MÁQUINA DIGITALIZADORA TRIDIMENSIONAL POR CONTACTO.
Se describe una máquina digitalizadora tridimensional para reproducir la geometría de un objeto soportado en un eje giratorio extendido según la dirección longitudinal de la máquina.
Un carro desplazable por guías en una dirección paralela con la de dicho eje giratorio, sustenta al menos dos palpadores diferentes de acción combinada, consistente en un toroide para palpar las zonas con concavidades del objeto, y una barra para palpar las zonas con convexidades cielo objeto, estando cada uno de los palpadores asociado a un conjunto rotativo respectivo compuesto por un pequeño motor de corriente continua y un encóder asociado. Alternativamente, los palpadores pueden estar unidos al eje principal mediante elementos lineales.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200803633.
Solicitante: LEDESMA LATORRE,SANTIAGO.
Nacionalidad solicitante: España.
Inventor/es: LEDESMA LATORRE,SANTIAGO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A43D35/00 NECESIDADES CORRIENTES DE LA VIDA. › A43 CALZADOS. › A43D MAQUINAS, HERRAMIENTAS, EQUIPOS O PROCEDIMIENTOS PARA LA FABRICACION O LA REPARACION DEL CALZADO (costura D05B). › Prensas para conformado de suelas monobloc, bajos de calzado o suelas unidas a los bajos de calzado (encolado de las suelas a la base del calzado A43D 25/06).
- B23Q1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad).
- B44B1/02 B […] › B44 ARTES DECORATIVAS. › B44B MAQUINAS, APARATOS O UTILES PARA TRABAJOS DE ARTE, p. ej. PARA ESCULPIR, ENTALLAR, CINCELAR, PIROGRABAR O MARQUETEAR (decoración del cuero C14B). › B44B 1/00 Máquinas o aparatos de artistas equipados de útiles o de soportes de la obra, susceptibles de ser desplazados según las tres dimensiones para producir individualmente formas o esculturas (dispositivos de copiado para máquinas herramienta B23Q 35/00). › para hacer reproducciones de tres dimensiones.
- G01B5/016 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 5/00 Disposiciones de medida caracterizadas por la utilización de medios mecánicos (instrumentos de los tipos cubiertos por el grupo G01B 3/00 en sí G01B 3/00). › Detalles constructivos de los contactos.
- G01B5/20 G01B 5/00 […] › para la medida de contornos o curvaturas.
- G05B19/4099 G […] › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Mecanizado de superficie o de curva, fabricación de objetos en tres dimensiones (3D), p. ej. fabricación asistida por computador.
PDF original: ES-2360545_A1.pdf
Fragmento de la descripción:
Máquina digitalizadora tridimensional por contacto.
Objeto de la invención
La presente invención se refiere a una máquina digitalizadora tridimensional por contacto, que aporta esenciales características de novedad y notables ventajas con respecto a los medios conocidos y utilizados para los mismos fines en el estado actual de la técnica.
Más en particular, la invención propone el desarrollo de una máquina digitalizadora tridimensional capacitada para determinar con precisión la silueta de un objeto examinado mediante la información proporcionada por medio de la acción combinada de dos elementos de palpado diferenciados de actuación combinada, a saber un toroide y una barra posicionados con un desfase predeterminado en el eje principal de digitalización. El toroide se encarga de tocar las zonas que presentan concavidades, mientras que otras zonas, por ejemplo en las que se localizan convexidades y más alejadas de la zona de sujeción de la pieza que se desea reproducir, son palpadas por la barra.
El campo de aplicación de la invención se encuentra comprendido en el sector industrial de la digitalización de piezas tridimensionales en general, con aplicación especial al caso de las hormas para calzado u otras piezas con formas geométricas tridimensionales que cumplan una serie de restricciones.
Antecedentes y Sumario de la invención
En el campo de la digitalización de piezas en 3D, se conocen en el estado actual de la técnica una serie de aparatos y métodos que desde un punto de vista general, podrían agruparse de la siguiente manera:
Dispositivos láser,
Dispositivos ópticos con luz estructurada,
Dispositivos ópticos con luz blanca (no estructurada),
Dispositivos con palpación mecánica.
Cada uno de los dispositivos mencionados ha cumplido en cada momento con la función para la que fueron desarrollas, aunque no por ello están exentos de inconvenientes prácticos que bajo determinadas condiciones de uso, pueden afectar negativamente a la eficacia de los mismos. Así, mientras los dispositivos ópticos en general tienen la ventaja de que no necesitan tocar la superficie del objeto para lograr captar su geometría, presentan sin embargo serios problemas en relación con dos aspectos fundamentales: angulaciones extremas y diferencias en el color/textura u opacidad de la superficie.
Debido a que el spot de digitalización es siempre necesariamente mayor que la precisión requerida, los sistemas de digitalización óptica utilizan un valor promediado del spot para el cálculo de las posiciones tridimensionales. Este promediado hace que cuando el spot cae en una zona de transición entre colores claros y oscuros, la media vaya siempre hacia las zonas claras, desvirtuando la posición.
Por otra parte, debido efectos de contaminación de píxeles, los bordes de los objetos y las zonas de gran angulación generan superficies falsas.
