Máquina clasificadora para cajas con paredes laterales abatibles.
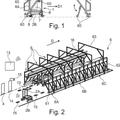
Máquina clasificadora para cajas con paredes laterales abatibles compuesta por una cinta transportadora (1) para la alimentación de las cajas (1),
una estación de elevación (B) con el fin de determinar el modelo de caja y los posibles defectos en la caja individual mientras que ésta se encuentra en la zona de topes (4), y por una serie de estaciones de apilado (C) para los modelos individuales de cajas, con una expulsión de las cajas defectuosas, estando dichas estaciones de apilado equipadas con correas de transporte (5e), caracterizada porque el movimiento de transporte (1a) para las cajas (A) desde la cinta transportadora de alimentación (1) hasta las correas de transporte (5e) de las estaciones de apilado (C) se genera mediante al menos un rodillo (3) que gira alrededor de un eje vertical por cada lado, actuando este rodillo lateralmente sobre los bordes opuestos entre sí de las cajas (A) individuales alimentadas (3r), siendo la rotación (3a) del rodillo (3) a ambos lados independiente de los movimientos de la cinta transportadora de alimentación (1) y de aquéllos de las correas de transporte (5e).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12007490.
Solicitante: Tanzer Maschinenbau S.r.l.
Nacionalidad solicitante: Italia.
Dirección: Via Josef Aigner, 1 39011 Lana (BZ) ITALIA.
Inventor/es: TANZER,PETER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B07C5/36 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B07 SEPARACION DE SOLIDOS; CLASIFICACION. › B07C CLASIFICACION POSTAL; CLASIFICACION DE OBJETOS INDIVIDUALES O DE UN MATERIAL A GRANEL MANIPULABLE PIEZA POR PIEZA COMO OBJETOS INDIVIDUALES (especialmente adaptada a un fin determinado previsto en otra clase, ver la clase apropiada, p. ej. A43D 33/06, B23Q 7/12). › B07C 5/00 Clasificación según una característica o una particularidad de los objetos o del material a clasificar, p. ej. clasificación controlada por un dispositivo que detecta o mide esta característica o particularidad; Clasificación con ayuda de dispositivos manuales, p. ej. sistemas de agujas (clasificación exclusivamente manual B07C 7/00; separación de diferentes sólidos unos de otros por cribado, tamizado o utilización de corrientes de gas, u otra separación por vía seca para materiales a granel B07B; selección de monedas G07D). › Aparatos clasificadores caracterizados por los medios que utilizan en vista de la distribución.
PDF original: ES-2535123_T3.pdf
Fragmento de la descripción:
Máquina clasificadora para cajas con paredes laterales abatibles
Son conocidas, por ejemplo, por las patentes DE-A-102 40 398, EP-A-2 340 894, DE-A-100 21 802, EP-A-0 247 408 o FR-A-2 807 009 máquinas clasificadoras para cajas de plástico con paredes laterales abatibles que realizan elevaciones mecánicas y/u ópticas en las cajas alimentadas de manera individualizada para poder determinar mediante algunas características con respecto a la construcción y/o las medidas el respectivo modelo de las cajas y también posibles cajas defectuosas para alimentarlas a las respectivas estaciones de apilado o a una estación común de desechos.
Después de que en las máquinas clasificadoras conocidas se realizan las elevaciones mecánicas de las cajas durante el transporte adicional de las mismas o bien durante la parada de las mismas, las cajas tienden a adoptar a este respecto posiciones diferentes con respecto a la posición de medición exactamente establecida, produciéndose diferentes errores de medición que provocan errores de clasificación y de apilado y a menudo también enganches. Asimismo, la elevación óptica provoca a menudo que las paredes laterales o bases sólo ligeramente deformadas de una caja provoquen el desechado de la misma aunque esta caja en realidad fuera aún completamente funcional. Debido a que el apilado se realiza según modelos individuales a través de émbolos que actúan desde abajo, las máquinas conocidas tienen medidas considerables, estando además previstas para el apilado de las cajas pequeñas (300 x 400) en pozos de apilado específicos que a menudo no se usan. A menudo, la velocidad de trabajo de las máquinas clasificadoras conocidas no es lo suficientemente elevada, por lo que la velocidad de trabajo limitada de la máquina clasificadora influye en el rendimiento de toda la instalación en una instalación de mecanizado compleja como, por ejemplo, una instalación de lavado de cajas.
La invención tiene el objetivo de crear una máquina clasificadora para cajas con paredes laterales abatibles del tipo mencionado al inicio para mejorar a este respecto el sistema de elevación y la velocidad de trabajo, reducir las medidas globales de la máquina y crear la posibilidad de que cada uno de los pozos de apilado para cajas grandes (600 x 400) se pueda convertir en un pozo de apilado para cajas pequeñas (300 x 400).
