MÁQUINA PARA TAPAR CAJAS.
1. Máquina para tapar cajas caracterizada porque comprende:
- Una zona de suministro (1),
que comprende:
- un carril transportador (4),
- al menos un mecanismo con elevadores (6),
- unos frenos (24), y
- una estación de lectura dimensional (5),
- Una zona de trabajo (2), que comprende:
- al menos un dispositivo de encolado configurado para aplicar cola sobre una caja (10), una tapa (9) o ambas,
- al menos un dispositivo de tapado (14) que comprende un mecanismo de accionamiento vertical (15) unido a una terminación en cruz (16) que incorpora un dispositivo de plegado (17) con un actuador (21) en cada uno de los brazos y dos carriles (23) en sendos brazos opuestos,
- un posicionador de tapas (13) configurado para mover una tapa (9) y posicionada en los carriles (23) del dispositivo de tapado (14),
- Una zona de salida (3) que comprende un carril transportador (4),
donde:
- los mecanismos con elevadores (6) y los frenos (24) actúan sobre las cajas (10) durante un tiempo determinado, de forma que las cajas (10) son inmovilizadas, creando una pausa en el suministro de cajas (10) a la zona de trabajo (2),
- los dispositivos de plegado (17) tienen capacidad de posicionamiento a lo largo de los respectivos brazos de la terminación en cruz (16), de forma que son válidos para diferentes tamaños de tapas (9),
- los dispositivos de plegado (17) están configurados para, una vez desplegado el mecanismo de accionamiento vertical (15), plegar unas solapas de una tapa (9) sobre una caja (10) y mantener la presión durante un tiempo determinado,
- el movimiento de rotación de los dispositivos de plegado (17) para el plegado de las solapas se activa al ejercer presión sobre los actuadores (21).
2. Máquina para tapar cajas, según la reivindicación 1, caracterizada porque comprende:
- un brazo mecánico (18) que incorpora al menos una ventosa de vacío (11),
- un alimentador de tapas (18),
donde el brazo mecánico (18) está configurado para moverse y extraer tapas (9) del alimentador (18) mediante las ventosas de vacío (11).
3. Máquina para tapar cajas, según cualquiera de las reivindicaciones 1 ó 2, caracterizada porque el dispositivo de tapado (14) comprende una placa de empuje (20) fijada mediante al menos un eje retráctil (22) a la terminación en cruz (16) que, al contactar con una tapa (9) por el despliegue del mecanismo de accionamiento vertical (15), se retrae y ejerce presión sobre los actuadores (21), activando el movimiento de rotación de los dispositivos de plegado (17).
4. Máquina para tapar cajas, según cualquiera de las reivindicaciones 1 a 3, caracterizada porque comprende dos dispositivos de tapado (14) con capacidad de movimiento a lo largo de sendos carriles paralelos al carril transportador (4) por la zona de trabajo (2) y configurados para actuar simultáneamente sobre sendas tapas (9).
5. Máquina para tapar cajas, según la reivindicación 4, caracterizada porque los dispositivos de tapado (14) están ubicados en posiciones enfrentadas con respecto al eje longitudinal del carril transportador (4), y están configurados para desplazarse con el mecanismo de accionamiento vertical (15) en posición desplegada, ejerciendo presión sobre la tapa (9) de una caja (10) en una dirección, y en posición plegada en la dirección de retorno, de forma que no se interfieren.
6. Máquina para tapar cajas, según cualquiera de las reivindicaciones anteriores, caracterizada porque comprende un microprocesador configurado para recibir los datos obtenidos en la estación de lectura dimensional (5) y hacerlos accesibles, mediante conexión eléctrica o inalámbrica, a los dispositivos de encolado y al dispositivo de tapado (14), de forma que obtengan datos sobre la posición y las dimensiones de la caja (10).
7. Máquina para tapar cajas, según la reivindicación 6, caracterizada porque, en función de los datos recibidos por el microprocesador en la estación de lectura dimensional (5), se posicionan los dispositivos de encolado.
