MAQUINA TRANSPLANTADORA.
Máquina trasplantadora que comprende:
- al menos un dedo (3) para trasplantar automáticamente plantas,
dicho dedo (3) siendo móvil al menos entre una primera posición, en la cual intercepta y aferra una respectiva planta, y una segunda posición, en la cual el dedo suelta la planta; - medios de movimiento (4) conectados operativamente al dedo (3) para mover este último entre la primera y la segunda posición después de haber recibido al menos una señal de control; - medios de control (5) operativamente en comunicación con los medios de movimiento (4) de modo de impartir un mando a estos últimos a través de dicha al menos una señal de control; la máquina trasplantadora estando caracterizada por el hecho que además comprende: i) medios de transmisión inalámbrica (17) intercalados operativamente entre los medios de control (5) y los medios de movimiento (4) de modo de transmitir a estos últimos dicha al menos una señal; ii) medios de alimentación que, a su vez, comprenden: - un primer elemento conductor (12) que se extiende en una dirección preferencial y está conectado a una fuente de alimentación eléctrica; y - un segundo elemento conductor (13) conectado operativamente al primer elemento conductor (12) y a un motor eléctrico (6) que forma parte de los medios de movimiento (4), el segundo elemento conductor (13) siendo móvil a lo largo del primer elemento conductor (12) de modo de proporcionar una alimentación continua de energía eléctrica al motor (6) durante los movimientos del dedo (3) a lo largo de al menos una dirección substancialmente paralela al mismo primer elemento conductor (12)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05425646.
Solicitante: URBINATI S.R.L.
Nacionalidad solicitante: Italia.
Dirección: VIA DELLA LIBERAZIONE 18,47030 SAN MAURO PASCOLI (FC).
Inventor/es: URBINATI,NINO.
Fecha de Publicación: .
Fecha Solicitud PCT: 15 de Septiembre de 2005.
Fecha Concesión Europea: 28 de Octubre de 2009.
Clasificación Internacional de Patentes:
- A01C11/02B
Clasificación PCT:
- A01C11/02 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01C PLANTACION; SIEMBRA; FERTILIZACION (en combinación con el trabajo de la tierra propiamente dicho A01B 49/04; partes constitutivas o accesorios de máquinas o instrumentos agrícolas, en general A01B 51/00 - A01B 75/00). › A01C 11/00 Máquinas trasplantadoras (transportadores del personal A01B 75/00; dispositivos para trasplantar árboles A01G 23/02). › para plantas.
Clasificación antigua:
- A01C11/02 A01C 11/00 […] › para plantas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Máquina transplantadora.
La presente invención se refiere a una máquina trasplantadora de plantas.
Esta invención tiene aplicación en el sector de viveros industriales y es adecuada en particular para trasplantar plantas automáticamente.
Como se sabe, las plantas se pueden trasplantar automáticamente mediante máquinas del tipo que comprende una pluralidad de pinzas o dedos
en condiciones de penetrar respectivos terrones de tierra donde se están desarrollando plantas de semillero. En particular, cada dedo se mueve según un sistema de ejes cartesianos entre una primera posición, en la cual aferra una respectiva planta de semillero desde una estación de extracción, y una segunda posición, en la cual pone la planta de semillero en una maceta suficientemente ancha para contenerla. Normalmente la planta de semillero en la estación de extracción está dispuesta según filas paralelas sobre una adecuada superficie de apoyo.
Normalmente, los dedos son movidos, independientemente entre sí, a lo largo de un único eje cartesiano substancialmente paralelo a la fila de plantas de semillero a transplantar y también pueden ser movidos como un bloque en una dirección paralela a los otros ejes cartesianos.
A tal efecto, cada dedo está vinculado con libertad de deslizamiento a una guía común de forma alargada y está provisto de un respectivo motor eléctrico. El árbol de salida del motor tiene un elemento de transmisión que se engrana con una respectiva cremallera que se extiende en una dirección paralela a dicha guía común. Cuando se acciona uno de los motores eléctricos, la interacción entre el respectivo elemento de transmisión y la cremallera provoca que el correspondiente conjunto motor/dedo se mueva a lo largo de dicha guía.
Normalmente, cada motor es accionado en base a la posición relativa entre el respectivo dedo y la planta de semillero a extraer y es mandado a través de una o varias señales e/o instrucciones enviadas por adecuados medios de mando instalados en la máquina trasplantadora. Tanto las señales de control para mover los dedos como la alimentación del motor son llevadas hasta los motores por engorrosos cables de transmisión que deben ser suficientemente largos para cubrir las distancias máximas existentes entre las partes móviles y las partes fijas de la máquina. Por consiguiente, se necesitan grandes cantidades de cables y estos últimos tienden a entorpecer los movimientos de las partes de la máquina. Además, los cables exigen una atención regular y servicios de mantenimiento para contrarrestar desgastes, averías y daños.