Para conseguir este objetivo, la invención propone que la elevación del modelo de caja o de las cajas dañadas alimentadas individualmente a la máquina clasificadora se realice exclusivamente de una manera mecánica con la caja parada que adopta una posición absolutamente definida aunque la alimentación a esta posición de elevación definida y también el siguiente transporte a la estación de apilado o a la estación de desechos se realicen a una elevada velocidad. Además, la Invención propone que cada una de las estaciones de apilado se alimente mediante elevadas velocidades de alimentación de las cajas individuales y, concretamente, de manera Independiente de los cambios de la velocidad que experimente la caja durante la alimentación a y durante la evacuación de la estación de elevación y de manera independiente de la parada, también sólo muy breve, de la caja durante la fase de elevación.
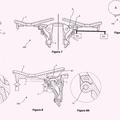
Según la invención, la caja, que se alimenta sobre una cinta transportadora de la estación de elevación, se detecta al menos en un lado por rodillos laterales con un eje de giro vertical que actúan lateralmente en los bordes laterales de las cajas para deslizarías contra dos topes mecánicos dispuestos según una línea de manera transversal al movimiento hacia delante de la caja. Dichos topes se pueden mover vertlcalmente a través de unas aberturas previstas en la placa de apoyo horizontal para la caja, adoptando estos topes la posición activa sobresaliente desplegada una vez que se acerque una caja y se retraen a la posición retraída una vez que se haya realizado la elevación en la caja.
Después de una breve parada de la caja, que se apoya con el borde anterior en los topes que se pueden mover de modo vertical y durante la que se realiza la elevación mecánica conocida mediante palpadores presionados de manera elástica contra la caja situada por debajo y, como consecuencia de la retracción de dichos topes, los rodillos de transporte laterales empujan en la dirección de las correas de transporte laterales o de los grupos de rodillos de transporte laterales que están previstos a ambos lados longitudinales de una serie de pozos de apilado orientados entre sí según la dirección de transporte de las cajas.
Según la Invención, al menos dos rodillos de transporte aceleran el movimiento de la caja una vez que se haya retirado de la cinta transportadora de alimentación para llevarla dentro del menor tiempo posible con el borde anterior a una posición cerca de los dos topes que sobresalen de la placa de apoyo. A continuación de la adopción de dicha posición cerca de los topes se ralentiza el movimiento de la caja hasta que dicho borde anterior se apoye en los topes. Como consecuencia del contacto del borde anterior en ambos topes se sujeta la caja en esta posición de apoyo porque los rodillos la deslizan con un par de giro determinado contra los topes. Este desarrollo según la invención asegura la colocación exacta y la sujeción sin movimiento de la caja para la realización de las elevaciones eficaces y exactas en la caja alimentada que se realizan en el momento en el que los rodillos presionan la caja contra los topes. Esta elevación se realiza mediante una serie de palpadores conocidos que se presionan elásticamente contra la superficie superior de la caja situada por debajo con paredes laterales cerradas por abatimiento.
Una vez que esté efectuada la elevación y los topes estén desplazados a la posición retraída, la caja se desliza mediante los mismos rodillos en la dirección de las correas de transporte previstas lateralmente de la serie de pozos de apilado. Durante dicho transporte adicional, los rodillos aceleran el movimiento de la caja de Om/seg. hasta una velocidad que es idéntica a la velocidad de las correas de transporte para el siguiente transporte adicional de la caja en la dirección hacia los pozos de apilado.
Según la invención, dichos rodillos laterales se pueden sustituir por al menos una cinta transportadora por cada lado, por lo que se consigue una superficie de apoyo más grande en el borde lateral de la caja.
