Máquina de agrupamiento de productos con vistas a su encajonado.
Máquina de agrupamiento de productos que incluye una cinta (2) transportadora de alimentación,
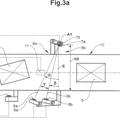
sobre la que los citados productos llegan en línea, cuya máquina comprende unos colectores (4), en forma de peines, dispuestos transversalmente con respecto al eje longitudinal (xx') de llegada de los productos (1), cuyos colectores (4) están animados de un movimiento cíclico poligonal para capturar, los unos a continuación de los otros, los citados productos para desplazarlos a continuación sobre una mesa (3) dispuesta lateralmente en donde el lote de productos es recogido con vistas a su encajonamiento, y para, finalmente, volver al punto de partida, caracterizada por que los citados colectores (4) están decalados verticalmente, unidos a unos rieles (8) que están dispuestos transversalmente con respecto al citado eje longitudinal (xx'), cuyos rieles (8) incluyen, cada uno, un carrito (7) móvil que lleva, por medio de un accionador (11), un colector (4), cuyos carritos (7) y accionadores (11) están superpuestos y son controlados por medio de un autómata (17) programable para controlar el citado movimiento cíclico poligonal de cada colector (4).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2010/052921.
Solicitante: SIDEL PARTICIPATIONS.
Nacionalidad solicitante: Francia.
Dirección: AVENUE DE LA PATROUILLE DE FRANCE 76930 OCTEVILLE SUR MER FRANCIA.
Inventor/es: GARNIER,THIERRY, DUCHEMIN,GUILLAUME, Mougin,Didier, GATOS,DAVID.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › espaciando o agrupando los objetos durante la alimentación (durante el transporte por el transportador B65G 47/28).
- B65G47/82 B65G 47/00 […] › Elementos de movimiento rotativo o alternativo que actúan directamente sobre los objetos o materiales, p. ej. empujadores, rastrillos, palas.
PDF original: ES-2485301_T3.pdf
Fragmento de la descripción:
E10808933
DESCRIPCIÓN
Máquina de agrupamiento de productos con vistas a su encajonado El presente invento se refiere a una máquina de agrupamiento de productos con vistas a su encajonado y, más particularmente, de productos del tipo botellas, frascos u otros.
El agrupamiento de productos del tipo frascos, botellas u otros, en la salida de una máquina etiquetadora, por ejemplo, puede efectuarse de diferentes maneras según la forma y la naturaleza de los productos y también según las cadencias deseadas.
Un primer ejemplo de máquina de agrupamiento está descrito sobre todo en el documento FR 2 918 359. En este documento, la máquina de agrupamiento incluye una cinta transportadora de alimentación de los productos, los cuales son alineados, uno detrás del otro, y son recogidos por un dispositivo colector, en forma de peine, que está dispuesto transversalmente con respecto al sentido longitudinal de llegada de los citados productos.
Los productos son capturados por los alvéolos de este colector que está animado de un movimiento de bucle para realizar, en un primer tiempo, la operación de captura de los productos y después, en un segundo tiempo, la operación de deposición del lote de productos capturados sobre una mesa que se extiende al lado de la cinta transportadora de alimentación, antes de volver, en un tercer tiempo, al punto de partida, para capturar el primer producto que llega con la citada cinta transportadora de alimentación.
Para realizar la operación de captura de los productos, el colector es móvil combinando dos movimientos: un movimiento transversal con respecto al sentido de llegada de los productos y un movimiento longitudinal paralelo a este sentido de llegada de los citados productos.
El movimiento longitudinal para la operación de captura de los productos se efectúa según un sentido que es el inverso al de la cinta transportadora de alimentación. Este movimiento longitudinal de avance permite al colector efectuar la captura de los productos al vuelo, remontando la fila de los citados productos que llegan con la cinta transportadora de alimentación; esta remontada sobre la cinta transportadora de alimentación permite a la citada cinta tomar ventaja y acumular tiempo para realizar el depósito de los productos capturados y efectuar el retorno a la casilla de partida antes de presentarse de nuevo frente al primer producto que llega sobre la citada cinta transportadora de alimentación.
