MAQUINA ENVASADORA HORIZONTAL.
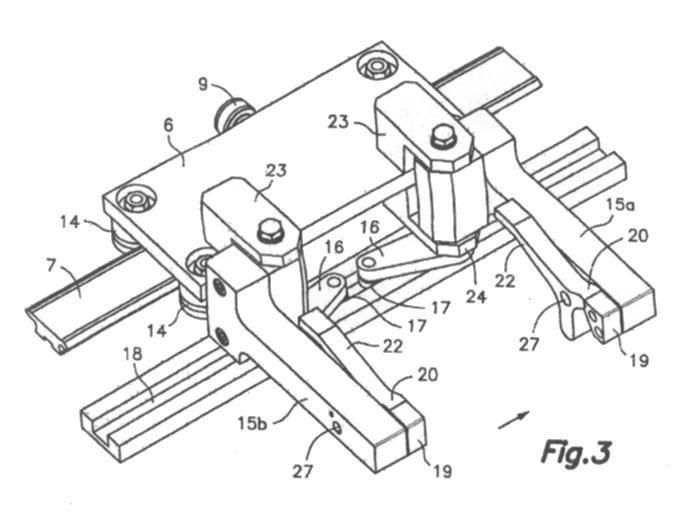
1. Máquina envasadora horizontal, del tipo que comprende:#una zona de trabajo (50) con sucesivas estaciones operativas (31-37) incluyendo al menos recepción,
apertura, dosificado, cierre y entrega de sobres;#un transportador de sobres (30) que comprende una pluralidad de parejas de pinzas delantera y trasera (1, 2) transportadas por unos medios de transporte a lo largo de un circuito cerrado que tiene un tramo de trabajo (3) a través de dichas estaciones operativas (31-37) y un tramo de retorno (4);#unos medios de suministro de sobres (55) vacíos a dicho transportador de sobres (30);#unos medios para cerrar las pinzas delantera y trasera (1, 2) de cada pareja al inicio de dicho tramo de trabajo (3) con el fin de agarrar un sobre (5) transferido desde dichos medios de suministro de sobres (55);#unos medios para acercar y alejar las pinzas delantera y trasera (1, 2) una de otra con el fin de abrir o cerrar la boca del sobre de acuerdo con los requerimientos de las mencionadas estaciones operativas (31-37) a medida que son atravesadas; y unos medios para abrir las pinzas delantera y trasera (1, 2) de cada pareja al final del tramo de trabajo (3) con el fin de soltar el sobre (5) y transferirlo a un transportador de salida (38);#caracterizada porque cada pareja de pinzas delantera y trasera (1, 2) está instalada sobre un carro (6) dispuesto para desplazarse libremente a lo largo de un dispositivo de guía (7) que define dicho circuito cerrado, estando dispuestos unos primeros medios de arrastre configurados para acoplarse con cada carro (6) al inicio del tramo de trabajo (3), arrastrar el carro (6) a lo largo del tramo de trabajo (3) con un primer tipo de movimiento y desacoplarse del carro (6) al final del tramo de trabajo (3) y unos segundos medios de arrastre configurados para acoplarse con cada carro (6) al inicio de dicho tramo de retorno (4), arrastrar el carro (6) a lo largo del tramo de retorno (4) con un segundo tipo de movimiento y desacoplarse del carro (6) al final del tramo de retorno (4), siendo dicho segundo tipo de movimiento más rápido que el primer tipo de movimiento.#2. Máquina, de acuerdo con la reivindicación 1, caracterizada porque dichos primeros medios de arrastre comprenden una leva de tambor (8) y dichos segundos medios de arrastre comprenden un elemento de tracción flexible (10).#3. Máquina, de acuerdo con la reivindicación 2, caracterizada porque el tramo de trabajo (3) es substancialmente rectilíneo y dicha leva de tambor (8) comprende una superficie cilíndrica de longitud substancialmente igual al tramo de trabajo (3) dispuesta para girar alrededor de un eje substancialmente paralelo al tramo de trabajo (3) y una ranura de leva (13) formada alrededor y a lo largo de dicha superficie cilíndrica.#4. Máquina, de acuerdo con la reivindicación 3, caracterizada porque dicho seguidor de leva (9) sobresale de una parte trasera del carro (6) y comprende un rodillo dispuesto para girar alrededor de un eje substancialmente perpendicular al eje de la leva de tambor (8) y configurado para insertarse en dicha ranura de leva (13) al inicio del tramo de trabajo (3), correr por la ranura de leva (13) a lo largo del tramo de trabajo (3) y salirse de la ranura de leva (13) al final del tramo de trabajo (3).#5. Máquina, de acuerdo con la reivindicación 2, 3 ó 4, caracterizada porque dichos segundos medios de arrastre comprenden un elemento de tracción flexible (10) provisto de unas configuraciones de arrastre (11) prominentes distribuidas a distancias regulares y cada carro (6) lleva una configuración de acoplamiento (12) configurada para acoplarse con una de dichas configuraciones de arrastre (11) al inicio del tramo de retorno (4), mantenerse acoplada con la configuración de arrastre (11) a lo largo del tramo de retorno (4) y desacoplarse de la configuración de arrastre (11) al final del tramo de retorno (4).#6. Máquina, de acuerdo con la reivindicación 5, caracterizada porque dicho elemento de tracción flexible (10) es un elemento de tracción flexible sinfín y está guiado y accionado para desplazarse paralelamente a dicho dispositivo de guía (7) a lo largo del tramo de retorno (4) y para apartarse del dispositivo de guía (7) en el tramo de trabajo (3).#7. Máquina, de acuerdo con la reivindicación 6, caracterizada porque el dispositivo de guía (7) está dispuesto en un plano geométrico substancialmente horizontal y dicho elemento de tracción flexible (10) se desplaza en otro plano geométrico substancialmente horizontal a un nivel más bajo que el dispositivo de guía (7).