Adicionalmente, los objetos semi-transparentes tienen, además de estos problemas mencionados, otros asociados al hecho de que la luz penetra una distancia desconocida en la superficie, y que depende de una gran multitud de factores, distorsionando las posiciones reales.
En cuanto a los dispositivos de palpación mecánica, tienen la ventaja de que no ven alterada la geometría del objeto debido a cambios superficiales o ángulos límite. Sin embargo, presentan por el contrario el inconveniente de que han de ejercer necesariamente una determinada presión sobre el objeto, y además no permiten digitalizar superficies con concavidades cuyo radio es inferior al radio efectivo con el que la superficie de palpación toca el objeto. Como ejemplo se puede aludir al caso de las hormas para calzado, por ser éste uno de los sectores en el que los sistemas de digitalización mediante palpador se encuentran más extendidos. En el caso concreto de las hormas para calzado, los dispositivos de sujeción mantienen la horma cogida por dos puntos, a saber, la parte trasera (talón) y la parte delantera (puntera). En consecuencia, debido a la presencia de estos amarres, no es posible discernir la geometría real de la horma respecto a los propios sistemas de sujeción, obteniendo como resultado una figura digitalizada que posee unos soportes que se conocen en el argot como "pezones". Tradicionalmente, esto no ha representado un problema debido a que en la fase de torneado, las piezas son también cogidas por los extremos, reproduciéndose los mismos soportes o pezones.
Sin embargo, con la llegada de nuevas tecnologías basadas en sistemas electrónicos para el torneado, se hace necesaria la digitalización de la horma entera, sin la presencia de estos soportes.
Una posible forma de solucionar el problema utilizada en el estado actual de la técnica, consiste en sujetar la horma para calzado desde la parte superior de la misma, de modo que la zona del talón queda completamente libre. Sin embargo, debido a la configuración de la parte de puntera de la horma, especialmente en el caso de hormas de tacón alto, hacen que esa parte delantera quede muy alejada del eje de torneado, por lo que el palpador no puede tocarla.
Otro problema asociado a la situación planteada en el supuesto anteriormente comentado, consiste en que, en caso de que la zona de puntera de la horma pueda llegar a ser tocada con el palpador toroidal, se ejerce una presión tal sobre la zona de contacto que es considerable debido a la gran distancia existente entre dicha zona de contacto y el punto de amarre, lo que puede provocar determinadas aberraciones en la geometría escaneada.
Para solucionar estos problemas, algunos fabricantes han recurrido a la utilización de sistemas de digitalización óptica, ya sea con láser o ya sea con otras técnicas de triangulación o estereoscópicas. Sin embargo, esto exige que la pieza deba estar completamente pintada, o presentar una superficie muy homogénea o con un alto nivel de opacidad.
Adicionalmente, los sistemas de este tipo requieren un gran número de ejes de control numérico, complicando con ello su diseño y elevando el precio final del conjunto.
Teniendo en cuenta los inconvenientes existentes en el estado actual de la técnica y mencionados brevemente en lo que antecede, la presente invención se ha propuesto como objetivo principal el diseño y construcción de una máquina digitalizadora tridimensional, del tipo de las que funcionan por contacto, mediante la que se aportan soluciones eficaces a los problemas actuales. Este objetivo ha sido plenamente alcanzado mediante la máquina que va a ser objeto de descripción en lo que sigue, cuyas características principales están recogidas en la porción caracterizadora de la reivindicación 1 anexa.
En esencia, la máquina digitalizadora tridimensional propuesta por la invención es del tipo de las que actúan por contacto con la pieza cuya silueta se desea determinar con precisión, pero a diferencia con las máquinas habituales conocidas, la invención plantea la provisión de una máquina en la que intervienen dos elementos de palpado: un elemento de toroide y un elemento de barra. El toroide está destinado a palpar las zonas con concavidades en las que se exige un radio de curvatura tal que permita adaptarse a las diferentes curvaturas de la pieza, como puede ocurrir, en el ejemplo utilizado de una horma para calzado, en las partes traseras del tacón de la horma, mientras que el elemento de barra, vinculado al mismo eje operativo que el toroide pero en una posición desplazada longitudinalmente con respecto a este último, se utiliza para palpar las zonas con convexidades de la pieza, especialmente la parte delantera (puntera) de la horma. Así, una horma sujeta por la parte superior de la misma, puede ser perfectamente palpada en su totalidad según rota respecto al eje al que se encuentra fijada, con la particularidad adicional de que la barra ejerce una presión ligera sobre la pieza evitando de ese modo los efectos generadores de aberraciones presentes en las máquinas actuales.