Para la operación de transferencia, el movimiento del colector es simplemente transversal y a continuación, después del depósito del lote de productos capturados, el movimiento de retroceso es al principio longitudinal, al menos durante el tiempo de suelta del lote, y a continuación este movimiento es transversal para permitir al citado colector volverse a posicionar en el punto de partida, delante del primer producto aportado por la cinta transportadora de alimentación.
En este tramo de retorno al punto de partida, la velocidad longitudinal del colector es lo suficientemente elevada como para sobrepasar al producto que está en cabeza sobre la cinta transportadora de alimentación y cuya velocidad de avance es continua.
La máquina descrita en este documento permite también depositar el lote de productos capturados ya sea en un solo lado con respecto a la cinta transportadora de alimentación, ya sea en los dos lados, lo que permite obtener cadencias de agrupamiento relativamente elevadas.
Las tendencias actuales en materia de flexibilidad y de cadencias para las máquinas de agrupamiento de este tipo imponen limitaciones a los cuales cada vez es más difícil hacer frente.
En primer lugar, los movimientos combinados del colector para llevar a cabo el proceso de captura y de agrupamiento de los productos son relativamente complejos; por otra parte, para la máquina detallada en el documento FR citado anteriormente, se observan, entre dos secuencias de captura, tiempos muertos que son relativamente importantes y que es difícil de modificar mientras que la cadencia de llegada de los productos con la cinta transportadora de alimentación es mucho más fácil de administrar y puede beneficiarse de una velocidad uniforme que es susceptible de aumentar para mejorar las cadencias.
Para compensar los tiempos muertos al nivel de la captura de los productos, y conservar una cadencia suficiente, es necesario actuar sobre las velocidades y las aceleraciones del colector durante el periodo en el que está vacio, sobre todo. Estas aceleraciones, si se hacen demasiado violentas, generan vibraciones que pueden perjudicar la estabilidad de los productos que están sobre la máquina, lo que puede provocar incidentes.
Otro tipo de máquina de agrupamiento, como describe el documento EP 1 052 200, que corresponde al preámbulo de la reivindicación 1, permite capturar productos que llegan en línea sobre una cinta transportadora de alimentación. Los productos son capturados por medio de una serie de tres colectores, en forma de peines, que se suceden en el puesto de captura, delante de la llegada de los productos.
E10808933
Estos tres colectores están dispuestos al mismo nivel con respecto a la llegada de los productos y están fijos y son arrastrados por medio de un sistema que comprende dos cadenas sin fin que están decaladas transversalmente y que están situadas cada una de ellas en un plano horizontal, cuyos planos están decalados verticalmente una altura que es superior a la altura de los citados colectores. Los colectores recorren, al mismo tiempo, un bucle cerrado en el transcurso del cual cada colector captura los productos que llegan, y a continuación los deposita sobre una cinta lateral de evacuación, antes de volver al punto de partida pasando por detrás de los otros colectores que hacen, ellos también, el mismo recorrido.
Los tres colectores están unidos entre sí, formando una noria; sus puntos de unión sobre las cadenas de arrastre son fijos y existe una separación permanente entre dos colectores adyacentes de tal manera que, para la captura de los productos que llegan, hay o bien una parada de los productos sobre la cinta transportadora de alimentación, o bien una gestión particular de la velocidad y de las aceleraciones de los colectores.
El presente invento propone una máquina de agrupamiento de productos que permite, sobre todo para cadencias elevadas, ofrecer la posibilidad de reducir la velocidad de los movimientos de los colectores cuando están vacios y reducir las aceleraciones, lo que tiene como efecto limitar las vibraciones de estos colectores y de la máquina en general.
Los movimientos de cada colector son igualmente simplificados. Así, durante la fase de captura de los productos, cada colector está animado de un simple movimiento transversal con respecto al eje de llegada de los productos; no hay movimiento longitudinal combinado de remontada de la fila de productos como es el caso en el documento FR citado anteriormente y, con respecto al documento FR citado anteriormente, los productos pueden conservar una velocidad uniforme entre el momento en el que son separados unos de otros y el momento en el que se hacen cargo de ellos los alvéolos de un colector para formar el lote. Estos diferentes colectores, cuando están en acción, dan la impresión de una captura continua; forman una especie de colector sin fin, lo que permite prever una llegada regular de productos, sin tirones, a velocidad uniforme.