En algunos casos, las señales para la comunicación de información entre los medios de control y el motor así como la alimentación eléctrica necesaria para activar los motores son transmitidas a través de un único cable. En otros casos, las señales para comunicación de datos y la alimentación viajan por separado a través de líneas dedicadas.
La parte solicitante ha hallado que si bien las actuales máquinas trasplantadoras son satisfactorias en términos de eficiencia de transplante, las mismas presentan varias desventajas intrínsecas debidas principalmente a la complejidad estructural de las mismas máquinas y al obstáculo creado por los cables móviles.
A lo anterior cabe agregar que las actuales máquinas necesitan frecuentes servicios de mantenimiento porque los cables se dañan con mucha facilidad. Inevitablemente los costos de mantenimiento se reflejan sobre los costos totales del transplante automático.
El documento WO 93/19.581 describe un aparato para transferir plantas de semillero controlado mediante un ordenador que incluye un par de transportadores para soportar un piso de plantas y un piso de macetas. Mecanismos de avance por pasos asociados desplazan los pisos a lo largo del transportador para alinear ahuecamientos de los pisos con una estación de transferencia dispuesta entre los pisos. Un mecanismo de transferencia de plantas de semillero dispuesto arriba de los transportadores se mueve transversalmente entre los pisos e incluye dedos aferradores extensibles para aferrar, transferir y trasplantar una planta de semillero. Un ordenador controla el movimiento de los mecanismos de avance por pasos y del mecanismo de transferencia de plantas de semillero de modo de optimizar la operación de transferencia de plantas de semillero en base a la condición de los ahuecamientos de los pisos detectada por una cámara.
El objetivo principal de la presente invención es el de eliminar los problemas intrínsecos de la técnica conocida proporcionando una máquina trasplantadora en la cual la comunicación de información entre los medios de control y los medios de movimiento así como la transmisión de electricidad a los medios de movimiento se lleva a cabo sin cables móviles o dispositivos de conexión hardware similares.
Esos y otros objetivos, que se pondrán aún más de manifiesto a lo largo de la descripción que sigue, se logran mediante una máquina trasplantadora que posee las características descritas en la reivindicación 1.
Otras características técnicas y ventajas se pondrán aún más de manifiesto a partir de la descripción detallada, formulada abajo, de una realización preferida y no restrictiva de una máquina trasplantadora de conformidad con la presente invención.
La descripción de abajo se formula con referencia a los dibujos anexos que se proporcionan únicamente a título ilustrativo y, por ende, sin restringir el alcance de la invención y en los cuales:
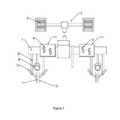
- la figura 1 es una vista esquemática en elevación de una máquina trasplantadora según la presente invención;
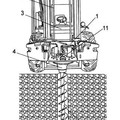
- la figura 2 es una vista lateral esquemática de un detalle de la máquina trasplantadora de la figura 1 hecha de conformidad con una primera ejecución de la presente invención;
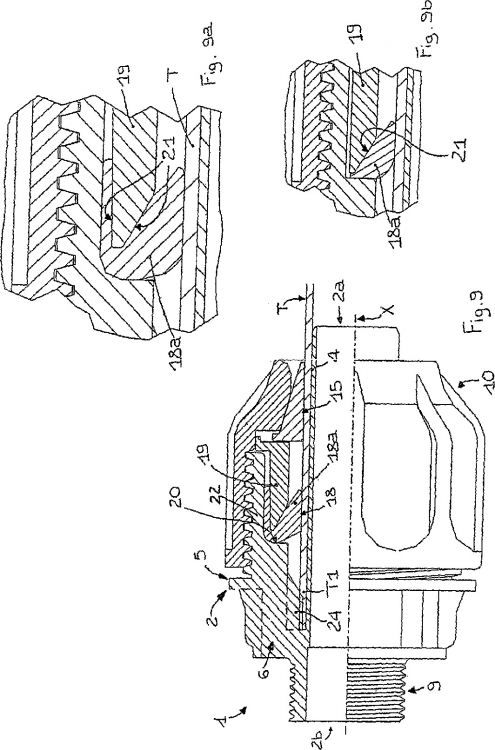
- la figura 3 es una vista lateral esquemática de un detalle de la máquina trasplantadora de la figura 1 hecha de conformidad con una segunda realización de la presente invención;
- la figura 4 es otra vista lateral esquemática de una parte de la máquina trasplantadora de conformidad con la presente invención.
Con referencia a la figura 1, el número 1 denota en su conjunto una máquina trasplantadora realizada de conformidad con la presente invención.
Como se puede ver en la figura 1, la máquina trasplantadora (1) comprende una estructura portante (2) fijada en correspondencia del fondo a una base (no exhibida) que soporta una serie de componentes fijos y móviles mediante los cuales vienen trasplantadas una o varias plantas (no exhibidas) dentro de macetas o contenedores de ese tipo.