Breve descripción de los dibujos
Estas y otras características y ventajas de la invención se pondrán más claramente de manifiesto a partir de la descripción detallada que sigue de un ejemplo de realización preferida de la misma, dado únicamente a título ilustrativo y no limitativo, con referencia a los dibujos que se acompañan, en los que:
Las Figuras 1 y 2 son vistas, ligeramente en perspectiva, tomadas des un lateral y desde una posición latero-superior,... [Seguir leyendo]
Reivindicaciones:
1. Máquina digitalizadora tridimensional por contacto, para la reproducción precisa de la geometría tridimensional de un objeto (5) sometido a rotación en torno a un eje extendido según la dirección del eje longitudinal de la bancada (1) de la máquina, caracterizada porque el mencionado objeto (5) cuya geometría va reproducida tridimensionalmente está sujeto por un punte predeterminado del mismo que deja libre las zonas con concavidades y convexidades del mismo, a través de un útil de fijación acoplado al extremo de un eje (3) giratorio impulsado por medio de un motor (4), incluyendo la máquina un carro (6) desplazable longitudinalmente a lo largo de guías (5) incorporadas en la bancada (1) por accionamiento desde un motor (8) a través de un husillo, siendo el desplazamiento de dicho carro (6) paralelo a la dirección longitudinal del mencionado eje (3) giratorio, e incorporando el mencionado carro (6) dos elementos palpadores constituidos por un toroide (12) unido al extremo de un brazo (11) y previsto para palpar las zonas del objeto (5) con concavidades, y por una barra (15) prevista para palpar las zonas del objeto (5) con convexidades, estando cada uno de los mencionados elementos palpadores asociado a un conjunto rotativo.
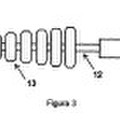
2. Máquina según la reivindicación 1, caracterizada porque un primer conjunto rotativo previsto transmitir al toroide (12) una leve presión de palpado incluye un primer motor (9) pequeño de corriente continua asociado a un primer dispositivo (10) de encóder, y porque un segundo conjunto rotativo previsto para transmitir a la barra (15) una leve presión de palpado está constituido por un segundo motor (13) pequeño de corriente continua asociado a un segundo dispositivo de encóder (14).
3. Máquina según la reivindicación 1, caracterizada porque los dispositivos palpadores (12, 15) están vinculados a la máquina mediante elementos lineales.
4. Máquina según las reivindicaciones 1 a 3, caracterizada porque el número y la posición de los elementos palpadores (12, 15) son variables.
5. Máquina según una o más de las reivindicaciones anteriores, caracterizada porque los palpadores (12, 15) son susceptibles de alejamiento y acercamiento al eje (3) de digitalización mediante otros ejes controlados adicionales al eje principal de movimiento.
Patentes similares o relacionadas:
Sistema de medición óptica, del 10 de Junio de 2020, de METRONOR A/S: Un sistema para la medición de coordenadas espaciales y/o la orientación de una sonda , que comprende: a) un primer sensor de dirección espacial […]
 Aparato y procedimiento de formación de imágenes intracraneales, del 30 de Octubre de 2019, de Archeoptix Biomedical Inc: Un aparato de formación de imágenes, que comprende:
una red de al menos tres transceptores electromagnéticos coplanarios que definen un plano de recepción;
al menos […]
Aparato y procedimiento de formación de imágenes intracraneales, del 30 de Octubre de 2019, de Archeoptix Biomedical Inc: Un aparato de formación de imágenes, que comprende:
una red de al menos tres transceptores electromagnéticos coplanarios que definen un plano de recepción;
al menos […]
Medición de tornillos sin fin, del 28 de Agosto de 2019, de Gleason Metrology Systems Corporation: Procedimiento para determinar un radio de raíz mínimo de un elemento de tornillo sin fin de una transmisión de tornillo sin fin , teniendo dicho […]
Aparato de incisión de escápula, del 14 de Noviembre de 2018, de MAYEKAWA MFG. CO., LTD.: Un aparato para la realización de incisiones escapulares para separar una porción de carne unida a una escápula de una carcasa (W) de ave de corral de dicha escápula, que […]
Plantilla de control de la geometría de perfiles conformados y/o curvados, del 29 de Marzo de 2017, de JAUBJAUB CONSULTING SARL: Plantilla de control de la geometría de los perfiles (T) conformados y/o curvados que presentan tramos rectos y tramos curvados, dicha plantilla de control está compuesta por […]
Dispositivo y procedimiento para la verificación de roscas, del 18 de Enero de 2017, de ARTIS GmbH: Dispositivo para la verificación de roscas , que presenta: a. un mandril de prueba que se puede enroscar en una rosca tallada por una máquinaherramienta; […]
 DISPOSITIVO DE MEDICIÓN ANTROPOMÉTRICA, del 2 de Julio de 2015, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Dispositivo de medición antropométrica para medir el diámetro interior de la "circunferencia de agarre", que permite una mayor precisión en la medición […]
DISPOSITIVO DE MEDICIÓN ANTROPOMÉTRICA, del 2 de Julio de 2015, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Dispositivo de medición antropométrica para medir el diámetro interior de la "circunferencia de agarre", que permite una mayor precisión en la medición […]
Aparato de lectura de la geometría de un aro o de un arco de montura de gafas y procedimiento de lectura correspondiente, del 19 de Noviembre de 2014, de ESSILOR INTERNATIONAL COMPAGNIE GENERALE D'OPTIQUE: Procedimiento de preparación de una lente oftálmica con vistas a su montaje en un aro o un arco de una montura de gafas , presentando […]