8. Máquina para tapar cajas, según la reivindicación 6, caracterizada porque, en función de los datos recibidos por el microprocesador en la estación de lectura dimensional (5), los dispositivos de tapado (14) despliegan los mecanismos de accionamiento vertical (15) a la posición adecuada.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201530711.
Solicitante: BOIX MAQUINARIA S.L.
Nacionalidad solicitante: España.
Inventor/es: BOIX JAEN,JOSE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B31B3/00
- B65B7/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 7/00 Cierre de los receptáculos o recipientes después del llenado. › Cierre de receptáculos o recipientes semirrígidos o rígidos, no deformados por el contenido o que no toman su forma, p. ej. cajas o cartones.
Fragmento de la descripción:
MÁQUINA PARA TAPAR CAJAS
OBJETO DE LA INVENCIÓN
La presente invención se refiere a una máquina para tapar cajas de cartón convencionales 5 de forma rápida y efectiva mediante la ubicación de una tapa plana dotada de solapas perimetrales que son plegadas alrededor de la abertura de la caja y presionadas para que queden fijas por la actuación de una cola aplicada.
Encuentra especial aplicación en el ámbito de la industria relacionada con envíos de 10 paquetería y logística en general.
PROBLEMA TÉCNICO A RESOLVER .
ANTECEDENTES DE LA INVENCIÓN
Las máquinas en relación con la fabricación de cajas de cartón son ya conocidas en el actual estado de la técnica. Las cajas que se fabrican proceden de láminas de cartón 15 troquelado con las medidas determinadas para la formación de la caja en particular. Estas cajas pueden ser abiertas o con solapas para llevar a cabo el cierre posteriormente.
El proceso de cierre de las máquinas también es conocido en el estado de la técnica, siendo utilizado en la industria de modo general y, principalmente, por empresas dedicadas al 20 suministro de paquetería. Una vez las cajas han sido llenadas, debe procederse al proceso de cierre. En estos casos, se distingue entre las cajas con solapas y las cajas abiertas sin solapas.
En el caso de cajas con solapas, las máquinas están enfocadas en una fase inicial de 25 doblado de las solapas.
Las cajas sin solapas comprenden igualmente una fase inicial en la que deben cerrarse mediante una tapa independiente. Las tapas utilizadas pueden ser de dos tipos: unas que incorporan un reborde perimetral, de forma que encajan en el borde perimetral abierto de la 30 caja destinada a cerrarse y otras que son simplemente una lámina plana que se coloca sobre la caja
En ambos casos, ya sea para cajas con solapa o sin ellas, el cierre debe comprender una fase adicional consistente en la fijación de la tapa a la caja. Para ello se emplea la aplicación de cinta de embalar o de flejes, de forma que el cierre es definitivo, debiendo romperse para abrir la caja.
Sin embargo, estos métodos de cierre de cajas tienen el inconveniente de que presentan elementos adicionales, como son la cinta de embalar o el fleje, que pueden engancharse durante la manipulación y abrirse, desencadenando el vaciado de la caja y el consecuente problema logístico posterior.
La presente invención viene a solucionar este problema presentando una máquina para tapar cajas de cartón que incorpora una tapa con solapas perimetrales que se pliegan y se unen posteriormente a la caja mediante cola. De esta forma, se asegura la inviolabilidad del contenido, ya que cualquier manipulación debe romper la tapa sin que exista posibilidad de reparación. 15
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención se refiere a una máquina para tapar cajas mediante la implementación de una tapa plana con solapas que se pliegan para unirlas a la caja mediante cola. 20
La máquina comprende una zona de suministro, una zona de trabajo y una zona de salida.
La zona de suministro incorpora un carril transportador, al menos un mecanismo con elevadores que actúa sobre una caja durante un tiempo determinado, de forma que la caja 25 es elevada e inmovilizada, creando una pausa en el suministro de cajas. Además de los elevadores, la zona de suministro incorpora unos frenos que, con la caja en posición elevada, la aprisionan de forma que se asegure su inmovilización, ya sea dándole estabilidad o evitando que sea empujada por una caja que viene por detrás. También incorpora una estación de lectura dimensional para la captación de las dimensiones de la 30 caja.