Observando con mayor detenimiento, la estructura portante (2) comprende al menos un par de montantes (2a) conectados entre sí en la parte superior por una porción de cobertura (2b). Los montantes (2a) y la porción de cobertura (2b) definen, al menos en parte, un espacio de trabajo (2c) dentro del cual están alojados dichos componentes fijos y móviles de la máquina trasplantadora (1). Los montantes (2a) y la porción de cobertura (2b), además, forman una estructura protectora (no descrita ni exhibida con mayor nivel de detalles puesto que es de tipo muy conocido) que aísla el espacio de trabajo (2c) con respecto al ambiente circunstante.
Dentro del espacio de trabajo (2c), la máquina trasplantadora (1) comprende al menos un dedo (3) para trasplantar automáticamente plantas, y móvil al menos entre una primera posición, en la cual intercepta y aferra una respectiva planta ubicada en una estación de extracción (no exhibida), y una segunda posición, en la cual suelta la planta y la coloca dentro de una maceta o un contenedor similar.
En la realización exhibida en la figura 1, la máquina trasplantadora (1) preferentemente comprende una pluralidad de dedos (3) alineados transversalmente en una dirección predeterminada de modo que pueda ser trasplantada, simultánea y automáticamente, una gran cantidad de plantas. Con antelación las plantas vienen transferidas a la estación de extracción utilizando sistemas de carga convencionales, que se componen de cintas transportadoras, por ejemplo, que las alinean en filas según direcciones substancialmente paralelas y rectilíneas.
Dentro del espacio de trabajo (2c), cada dedo (3) preferentemente es móvil según un sistema de ejes cartesianos, lo que equivale a decir, a lo largo de un primer y un segundo eje substancialmente horizontales (X
y Z
) y a lo largo de un tercer eje substancialmente...
Reivindicaciones:
1. Máquina trasplantadora que comprende:
2. Máquina trasplantadora según la reivindicación 1, caracterizada por el hecho que los medios de transmisión inalámbrica (17) comprenden un primer bloque transceptor (17a) asociado con los medios de control (5) y un segundo bloque transceptor (17b) asociado con los medios de movimiento (4); el primer y el segundo bloque transceptor (17a y 17b) permitiéndole a los medios de control (5) y los medios de movimiento (4) comunicar entre sí.
3. Máquina trasplantadora según la reivindicación 2, caracterizada por el hecho que el primer y el segundo bloque transceptor (17a y 17b) comunican entre sí por medio de ondas electromagnéticas.
4. Máquina trasplantadora según la reivindicación 3, caracterizada por el hecho que el primer y el segundo bloque transceptor (17a y 17b) comunican entre sí por medio de ondas electromagnéticas en el espectro infrarrojo.
5. Máquina trasplantadora según la reivindicación 3, caracterizada por el hecho que el primer y el segundo bloque transceptor (17a y 17b) comunican entre sí por medio de ondas electromagnéticas en el espectro de radiofrecuencia.
6. Máquina trasplantadora según la reivindicación 2, caracterizada por el hecho que el primer y el segundo bloque transceptor (17a y 17b) comunican entre sí a través de al menos un protocolo de comunicación predeterminado.
7. Máquina trasplantadora según una cualquiera de las precedentes reivindicaciones, caracterizada por el hecho que el segundo elemento conductor (13) está conectado operativamente al primer elemento conductor (12) sin la intercalación de cables de alimentación.
8. Máquina trasplantadora según una cualquiera de las precedentes reivindicaciones, caracterizada por el hecho que el primer elemento conductor (12) comprende un par de pistas conductoras (12a y 12b) y por el hecho que el segundo elemento conductor (13) comprende al menos dos escobillas (13a, 13b) en contacto con las respectivas pistas conductoras (12a, 12b) del primer elemento conductor (12).
9. Máquina trasplantadora según una o varias de las precedentes reivindicaciones, caracterizada por el hecho que los medios de alimentación (11) transfieren corriente eléctrica por inducción magnética desde la fuente de alimentación a un respectivo motor eléctrico (6) que forma parte de los medios de movimiento (4).
10. Máquina trasplantadora según la reivindicación 9, caracterizada por el hecho que los medios de alimentación (11) transfieren corriente eléctrica desde la fuente de alimentación al respectivo motor eléctrico (6) sin contactos por deslizamiento.
11. Máquina trasplantadora según la reivindicación 9 o 10, caracterizada por el hecho que los medios de alimentación (11) comprenden un elemento magnético (19) intercalado operativamente entre el primer y el segundo elemento conductor (12 y 13) y preferentemente asociado con el segundo elemento conductor (13) de modo de inducir en el mismo segundo elemento conductor (13) una corriente eléctrica para el accionamiento del respectivo motor (6) durante los movimientos del dedo (3) a lo largo de por lo menos una dirección substancialmente paralela a la dirección en la cual se extiende el mismo primer elemento conductor (12).