El presente invento propone también una máquina que permite responder de una manera casi universal a las demandas actuales en materia de flexibilidad, de prestaciones y sobre todo de seguridad de funcionamiento. Esta máquina puede adaptarse fácilmente a los diferentes tipos de productos a reagrupar, así como a la dimensión de los lotes de productos; permite gestionar cadencias, gestionar la carrera de cada colector para adaptarla a las necesidades; permite así optimizar los tiempos de formación de los lotes de productos.
El presente invento propone una máquina que presenta una especie de carácter universal pues permite, en efecto, multiplicar los modos operacionales de captura de productos y ofrece también la posibilidad de capturar productos de formas variadas y, sobre todo, productos cuya estabilidad no es la primera cualidad, debido a su tamaño y/o la posición de su centro de gravedad, por ejemplo.
Esta estabilidad de los productos sobre la máquina puede verse afectada también por varios factores, como las velocidades de desplazamiento y las aceleraciones, pero también por factores que dependen de la naturaleza de los productos... [Seguir leyendo]
Reivindicaciones:
E10808933
1. Máquina de agrupamiento de productos que incluye una cinta (2) transportadora de alimentación, sobre la que los citados productos llegan en línea, cuya máquina comprende unos colectores (4) , en forma de peines, dispuestos transversalmente con respecto al eje longitudinal (xxÂ) de llegada de los productos (1) , cuyos colectores (4) están animados de un movimiento cíclico poligonal para capturar, los unos a continuación de los otros, los citados productos para desplazarlos a continuación sobre una mesa (3) dispuesta lateralmente en donde el lote de productos es recogido con vistas a su encajonamiento, y para, finalmente, volver al punto de partida, caracterizada por que los citados colectores (4) están decalados verticalmente, unidos a unos rieles (8) que están dispuestos transversalmente con respecto al citado eje longitudinal (xxÂ) , cuyos rieles (8) incluyen, cada uno, un carrito (7) móvil que lleva, por medio de un accionador (11) , un colector (4) , cuyos carritos (7) y accionadores (11) están superpuestos y son controlados por medio de un autómata (17) programable para controlar el citado movimiento cíclico poligonal de cada colector (4) .
2. Máquina de agrupamiento según la reivindicación 1, caracterizada por que incluye unos medios de control de la posición de los productos (1) sobre la cinta (2) transportadora de alimentación, cuyos medios están constituidos por un captador (12) unido al autómata (17) , para coordinar los movimientos de los carritos (7) y de sus colectores (4) con la posición de los citados productos, al nivel del puesto (5) de captura.
3. Máquina de agrupamiento según la reivindicación 1, caracterizada por que cada colector (4) es móvil en un plano horizontal medio que pasa por el eje de su accionador (11) .
4. Máquina de agrupamiento según la reivindicación 1, caracterizada por que el autómata (17) de mando de los colectores (4) incluye un interfaz de programación que ofrece la posibilidad de seleccionar un colector o un número de colectores (4) adaptado a los diferentes modos de reagrupamiento y/o a los tipos de productos (1) a reagrupar.
5. Máquina de agrupamiento según la reivindicación 1, caracterizada por que el interfaz de programación ofrece la posibilidad de seleccionar al menos uno, dos, tres o cuatro colectores (4) , o parejas de colectores (4) , o incluso seleccionar un colector (4) y una pareja de colectores (4) .
6. Máquina de agrupamiento según la reivindicación 1, caracterizada por que cada colector (4) está constituido por uno o varios peines que están espaciados y superpuestos, de tal manera que multiplican los contactos con los productos (1) para mejorar su estabilidad durante su transferencia entre la cinta (2) transportadora de alimentación y el puesto (6) de depósito sobre la mesa (3) de recepción.
7. Máquina de agrupamiento según la reivindicación 1, caracterizada por que el colector (4) incluye unos alvéolos cuya profundidad permite acoger uno o varios productos con vistas a su reagrupamiento bajo la forma de un lote.