La zona de trabajo incorpora al menos un dispositivo de encolado configurado para aplicar cola sobre una caja, una tapa o ambas. También incorpora al menos un dispositivo de tapado. El dispositivo de tapado comprende un mecanismo de accionamiento vertical unido a una terminación en cruz que incorpora dos carriles ubicados en paralelo para alojar la tapa. La terminación en cruz también incorpora, en cada uno de los brazos, un dispositivo de plegado que se utiliza para, una vez desplegado el mecanismo de accionamiento vertical, plegar las solapas de la tapa y mantener la presión durante un tiempo predeterminado. Cada 5 uno de los dispositivos de plegado incorpora un actuador y puede posicionarse a lo largo de los respectivos brazos de la terminación en cruz, de forma que son válidos para diferentes tamaños de tapas. El movimiento de rotación de cada dispositivo de plegado se activa al ejercer presión sobre los actuadores. Por último, también incorpora un posicionador de tapas configurado para mover una tapa y posicionarla en los carriles del dispositivo de 10 tapado.
La zona de salida incorpora también un carril transportador para la extracción de las cajas de la máquina.
La máquina puede incorporar un brazo mecánico con al menos una ventosa de vacío y un alimentador de tapas. El brazo mecánico se puede mover para extraer tapas del alimentador mediante las ventosas de vacío.
El dispositivo de tapado de la máquina puede comprender también una placa de empuje 20 fijada a la terminación en cruz mediante al menos un eje retráctil. Al desplegarse el mecanismo de accionamiento vertical, la tapa se posiciona sobre la caja. Al seguir desplegándose, la tapa se sale de los carriles hasta que la placa de empuje toca la tapa y ejerce presión sobre una amplia superficie de la tapa, ayudando a que la posición de la tapa sobre la caja se ajuste. Al contactar la placa de empuje con una tapa y presionarla, se 25 contraen los ejes retráctiles, de forma que la placa de empuje se retrae y ejerce presión sobre los actuadores, que provocan el movimiento de rotación de los dispositivos de plegado.
La máquina puede comprender dos dispositivos de tapado configurados para actuar 30 simultáneamente sobre dos tapas. En esta ocasión, cuando uno de los dispositivos de tapado se despliega para ejercer presión sobre una tapa, en lugar de permanecer estático para que un empujador arrastre la caja posteriormente, es el propio dispositivo de tapado el que arrastra la caja, de forma que se aprovecha el tiempo al máximo. Con el objetivo de buscar una máquina lo más compacta posible, los dispositivos de tapado están ubicados en posiciones enfrentadas con respecto al eje longitudinal del carril transportador y están configurados para desplazarse a lo largo de sendos carriles paralelos al carril transportador de forma que no se interfieran entre ellos. De esta forma, mientras uno de los dispositivos de tapado se desplaza en una dirección con el mecanismo de accionamiento vertical en 5 posición desplegada, ejerciendo presión sobre la tapa de una caja, el otro dispositivo de tapado se desplaza en posición plegada en la dirección de retorno.
La activación de los diferentes componentes de la máquina puede llevarse a cabo mediantes medios electromecánicos. De esta forma, se controla la cadencia de las cajas en 10 la zona de suministro, la activación y parada de los empujadores, la activación del brazo mecánico y las ventosas para la extracción de una tapa, la activación del posicionador de tapas para colocar la tapa en los carriles del dispositivo de tapado y la activación del dispositivo de tapado.