12. Máquina trasplantadora según una cualquiera de las precedentes reivindicaciones, caracterizada por el hecho que además comprende medios de detección (18) asociados operativamente con el dedo (3) para detectar la posición de este último con respecto a por lo menos una posición fija de referencia; los medios de detección (18) comunicando la posición del dedo (3) a medios de control que están asociados operativamente con los medios de movimiento (4), moviendo así al dedo de conformidad con la por lo menos una señal de control y la posición del dedo (3) detectada por los medios de detección (18).
13. Máquina trasplantadora según la reivindicación 12, caracterizada por el hecho que los medios de detección (18) comprenden al menos un codificador.
14. Máquina trasplantadora según la reivindicación 1, 2, 3, 4, 5, 6 u 11, caracterizada por el hecho que los medios de movimiento (4) además comprenden al menos una unidad de movimiento (14) conectada operativamente al dedo (3) de modo de mover este último a lo largo de una primera y/o una segunda dirección substancialmente perpendicular a la dirección en la cual se extiende el primer elemento conductor (12) y substancialmente perpendiculares entre sí.
15. Máquina trasplantadora según la reivindicación 14, caracterizada por el hecho que la unidad de movimiento (14) comprende:
A);
B);
Patentes similares o relacionadas:
Un aparato para trasplantar plantas, del 21 de Junio de 2017, de Plant Tape USA, Inc: Un aparato para trasplantar plantas que comprende un módulo de trasplante configurado para trasplantar una pluralidad de plantas en una fila, el módulo de trasplante […]
MAQUINA PARA TRANSPLANTE DE PLANTULAS CON CEPELLÓN, del 15 de Diciembre de 2016, de UNIVERSIDAD NACIONAL DE COLOMBIA: La invención corresponde a una máquina para el trasplante de plántulas, que comprende un chasis móvil y una unidad de trasplante. El chasis móvil tiene […]
 Plantadora de matas de plataneras y procedimiento de plantación, del 16 de Febrero de 2015, de Megacentrum J.J.A., S.L: Plantadora de matas de platanera y procedimiento de plantación.
Constituida a partir de un bastidor unido a un vehículo remolcador que posee un eje central paralelo a la parte […]
Plantadora de matas de plataneras y procedimiento de plantación, del 16 de Febrero de 2015, de Megacentrum J.J.A., S.L: Plantadora de matas de platanera y procedimiento de plantación.
Constituida a partir de un bastidor unido a un vehículo remolcador que posee un eje central paralelo a la parte […]
 MAQUINA PARA EL PLANTADO DE ARBOLES, del 7 de Junio de 2012, de MARSAL JOVE,DAVID: Máquina para el plantado de árboles.
Especialmente concebida para permitir llevar a cabo el plantado de árboles a una cierta profundidad de forma rápida y […]
MAQUINA PARA EL PLANTADO DE ARBOLES, del 7 de Junio de 2012, de MARSAL JOVE,DAVID: Máquina para el plantado de árboles.
Especialmente concebida para permitir llevar a cabo el plantado de árboles a una cierta profundidad de forma rápida y […]
MAQUINA TRASPLANTADORA., del 16 de Abril de 2006, de WILLIAMES HI-TECH INTERNATIONAL PTY. LIMITED: La presente invención se refiere a un aparato para transplantar plantones de semillero de una bandeja que contiene una pluralidad de compartimientos […]
DISPOSITIVO PARA COLOCAR MATERIAL DE PLANTAS SOBRE O EN UN MACIZO O BANCAL., del 16 de Mayo de 2005, de SILCA APPARATENBOUW B.V.: Dispositivo para colocar material de plantar, tal como plantas o esquejes, sobre o en un macizo o bancal, por ejemplo en terreno de granja […]
BANDEJAS DE CULTIVO MEJORADAS Y MECANISMOS DE MANIPULACION DE LAS MISMAS., del 1 de Noviembre de 2004, de WILLIAMES HI-TECH INTERNATIONAL PTY. LIMITED: Una bandeja de cultivo que tiene una pluralidad de células en una serie predeterminada, teniendo cada célula una cara superior abierta y una abertura […]
INSTALACION PARA TRANSPLANTAR PLANTAS CON CEPELLONES., del 16 de Agosto de 2004, de GERPLANT AUTOMATION: PARA TRASPLANTAR PLANTONES CON CEPELLON , SE COGE EN UN PUESTO DE PRENSION, MEDIANTE VARIAS CABEZAS DE PRESION , SIMULTANEAMENTE VARIOS PLANTONES DISPUESTOS SEGUN […]