Según la invención, las cintas transportadoras para las cajas, que están previstas a lo largo de los pozos de apilado dispuestos en alineación los unos detrás de los otros, pueden ser sólo dos, una en cada uno de los lados longitudinales de los pozos de apilado, o pueden estar previstas parejas de cintas específicas para cada uno de los pozos de apilado que están dispuestas de tal modo que la caja se transporta de una pareja de correas a la siguiente. Durante el transporte adicional de las cajas mediante dichas correas, éstas no se apoyan sobre una guía o un apoyo inferior. Dichas correas se presionan mediante grupos de rodillos lateralmente contra los bordes opuestos entre sí de las cajas, estando estos rodillos de apoyo montados en barras perfiladas que, a su vez, se pueden mover en la dirección hacia el borde de caja y se pueden hacer pivotar mediante cilindros neumáticos que actúan en las zonas de extremo de cada barra perfilada. En particular el movimiento pivotante posibilita una adaptación considerable de las correas de transporte durante el paso de las cajas que tienen unas medidas con tolerancias de medida más bien amplias. Evidentemente, los rodillos de soporte se pueden sustituir por placas de soporte en las que discurre el lado posterior de las correas de transporte. Una vez que la caja alcance el pozo de apilado específico como consecuencia de las elevaciones realizadas, las correas de transporte se bloquean y se retraen las barras perfiladas en cuestión con los rodillos de soporte así como las propias correas de transporte, retirándose en el tramo de manera correspondiente al pozo de dicha estación de apilado del borde lateral de la caja, de tal modo que la caja puede caer libremente hacia abajo al interior de dicho pozo de apilado en el que se apilan las cajas de manera conocida en una primera fase en la zona superior del pozo de apilado que funciona como amortiguador para llegar, a continuación, al interior de la zona de apilado inferior en la que un apoyo accionado de manera vertical mediante correas dentadas se mueve hacia abajo en función del grupo de cajas retirado periódicamente de la zona de amortiguación superior para de este modo no interrumpir el apilado durante la extracción de una pila de cajas. Cada uno de los pozos de apilado puede estar equipado según la invención en la zona... [Seguir leyendo]
Reivindicaciones:
Máquina clasificadora para cajas con paredes laterales abatibles compuesta por una cinta transportadora (1) para la alimentación de las cajas (1), una estación de elevación (B) con el fin de determinar el modelo de caja y los posibles defectos en la caja individual mientras que ésta se encuentra en la zona de topes (4), y por una serie de estaciones de apilado (C) para los modelos individuales de cajas, con una expulsión de las cajas defectuosas, estando dichas estaciones de apilado equipadas con correas de transporte (5e), caracterizada porque el movimiento de transporte (1a) para las cajas (A) desde la cinta transportadora de alimentación (1) hasta las correas de transporte (5e) de las estaciones de apilado (C) se genera mediante al menos un rodillo (3) que gira alrededor de un eje vertical por cada lado, actuando este rodillo lateralmente sobre los bordes opuestos entre si de las cajas (A) individuales alimentadas (3r), siendo la rotación (3a) del rodillo (3) a ambos lados independiente de los movimientos de la cinta transportadora de alimentación (1) y de aquéllos de las correas de transporte (5e).
Máquina clasificadora según la reivindicación 1, caracterizada porque los rodillos (3) realizan durante el transporte adicional de las cajas (A) una aceleración del movimiento de transporte de las cajas hasta que el borde anterior de la caja se encuentre a poca distancia de los topes (4) desplegados en la posición activa para, a continuación, realizar una aproximación ralentizada de dicho borde de la caja a los dos topes con un empuje continuo contra dichos topes (4) para acelerar, después de la elevación realizada del modelo y posibles daños en la caja y como consecuencia de una retracción de los topes (4), la caja (A) en la dirección de transporte (1a) hasta una velocidad que se corresponde con la velocidad del movimiento (5f) de las correas (5e) para el transporte en la dirección de la estación de apilado (B).
Máquina clasificadora según las reivindicaciones 1 y 2, caracterizada porque los rodillos de transporte laterales (3) están sustituidos por al menos una correa de transporte paralela a la dirección de transporte (1a) por cada lado de la caja (A).
Máquina clasificadora según las reivindicaciones 1 y 2, caracterizada porque durante el transporte adicional (5f) de las cajas (A) en la dirección del pozo de apilado (5a, 5b) específico determinado por las elevaciones, éstas se sujetan entre dos correas (5e, 50e, 51 e) paralelas que se presionan contra los bordes opuestos entre sí paralelos a la dirección de transporte (1a) de la caja (A) mediante unas barras perfiladas (5p) equipadas con rodillos de apoyo (5h) o placas de deslizamiento y con elementos de retracción (5m) que actúan a ambos bordes exteriores de las correas (5e, 50e, 51 e), y porque la caída de la caja (A) al interior del pozo de apilado (5a, 5b) específico se realiza mediante una retracción (5n) de las correas (5e, 50e, 51 e) mediante las barras perfiladas (5p) correspondientes, junto con los rodillos de apoyo (5h) y los elementos de retracción (5m), que actúan en ambos bordes de las correas, y porque en cada una de dichas barras perfiladas (5p) actúan cilindros neumáticos (5i) en la zona de los dos extremos.