La máquina puede incorporar también medios electrónicos para el control del proceso, como un microprocesador configurado, además de para activar los diferentes componentes de la máquina, para recibir los datos obtenidos en la estación de lectura dimensional y hacerlos accesibles a los dispositivos de encolado y al dispositivo de tapado, de forma que obtengan datos sobre la altura de la caja, la posición de la tapa y las dimensiones de la tapa. En este 20 caso, los diferentes componentes están conectados eléctricamente con el microprocesador, físicamente o mediante medios inalámbricos. De esta forma, en función de los datos recibidos por el microprocesador en la estación de lectura dimensional, los dispositivos de encolado aplican los cordones de cola en la posición predeterminada, y los dispositivos de tapado tienen información sobre la altura a la que posicionarse para que las placas de 25 empuje ejerzan presión sobre las tapas.
BREVE DESCRIPCIÓN DE LAS FIGURAS
Para completar la invención que se está describiendo y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferente de 30 realización de la misma, se acompaña un conjunto de dibujos en donde, con carácter ilustrativo y no limitativo, se han representado las siguientes figuras:
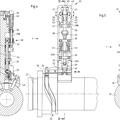
- La figura 1 representa una vista lateral de la máquina de la invención en una primera...
Reivindicaciones:
1. Máquina para tapar cajas caracterizada porque comprende:
- Una zona de suministro (1), que comprende:
- un carril transportador (4),
- al menos un mecanismo con elevadores (6),
- unos frenos (24), y
- una estación de lectura dimensional (5),
- Una zona de trabajo (2), que comprende:
- al menos un dispositivo de encolado configurado para aplicar cola sobre una caja (10), una tapa (9) o ambas,
- al menos un dispositivo de tapado (14) que comprende un mecanismo de accionamiento vertical (15) unido a una terminación en cruz (16) que incorpora un dispositivo de plegado (17) con un actuador (21) en cada uno de los brazos y dos carriles (23) en sendos brazos opuestos,
- un posicionador de tapas (13) configurado para mover una tapa (9) y posicionada en los carriles (23) del dispositivo de tapado (14),
- Una zona de salida (3) que comprende un carril transportador (4),
donde:
- los mecanismos con elevadores (6) y los frenos (24) actúan sobre las cajas (10) durante un tiempo determinado, de forma que las cajas (10) son inmovilizadas, creando una pausa en el suministro de cajas (10) a la zona de trabajo (2),
- los dispositivos de plegado (17) tienen capacidad de posicionamiento a lo largo de los respectivos brazos de la terminación en cruz (16), de forma que son válidos para diferentes tamaños de tapas (9),
- los dispositivos de plegado (17) están configurados para, una vez desplegado el mecanismo de accionamiento vertical (15), plegar unas solapas de una tapa (9) sobre una caja (10) y mantener la presión durante un tiempo determinado,
- el movimiento de rotación de los dispositivos de plegado (17) para el plegado de las solapas se activa al ejercer presión sobre los actuadores (21).
2. Máquina para tapar cajas, según la reivindicación 1, caracterizada porque comprende:
- un brazo mecánico (18) que incorpora al menos una ventosa de vacío (11),
- un alimentador de tapas (18),
donde el brazo mecánico (18) está configurado para moverse y extraer tapas (9) del alimentador (18) mediante las ventosas de vacío (11).
3. Máquina para tapar cajas, según cualquiera de las reivindicaciones 1 ó 2, caracterizada porque el dispositivo de tapado (14) comprende una placa de empuje (20) fijada mediante al menos un eje retráctil (22) a la terminación en cruz (16) que, al contactar con una tapa (9) por el despliegue del mecanismo de accionamiento vertical (15), se retrae y ejerce presión sobre los actuadores (21), activando el movimiento de rotación de los dispositivos de plegado (17).
4. Máquina para tapar cajas, según cualquiera de las reivindicaciones 1 a 3, caracterizada porque comprende dos dispositivos de tapado (14) con capacidad de movimiento a lo largo de sendos carriles paralelos al carril transportador (4) por la zona de trabajo (2) y configurados para actuar simultáneamente sobre sendas tapas (9).
