MAQUINA EMPAQUETADORA DE GRUPOS DE ENVASES.
1. Máquina empaquetadora de grupos de envases, del tipo que comprende un transportador (1) para transportar envases (E);
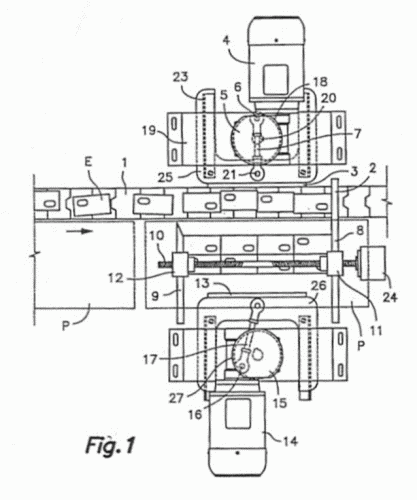
un tope de avance (2) dispuesto para interferir el avance de dichos envases (E) sobre el transportador (1) de manera que los envases se juntan formando una hilera; un empujador (3) guiado para efectuar un movimiento en una dirección perpendicular a la dirección de avance del transportador (1); unos medios de accionamiento conectados operativamente para accionar dicho empujador (3) con el fin de desplazar sucesivamente las hileras de envases (E) desde sobre el transportador (1) hasta sobre una plantilla plana (P) de caja de cartón colocada por un dispositivo de colocación de plantillas en una zona de preempaquetado donde las hileras se juntan formando una matriz; y un dispositivo plegador para plegar unas aletas de dicha plantilla plana (P) sobre la matriz de envases (E) para empaquetar la matriz de envases (E) en una caja de cartón formada a partir de la plantilla (P), caracterizada porque dichos medios de accionamiento del empujador (3) comprenden un motor eléctrico (4) conectado operativamente para accionar una manivela (5) acoplada mediante una muñequilla excéntrica (6) al pie de una biela (7) que tiene su cabeza conectada articuladamente al empujador (3).
2. Máquina, de acuerdo con la reivindicación 1, caracterizada porque comprende una pared de guía delantera (8), la cual está unida a dicho tope de avance (2) como prolongación del mismo y dispuesta perpendicularmente a la dirección de avance del transportador (1) a lo largo de un extremo delantero de dicha zona de preempaquetado; y una pared de guía trasera (9) dispuesta perpendicularmente a la dirección de avance del transportador (1) a lo largo de un extremo trasero de dicha zona de preempaquetado, estando dispuesto un mecanismo de ajuste para adaptar la posición del tope de avance (2) así como la distancia de separación entre dichas paredes de guía delantera y trasera (8, 9) a diferentes tipos de envases y/o a diferente número de envases en cada hilera.
3. Máquina, de acuerdo con la reivindicación 2, caracterizada porque dicho mecanismo de ajuste comprende un husillo (10) que tiene dos porciones fileteadas de rosca en sentidos opuestos acopladas a unas tuercas (11, 12) unidas a las paredes de guía delantera y trasera (8, 9), respectivamente, y unos medios para hacer girar dicho husillo (10) en uno u otro sentido.
4. Máquina, de acuerdo con la reivindicación 3, caracterizada porque dichos medios para hacer girar dicho husillo (10) en uno u otro sentido comprenden al menos un motor (24) controlado para realizar una operación de ajuste de forma automática.
5. Máquina, de acuerdo con la reivindicación 1, 2, 3 ó 4, caracterizada porque comprende una pared lateral móvil (13) enfrentada al empujador (3) en el lado opuesto de la zona de preempaquetado, estando dicha pared lateral móvil (13) guiada para efectuar un movimiento en una dirección perpendicular a la dirección de avance del transportador (1) y accionada por un segundo motor eléctrico (14) conectado operativamente para accionar una manivela (15) acoplada mediante una muñequilla excéntrica al pie de una biela (16) que tiene su cabeza conectada articuladamente a la pared lateral móvil (13).
6. Máquina, de acuerdo con la reivindicación 1, caracterizada porque comprende unos primeros medios de detección para detectar un número predeterminado de envases (E) en dicha hilera, y unos medios electrónicos programados para detener el transportador (1) y activar el motor eléctrico (4) de los medios de accionamiento del empujador para realizar un ciclo de accionamiento del empujador (3) cuando dichos primeros medios de detección han detectado dicho número predeterminado de envases (E) en la hilera; y unos segundos medios de detección para detectar un número predeterminado de hileras de envases (E) en dicha matriz, estando dichos medios electrónicos programados para activar un dispositivo de transferencia para introducir la plantilla plana (P) junto con la matriz a dicho dispositivo plegador y seguidamente activar dicho dispositivo de colocación de plantillas para colocar una nueva plantilla plana (P) en dicha zona de preempaquetado cuando dichos segundos medios de detección han detectado dicho número predeterminado de hileras en la matriz.
Tipo: Resumen de patente/invención.
Solicitante: ERRA SERRABASA,JOSEP MARIA
MORRAL FALCON,PEDRO.
Nacionalidad solicitante: España.
Provincia: GIRONA.
Inventor/es: ERRA SERRABASA,JOSEP MARIA, MORRAL FALCON,PEDRO.
Fecha de Solicitud: 27 de Octubre de 2005.
Fecha de Publicación: .
Fecha de Concesión: 16 de Mayo de 2006.
Clasificación PCT:
- B65B41/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 41/00 Suministro o alimentación de hojas para formar el receptáculo o de material para envolver. › por empujadores oscilantes o de movimiento alternativo.
Patentes similares o relacionadas:
Dispositivo para el zunchado de paquetes, del 17 de Septiembre de 2014, de SPG Packaging Systems GmbH: Dispositivo para el zunchado de paquetes , - con una mesa de empaquetar , sobre cuyo lado superior está alojado el paquete a […]