#8. Máquina, de acuerdo con la reivindicación 7, caracterizada porque dichas configuraciones de arrastre (11) comprenden unos tetones que sobresalen hacia arriba desde el elemento de tracción flexible (10) y las configuraciones de acoplamiento (12) comprenden unas horquillas que sobresalen hacia abajo desde los carros (6), teniendo cada horquilla un par de brazos configurados para albergar uno de dichos tetonesentre ambos.#9. Máquina, de acuerdo con una cualquiera de las reivindicaciones 5 a 8, caracterizada porque el elemento de tracción flexible (10) es una cadena de rodillos.#10. Máquina, de acuerdo con la reivindicación 6, caracterizada porque al inicio del tramo de trabajo (3) el elemento de tracción flexible (10) tiene un tramo de desacoplamiento (10a) que cruza por debajo de la leva de tambor (8) formando un ángulo con el eje de la leva de tambor (8) substancialmente igual al ángulo que forma una tangente a la ranura de leva (13) con el eje de la leva de tambor (8) en el punto más bajo de la misma y al final del tramo de trabajo (3) el elemento de tracción flexible (10) tiene un tramo de acoplamiento (10b) que cruza por debajo de la leva de tambor (8) formando un ángulo con el eje de la leva de tambor (8) substancialmente igual al ángulo que forma una tangente a la ranura de leva (13) con el eje de la leva de tambor (8) en el punto más alto de la misma.#11. Máquina, de acuerdo con la reivindicación 10, caracterizada porque el elemento de tracción flexible (10) comprende un tramo inactivo (10c) alejado del dispositivo de guía (7) entre el tramo de desacoplamiento (10a) y el tramo de acoplamiento (10b).#12. Máquina, de acuerdo con la reivindicación 10, caracterizada porque el elemento de tracción flexible (10) y la leva de tambor (8) están accionados sincronizadamente de manera tal que la configuración de acoplamiento (12) de cada carro (6) se desacopla de la correspondiente configuración de arrastre (11) del elemento de tracción flexible (10) substancialmente al mismo tiempo que el seguidor de leva (9) del mismo carro (6) se acopla con la ranura de leva (13) de la leva de tambor (8) al inicio del tramo de trabajo (3), y el seguidor de leva (9) de cada carro (6) se desacopla de la ranura de leva (13) de la leva de tambor (8) substancialmente al mismo tiempo que la configuración de acoplamiento (12) del mismo carro (6) se acopla con una configuración de arrastre (11) del elemento de tracción flexible (10) al final del tramo de trabajo (3).#13. Máquina, de acuerdo con la reivindicación 12, caracterizada porque la ranura de leva (13) de la leva de tambor (8) tiene un paso seleccionado para que los carros (6) acoplados a la ranura de leva (13) de la leva de tambor (8) se dispongan mutuamente adyacentes a lo largo del tramo de trabajo (3).#14. Máquina, de acuerdo con una cualquiera de las reivindicaciones 1 a 7, caracterizada porque el dispositivo de guía (7) comprende un carril y cada carro (6) lleva unas ruedas de giro libre (14) acopladas a dicho carril.#15. Máquina, de acuerdo con una cualquiera de las reivindicaciones 1 a 7, caracterizada porque las pinzas delantera y trasera (1, 2) están montadas sobre unos respectivos brazos pivotantes (15a, 15b) montados de manera que pueden pivotar individualmente en cada carro (6), donde cada uno de dichos brazos pivotantes (15a, 15b) está unido rígidamente a una respectiva palanca de leva (16)que tiene en su extremo libre un rodillo (17) insertado para correr en una ranura de leva (18) dispuesta a lo largo de al menos el tramo de trabajo (3), definiendo dicha ranura de leva (18) unos desplazamientos laterales en su trayectoria para ocasionar un acercamiento o alejamiento de las pinzas delantera y trasera (1, 2) la una de a la otra.#16. Máquina, de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizada porque los medios de suministro de sobres (55) comprenden un dispositivo formador de sobres (40) para formar sobres (5) a partir de una banda continua (41) de material laminar termosoldable procedente de una bobina (42) y un dispositivo de transferencia (43) para transferir los sobres (5) formados al transportador de sobres (30).#17. Máquina, de acuerdo con una cualquiera de las reivindicaciones 1 a 15, caracterizada porque los medios de suministro de sobres (55) comprenden un dispositivo alimentador de sobres (60) para alimentar sobres (5) desde un contenedor de almacenamiento (61) y un dispositivo de transferencia (62) para transferir los sobres (5) alimentados al transportador de sobres (30).