5. Máquina para tapar cajas, según la reivindicación 4, caracterizada porque los dispositivos de tapado (14) están ubicados en posiciones enfrentadas con respecto al eje longitudinal del carril transportador (4), y están configurados para desplazarse con el mecanismo de accionamiento vertical (15) en posición desplegada, ejerciendo presión sobre la tapa (9) de una caja (10) en una dirección, y en posición plegada en la dirección de retorno, de forma que no se interfieren.
6. Máquina para tapar cajas, según cualquiera de las reivindicaciones anteriores, caracterizada porque comprende un microprocesador configurado para recibir los datos obtenidos en la estación de lectura dimensional (5) y hacerlos accesibles, mediante conexión eléctrica o inalámbrica, a los dispositivos de encolado y al dispositivo de tapado (14), de forma que obtengan datos sobre la posición y las dimensiones de la caja (10).
7. Máquina para tapar cajas, según la reivindicación 6, caracterizada porque, en función de los datos recibidos por el microprocesador en la estación de lectura dimensional (5), se posicionan los dispositivos de encolado.
8. Máquina para tapar cajas, según la reivindicación 6, caracterizada porque, en función de los datos recibidos por el microprocesador en la estación de lectura dimensional (5), los dispositivos de tapado (14) despliegan los mecanismos de accionamiento vertical (15) a la posición adecuada.
Patentes similares o relacionadas:
Envasado de chips comestibles de aperitivo, del 15 de Julio de 2020, de Frito-Lay Trading Company GmbH (100.0%): Un procedimiento para envasar chips comestibles de aperitivo , comprendiendo dicho procedimiento las siguientes etapas: a) proporcionar […]
Dispositivo y procedimiento para formar las superficies de gablete de envases con gablete oblicuo, del 3 de Junio de 2020, de SIG TECHNOLOGY AG: Dispositivo para formar las superficies de gablete de envases con gablete oblicuo, que comprende: - una instalación de transporte con celdas fijadas […]
 Dispositivo para cerrar en un solo lado mangas de envase para la fabricación de envases compuestos, del 29 de Abril de 2020, de SIG TECHNOLOGY AG: Dispositivo para cerrar en un solo lado mangas de envase (S) para la fabricación de envases compuestos, en particular envases compuestos de cartón/plástico, mediante […]
Dispositivo para cerrar en un solo lado mangas de envase para la fabricación de envases compuestos, del 29 de Abril de 2020, de SIG TECHNOLOGY AG: Dispositivo para cerrar en un solo lado mangas de envase (S) para la fabricación de envases compuestos, en particular envases compuestos de cartón/plástico, mediante […]
Máquina de envasado por embutición profunda, del 15 de Abril de 2020, de MULTIVAC Sepp Haggenmüller SE & Co. KG: Máquina de envasado por embutición profunda que comprende: una estación de conformado con una herramienta conformadora para formar concavidades en […]
 Método para producir y llenar un recipiente de envase, del 29 de Enero de 2020, de Å&R Carton Lund AB: Un método para producir y llenar un recipiente de envase de cartón con material pulverulento en donde el método comprende las etapas […]
Método para producir y llenar un recipiente de envase, del 29 de Enero de 2020, de Å&R Carton Lund AB: Un método para producir y llenar un recipiente de envase de cartón con material pulverulento en donde el método comprende las etapas […]
Dispositivos para envasar bandejas, del 29 de Enero de 2020, de Scolaro, Mauro: Un dispositivo para envasar bandejas, que comprende una estación de termosellado y corte para termosellar una película en el borde […]
Dispositivo, en particular para cerrar una zona de la cabeza de un recipiente de productos alimenticios fabricado de un material laminado que tiene una zona del borde la cual está biselada y parcialmente plegada sobre sí misma, del 15 de Enero de 2020, de SIG TECHNOLOGY AG: Un dispositivo que comprende un primer elemento de fijación , un elemento de fijación adicional y un material compuesto plano plegado ; en el […]
Máquina cerradora de bandejas, del 1 de Enero de 2020, de MULTIVAC Sepp Haggenmüller SE & Co. KG: Máquina cerradora de bandejas con una estación de sellado , que comprende una parte superior de herramienta , un marco de apriete […]