Máquina clasificadora según las reivindicaciones 1 y 2, caracterizada porque cada uno de los pozos (5a) está equipado con una pareja específica de correas de transporte (5e, 50e, 51 e) que se pueden mover (5n) transversalmente a la dirección de transporte de las cajas (A) junto con las barras perfiladas (5p) correspondientes junto con los rodillos de apoyo (5h) y se pueden hacer pivotar (5x) fácilmente con respecto a un eje vertical y porque las zonas de extremo de estas correas (5e, 50e, 51 e) terminan cerca del inicio de las siguientes correas (5e, 50e) del siguiente pozo de apilado (5a) de tal modo que está asegurado el cambio de la caja de una pareja de correas a la siguiente pareja de correas.
Máquina clasificadora según las reivindicaciones 1, 2 y 5, caracterizada porque cada pareja de las correas de transporte (5e, 50e, 51 e) se puede hacer pivotar junto con las barras perfiladas (5p) en cuestión y los rodillos de apoyo (5h) para cada pozo de apilado (5a) específico con respecto a un eje paralelo a la dirección de transporte de las cajas.
Máquina clasificadora según las reivindicaciones 1 y 2, caracterizada porque cada uno de los pozos de apilado (5a) para cajas grandes se puede dividir mediante un tabique de separación (5c), que se puede situar en una zona central de manera transversal y de manera perpendicular, en dos pozos (5b) adyacentes para el apilado de cajas pequeñas.
Máquina clasificadora según las reivindicaciones 1 y 2, caracterizada porque las correas de transporte (5e, 50e, 51 e) están equipadas con un borde longitudinal (5k) sobresaliente inferior, con solapas longitudinales (50k), con solapas transversales (51 k) o con salientes que se pueden deformar elásticamente en el lado que se apoya en las cajas (A) y porque los dos bordes longitudinales (5j, 50j, 51 j) más exteriores de dichas correas (5e, 50e, 51 e) no son de material similar a la goma, son lisos en la superficie dirigida a la caja y están dotados de dientes en la superficie posterior opuesta.
Patentes similares o relacionadas:
Procedimiento de recogida de objetos con robots lanzadera, del 22 de Abril de 2020, de SOLYSTIC: Procedimiento de procesamiento de objetos en un centro logístico que comprende una zona de almacenaje de los objetos dividida en segmentos de almacenaje adyacentes […]
Clasificación de aleaciones de aluminio mediante valores de conductividad eléctrica, del 15 de Abril de 2020, de Hydro Aluminium Recyling Deutshland GmbH: Procedimiento para clasificar aleaciones de aluminio en chatarra de aluminio, caracterizado por que las chatarras de aluminio se suministran a una estación de medición, […]
Sistema para embalaje automático de revistas y periódicos para cada vendedor de prensa individual, del 12 de Febrero de 2020, de Klotzner, Stefan: Sistema para embalaje automático de revistas y periódicos que consta de: - un módulo de suministro que se encuentra colocado al comienzo del sistema […]
 Equipo modular y desmontable para la clasificación automática en bolsas de paquetes, del 29 de Enero de 2020, de SOLYSTIC: Equipo para la clasificación de paquetes que comprende un soporte de receptáculos y al menos un carro robot lanzadera móvil mandado en desplazamiento […]
Equipo modular y desmontable para la clasificación automática en bolsas de paquetes, del 29 de Enero de 2020, de SOLYSTIC: Equipo para la clasificación de paquetes que comprende un soporte de receptáculos y al menos un carro robot lanzadera móvil mandado en desplazamiento […]
Procedimiento y sistema para la reducción activa de aceitunas mal posicionadas en las máquinas deshuesadoras, rellenadoras y rodajadoras de aceitunas., del 25 de Noviembre de 2019, de MADUEÑO LUNA, Antonio: Procedimiento y sistema para la reducción de aceitunas mal posicionadas en las máquinas deshuesadoras, rellenadoras y rodajadoras de aceitunas (DRR). Esta invención […]
Aparato de transporte con correa de vacío, del 24 de Julio de 2019, de QUALYSENSE AG: Un aparato para transportar partículas , incluyendo el aparato: una correa transportadora sinfín que tiene una pluralidad de […]
Dispositivo de selección para una máquina de elaboración de resortes y máquinas de elaboración de resortes provistas de dicho dispositivo de selección, del 10 de Julio de 2019, de Simplex Rapid S.r.l: El dispositivo de selección destinado a ser dispuesto aguas abajo de un dispositivo de elaboración de resortes de una máquina de elaboración de resortes, […]
 Soporte de artículos para un aparato de clasificación, del 28 de Junio de 2019, de Compac Technologies Limited: Un soporte de artículos que comprende:
una parte de montaje adaptada para la conexión a un transportador,
un elemento de conexión conectado de manera […]
Soporte de artículos para un aparato de clasificación, del 28 de Junio de 2019, de Compac Technologies Limited: Un soporte de artículos que comprende:
una parte de montaje adaptada para la conexión a un transportador,
un elemento de conexión conectado de manera […]