Tipo: Resumen de patente/invención.
Solicitante: MESPACK, S.L.
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: MARTI ROCHE,ENRIC, FITE SALA, MENNA, MORA FLORES,FRANCISCO.
Fecha de Publicación: .
Clasificación PCT:
- B65B43/42 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 43/00 Formación, alimentación, abertura o montaje de receptáculos o recipientes, en unión con el embalaje (formación de bolsas en las hojas, los elementos de envoltura o en las bandas, presionando el material en las matrices o desplazándolo sobre matrices de plegado B65B 47/00). › Alimentación o posicionado de sacos, cajas o envases de cartón en posición dilatada, abierta o de pie; Alimentación de receptáculos preformados rígidos, p. ej. latas, cápsulas, tubos de vidrio, frascos, hacia la posición de empaquetado; Colocación de receptáculos o recipientes en el puesto de llenado (por medio de bocas de llenado B65B 39/00 ); Sujeción de los receptáculos o recipientes durante el llenado (por bocas de llenado B65B 39/00).
Patentes similares o relacionadas:
 Procedimiento para la apertura automática de un medio de soporte, así como un dispositivo para la realización del procedimiento, del 24 de Junio de 2020, de FERAG AG: Procedimiento para la apertura automática de medios de soporte y la puesta a disposición de los medios de soporte en medios auxiliares de carga y de transporte […]
Procedimiento para la apertura automática de un medio de soporte, así como un dispositivo para la realización del procedimiento, del 24 de Junio de 2020, de FERAG AG: Procedimiento para la apertura automática de medios de soporte y la puesta a disposición de los medios de soporte en medios auxiliares de carga y de transporte […]
Túnel de empacado ajustable, del 22 de Abril de 2020, de Cullen, Steven R: Un túnel ajustable de una máquina de empacado móvil , el túnel que comprende: una base expandible que tiene un primer y segundo extremos, […]
Máquina estuchadora, del 7 de Noviembre de 2019, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Máquina estuchadora para empaquetar uno o más productos (P) en una caja de cartón respectiva que incluye un transportador de productos para transportar […]
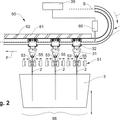
ENCAJADORA AUTOMÁTICA DE PRODUCTOS CON DISPOSITIVO DE VIBRACIÓN PARA LA OPTIMIZACIÓN DE LA CARGA EN CAJAS Y CONTENEDORES., del 21 de Junio de 2017, de KEELTEK ENGINEERING SOLUTIONS, S.L.L: 1. Encajadora automática de productos con dispositivo de vibración para la optimización de la carga en cajas y contenedores caracterizado por comprender medios para el transporte […]
Máquina de envasado y procedimiento de envasado, del 31 de Mayo de 2017, de TOYO JIDOKI CO., LTD.: Una máquina de envasado que comprende: una unidad de transporte de tipo lineal que transporta una bolsa de envasado de forma lineal […]
Sistema de preparación de bolsas completamente automatizado para diversos tipos de bolsas, del 22 de Febrero de 2017, de Premier Tech Technologies Ltée: Un sistema de preparación de bolsas para procesar en un equipo de envasado, que comprende: un dispositivo de desplazamiento para desplazar una bolsa entre […]
Transporte robotizado y sistema de transferencia, del 15 de Febrero de 2017, de Premier Tech Technologies Ltée: Un sistema para transferir y transportar un envase flexible lleno que tiene una parte superior y una parte inferior, comprendiendo el sistema: […]
Máquinas de envasar con cargador de tambor sincronizado de recogida dividida, del 14 de Diciembre de 2016, de GRAPHIC PACKAGING INTERNATIONAL, INC.: Máquina de envasar de movimiento continuo para envasar grupos de de artículos en cajas de cartón (CT) cuando las cajas (CT) se desplazan en dirección descendente , […]