un pie elevador conectado al extremo inferior y un ïmbolo conectado al extremo superior. El ïmbolo estï conectado directamente al cuerpo superior del martillo neumïtico y no se mueve. El bastidor que contiene un cilindro sin barra se mueve y proporciona una fuerza de elevaciïn para levantar el martillo neumïtico.
En GB-941 548 A se refiere a una piqueta o a un taladro neumïtico con elevaciïn asistida segïn el preïmbulo de la reivindicaciïn 1 que se acciona neumïticamente. La elevaciïn asistida comprende un soporte que se puede mover relativamente con respecto a la piqueta o taladro para que se engrane con la pieza, y que puede ejercer una fuerza en la pieza que produzca una reacciïn en la piqueta o taladro de modo que extraiga su herramienta de la pieza.
En GB-1 533 745 A se describe un dispositivo para facilitar el transporte de una herramienta portïtil con motor que tenga una herramienta de trabajo. La herramienta con motor comprende al menos una pieza ïmbolo-cilindro de doble efecto accionada hidrïulicamente dispuesta de modo que, cuando se estï utilizando, el ïmbolo se pueda mover en la direcciïn del eje de la herramienta de trabajo. Se montan medios que llevan una rueda de accionamiento en el extremo libre de una barra conectada al ïmbolo. Se proporcionan medios de asimiento y medios de entrada para suministrar lïquido a cada lado del ïmbolo para efectuar un movimiento del ïmbolo a una posiciïn retraïda en la que, cuando se estï utilizando, la herramienta de trabajo se proyecta en dicha direcciïn mïs allï de la rueda, y en una posiciïn extendida en la que la rueda se proyecta en dicha direcciïn mïs allï de la herramienta de trabajo para permitir que la herramienta con motor pueda girar.
Hace mïs de un aïo, los inventores presentes describieron un prototipo de dispositivo de elevaciïn asistida para una herramienta de percusiïn con motor, como un martillo neumïtico. El dispositivo de elevaciïn asistida contiene un cilindro de doble efecto con un pie elevador y una vïlvula de control direccional de cuatro vïas con cinco aberturas. El cilindro actuador y la vïlvula de control direccional proceden de fuentes comerciales y se suministran como dos piezas por separado. La vïlvula de control direccional estï montada en el extremo superior del cilindro utilizando un soporte de montaje y el pie estï montado en el extremo inferior del cilindro. A continuaciïn, se fija el dispositivo de elevaciïn asistida al cuerpo superior del martillo neumïtico utilizando el mismo soporte de montaje. Al utilizar un cilindro de doble efecto, el pie elevador se puede retraer redireccionando el flujo del aire comprimido de la cïmara superior a la cïmara inferior para evitar daïos al dispositivo de elevaciïn asistida cuando la herramienta de percusiïn con motor estï en funcionamiento. Una limitaciïn significativa de este prototipo es que el dispositivo de elevaciïn asistida es pesado ya que tiene un peso total de mïs de 9, 07 kg (20 libras) , lo que aïade una carga fïsica innecesaria adicional al operario.
Sin embargo, todos estos dispositivos de elevaciïn asistida anteriores estïn diseïados como una unidad independiente que se debe fijar al cuerpo de la herramienta de percusiïn con motor. Una desventaja de dicho diseïo es que el dispositivo de elevaciïn asistida aïade un peso adicional y el transporte de una unidad de estas caracterïsticas se vuelve problemïtico. Una soluciïn para reducir el peso total de la unidad de la herramienta de percusiïn con motor y el dispositivo de elevaciïn asistida es integrar el dispositivo de elevaciïn asistida en el cuerpo de una herramienta de percusiïn con motor. Por tanto, el objetivo de la presente invenciïn es proporcionar una herramienta de percusiïn con motor integrada con un mecanismo de elevaciïn asistida.
Sumario de la invenciïn De acuerdo con la presente invenciïn, se proporciona una herramienta de percusiïn con motor que contiene un mecanismo de percusiïn y un mecanismo de elevaciïn asistida con las caracterïsticas de la reivindicaciïn 1 independiente para reducir las demandas fïsicas en su funcionamiento al facilitar la elevaciïn y extracciïn de la herramienta de percusiïn con motor. Por lo general, la herramienta de percusiïn con motor es... [Seguir leyendo]
Reivindicaciones:
1. Una herramienta de percusiïn con motor integrada y elevaciïn asistida (1) , que comprende:
5
un cuerpo (10) vertical individual que comprende al menos dos diïmetros longitudinales integrales, en donde un
primer diïmetro longitudinal integral es un diïmetro (23) de percusiïn y en donde un segundo diïmetro
longitudinal integral es un primer diïmetro (114) de accionamiento;
un ïmbolo (21) de percusiïn contenido dentro del diïmetro (23) de percusiïn del cuerpo (10) vertical individual;
una herramienta (14) de trabajo fijada a la parte inferior de la herramienta de percusiïn con motor y elevaciïn
asistida (1) ;
15 un primer ïmbolo (112) de elevaciïn contenido dentro del primer diïmetro (114) de activaciïn del cuerpo (10)
vertical individual y que divide el primer diïmetro (114) de activaciïn en una cïmara (117) de elevaciïn superior
y una cïmara (118) de retracciïn inferior;
un primer vïstago (113) del ïmbolo de elevaciïn conectado al primer ïmbolo (112) de elevaciïn y que se extiende
fuera del primer diïmetro (114) de activaciïn a travïs de una abertura en la cïmara (118) de retracciïn inferior y
que se extiende fuera del cuerpo (10) vertical individual a travïs de una abertura en el cuerpo (10) vertical
individual, en donde el primer vïstago (113) del ïmbolo de elevaciïn ademïs comprende un extremo exterior;
un pie (15) de elevaciïn conectado al extremo exterior del primer vïstago (113) del ïmbolo de elevaciïn;
25
una unidad (51) de control que comprende una vïlvula (310, 311, 312) de control direccional que tiene una
posiciïn de activaciïn y una posiciïn de desactivaciïn; y caracterizada por que
dispone de un medio de retracciïn del ïmbolo que proporciona una fuerza mantenida contra el primer ïmbolo
(112) de elevaciïn en una direcciïn ascendente cuando la vïlvula (310, 311, 312) de control estï en la posiciïn
de desconexiïn y, por lo tanto, mantiene el pie (15) de elevaciïn en una posiciïn retraïda cuando la herramienta
(14) de trabajo estï engranada en una superficie de trabajo;
en donde el primer vïstago (113) del ïmbolo de elevaciïn se extiende cuando la vïlvula (310, 311, 312) de
35 control estï en la posiciïn de activaciïn y, por lo tanto eleva la herramienta (14) de trabajo de la superficie de
trabajo, y en donde el primer vïstago (113) del ïmbolo de elevaciïn se retrae cuando la vïlvula (310, 311, 312)
de control se coloca posteriormente en la posiciïn de desconexiïn y en que el medio de retracciïn del ïmbolo
comprende un dispositivo (111) de retracciïn en forma de un muelle de compresiïn o un muelle de tensiïn, en
donde el dispositivo (111) de retracciïn estï dispuesto en el primer diïmetro (114) de activaciïn.
2. La herramienta de percusiïn con motor integrada y elevaciïn asistida (1) de la reivindicaciïn 1, que ademïs
comprende un sistema de distribuciïn con un medio de activaciïn integral contenido dentro del cuerpo (10)
vertical individual, comprendiendo el sistema de distribuciïn con un medio de activaciïn integral:
45 una vïlvula (25) de mariposa que controla el flujo del medio de activaciïn presurizado en el diïmetro (23) de percusiïn;
la vïlvula (310, 311, 312) de control que tiene al menos una posiciïn normal y una posiciïn accionada,
comprendiendo la vïlvula de control una abertura (313) de entrada, una primera abertura (314, 316, 317) de salida, y
una primera abertura (315, 318, 319) de escape, en donde la vïlvula (310, 311, 312) de control controla el flujo del
medio de activaciïn presurizado en la cïmara (117) de elevaciïn superior del primer diïmetro (114) de activaciïn;
un conducto (35) de entrada al medio de activaciïn presurizado en la comunicaciïn de fluidos con una fuente
del medio de activaciïn presurizado y conectado a la vïlvula (25) de mariposa y a la abertura (313) de entrada
de la vïlvula (310, 311, 312) de control; y
55
un primer conducto (38) de transporte que conecta la primera abertura (314, 316, 317) de salida de la vïlvula
(310, 311, 312) de control a la cïmara (117) de elevaciïn superior del primer diïmetro (114) de activaciïn;
en donde cuando la vïlvula (310, 311, 312) de control estï en la posiciïn accionada la abertura (313) de
entrada de la vïlvula (310, 311, 312) de control se comunica con la primera abertura (314, 316, 317) de salida
de la vïlvula (310, 311, 312) de control y el medio de activaciïn presurizado fluye a travïs del primer conducto
(38) de transporte a la cïmara (117) de elevaciïn superior.
3. La herramienta de percusiïn con motor integrada y elevaciïn asistida (1) de la reivindicaciïn 1, en donde el
65 primer diïmetro (114) de activaciïn es cilïndrico.
4. La herramienta de percusiïn con motor integrada y elevaciïn asistida (1) de la reivindicaciïn 1, en donde el cuerpo (10) vertical individual ademïs comprende un tercer interior de diïmetro longitudinal con respecto al cuerpo (10) vertical individual, y en donde el tercer diïmetro longitudinal integral es un segundo diïmetro (114) de activaciïn.
5. La herramienta de percusiïn con motor integrada y elevaciïn asistida (1) de la reivindicaciïn 4, que ademïs comprende un segundo ïmbolo (112) de elevaciïn, en donde el segundo ïmbolo (112) de elevaciïn estï contenido dentro del segundo diïmetro (114) de activaciïn del cuerpo (10) vertical individual.
6. La herramienta de percusiïn con motor integrada y elevaciïn asistida (1) de la reivindicaciïn 5, en donde el
primer diïmetro (114) de activaciïn y el segundo diïmetro (114) de activaciïn se encuentran en lados opuestos del diïmetro (23) de percusiïn y en donde el primer diïmetro (114) de activaciïn y el segundo diïmetro (114) de activaciïn estïn equidistantes con respecto al diïmetro (23) de percusiïn 7. La herramienta de percusiïn con motor integrada y elevaciïn asistida (1) de la reivindicaciïn 1, en donde el 15 cuerpo (10) vertical individual es generalmente cilïndrico.
8. La herramienta de percusiïn con motor integrada y elevaciïn asistida (1) de la reivindicaciïn 7, en donde el ïmbolo (21) de percusiïn se acciona neumïticamente, o en donde el ïmbolo (21) de percusiïn se acciona hidrïulicamente, o en donde el ïmbolo (21) de percusiïn se acciona elïctricamente, o en donde el ïmbolo (112) de elevaciïn se acciona neumïticamente, o 25 en donde el ïmbolo (112) de elevaciïn se acciona hidrïulicamente, o en donde el ïmbolo (21) de percusiïn y el ïmbolo (112) de elevaciïn se accionan de forma independiente, o en donde el ïmbolo (21) de percusiïn y el ïmbolo (112) de elevaciïn se accionan conjuntamente, o en donde el ïmbolo (21) de percusiïn y el ïmbolo (112) de elevaciïn se accionan mediante un medio de activaciïn individual.
9. La herramienta de percusiïn con motor integrada y elevaciïn asistida (1) de la reivindicaciïn 1, que ademïs comprende al menos una empuïadura (11) y dos controles manuales (12, 13) , estando dispuestos la empuïadura (11) y los controles manuales (12, 13) a travïs de la parte superior del cuerpo (10) .
10. Uso de una herramienta de percusiïn con motor integrada y elevaciïn asistida (1) segïn cualquiera de las 40 reivindicaciones anteriores para fines de percusiïn.
Patentes similares o relacionadas:
Dispositivo y utilización para la generación de fuerzas de proceso de impulso dinámico, del 29 de Abril de 2020, de HATEBUR UMFORMMASCHINEN AG: Dispositivo para la generación de fuerzas de proceso de impulso dinámico, que comprende: - una cámara de presión , en la que está dispuesto un medio hidráulico […]
Un miembro percutor y una máquina de perforación que comprende un miembro percutor, del 6 de Diciembre de 2017, de EPIROC ROCK DRILLS AKTIEBOLAG: Un miembro percutor cilíndrico circular para una máquina de perforación, adaptado para transferir energía cinética a un miembro de recepción […]
Mecanismo de impacto hidráulico sin válvula, del 7 de Junio de 2017, de ATLAS COPCO ROCK DRILLS AB: Un mecanismo de impacto hidráulico sin válvula para uso en equipos para al menos el mecanizado de al menos un material de entre roca u hormigón que comprende una carcasa […]
 Dispositivo de martillo picador de aire comprimido, del 21 de Febrero de 2013, de Sullair Corporation: Dispositivo de martillo picador de aire comprimido que comprende una carcasa externa , un conjunto de cilindro y émbolo móvil que acciona […]
Dispositivo de martillo picador de aire comprimido, del 21 de Febrero de 2013, de Sullair Corporation: Dispositivo de martillo picador de aire comprimido que comprende una carcasa externa , un conjunto de cilindro y émbolo móvil que acciona […]
 PICO HIDRÁULICO, del 25 de Abril de 2011, de KONEK, S.R.O: Pico hidráulico compuesto por un alojamiento de soporte giratorio monolítico , un vástago de pistón cilíndrico , un percutor giratorio y una herramienta de trabajo […]
PICO HIDRÁULICO, del 25 de Abril de 2011, de KONEK, S.R.O: Pico hidráulico compuesto por un alojamiento de soporte giratorio monolítico , un vástago de pistón cilíndrico , un percutor giratorio y una herramienta de trabajo […]
MECANISMO DE PERCUSION DE MUELLE NEUMATICO CON PISTON DE ACCIONAMIENTO DE CORTA LONGITUD DE CONSTRUCCION., del 16 de Noviembre de 2004, de WACKER CONSTRUCTION EQUIPMENT AG: Mecanismo de percusión de muelle neumático para un martillo de percusión y/o de perforación, que comprende - un pistón de accionamiento que puede moverse […]
UN METODO Y UN APARATO DE TALADRADO PARA AJUSTAR LA FORMA DE UN IMPULSO DE CARRERA TRANSMITIDO A LA BROCA DE TALADRO., del 1 de Marzo de 2003, de DOOFOR OY: Un método en un aparato de taladrado, en el que la forma de impulso que transmite energía de impacto producida por un pistón sobre la broca de taladro […]
 APARATO HIDRAULICO DE PERCUSION, del 16 de Abril de 2008, de MONTABERT S.A.: Aparato hidráulico de percusión que comprende un cuerpo que contiene un cilindro en el interior del cual está montado deslizante un pistón de golpeo de una herramienta, […]
APARATO HIDRAULICO DE PERCUSION, del 16 de Abril de 2008, de MONTABERT S.A.: Aparato hidráulico de percusión que comprende un cuerpo que contiene un cilindro en el interior del cual está montado deslizante un pistón de golpeo de una herramienta, […]