8. Máquina de agrupamiento según la reivindicación 1, caracterizada por que para el reagrupamiento de productos
(1) cuya sección no es circular, del tipo frascos de sección ovoide, cada colector (4) incluye unos alvéolos (4i) que están dispuestos en oblicuo con respecto al eje longitudinal (xxÂ) de la cinta (2) transportadora de alimentación, formando el eje (20) de los citados alvéolos (4i) un ángulo (a) no nulo con el eje longitudinal (xxÂ) de la cinta (2) transportadora de alimentación, estando comprendido el citado ángulo entre 10 y 45º , por ejemplo.
9. Máquina de agrupamiento según la reivindicación 8, caracterizada por que, en el caso de colectores (4) con alvéolos (4i) oblicuos, los accionadores (11) están orientados en oblicuo, paralelamente al eje (20) de los citados alvéolos para permitir la suelta del lote de productos (1) sin empujarlos.
10. Máquina de agrupamiento según la reivindicación 1, caracterizada por que incluye al menos un robot (13) que se encarga de los productos (1) , estando dotado el citado robot (13) con un cabezal (14) de aprehensión capaz de levantar al menos un lote de productos (1) en el puesto (6) de depósito, con vistas a su encajonado, permitiendo igualmente el citado robot (13) efectuar un reagrupamiento de cada lote depositado por el colector (4) , con vistas a formar un lote global constituido por un número de productos (1) susceptibles de llenar directamente una caja.
11. Máquina de agrupamiento según la reivindicación 1, caracterizada por que incluye una mesa (3) de recepción que está constituida por un plano fijo sobre el que los productos (1) capturados por cada colector (4) toman su lugar a medida de su desplazamiento con el citado colector (4) , cuyo plano fijo incluye, al nivel del puesto (6) de depósito, una instalación del tipo protuberancia o badén , por ejemplo, para retener el lote de productos (1) capturados durante el movimiento de retroceso del citado colector (4) , es decir en el momento de la suelta de los citados productos (1) en el citado puesto (6) de depósito.
12. Máquina de agrupamiento según la reivindicación 1, caracterizada por que, en el caso de un encajonado del lote de productos (1) en una proforma cortada del tipo â??wrap-aroundâ??, la máquina incluye, asociado a un robot (13) u otro, un dispositivo impulsor (14) que permite una simple transferencia transversal del citado lote de productos (1) hacia una cinta transportadora (16) de encajonado sobre la que está instalada la citada proforma cortada y que está situada al borde del puesto (6) de depósito.
Patentes similares o relacionadas:
Dispositivo orientador, del 28 de Abril de 2020, de SANCHEZ PAREDES, Hugo Marino: 1. Dispositivo orientador, para colocar en vertical un objeto con una muesca o abertura (6'), caracterizado porque comprende un soporte : configurado para colocarse […]
Método y dispositivo para agrupar piezas en bruto de productos, del 4 de Diciembre de 2019, de Texa AG: Método para agrupar productos alargados configurados como latas, tubos o cartuchos, preferiblemente, vacíos, en donde los productos se suministran con una instalación […]
Dispositivo de relevo, del 13 de Noviembre de 2019, de TOYO JIDOKI CO., LTD.: Un dispositivo de relevo que comprenda: una primera sección de transporte que transporta una pluralidad de objetos a transportar, continuamente […]
Disco de soporte y sistema transportador, del 5 de Noviembre de 2019, de FLEXLINK COMPONENTS AB: Disco de soporte para un sistema transportador, que comprende un cuerpo inferior no circular que tiene una sección frontal que comprende una forma […]
 Procedimiento y dispositivo para la detección y la separación de artículos, del 31 de Octubre de 2019, de FERAG AG: Procedimiento para la deteccion y la separacion dirigida de articulos individuales que se transportan unos detras de otros sobre un elemento […]
Procedimiento y dispositivo para la detección y la separación de artículos, del 31 de Octubre de 2019, de FERAG AG: Procedimiento para la deteccion y la separacion dirigida de articulos individuales que se transportan unos detras de otros sobre un elemento […]
Dispositivo y procedimiento para transferir recipientes a una máquina procesadora, del 1 de Noviembre de 2017, de Groninger GmbH&Co. KG: Sistema con una máquina procesadora para el tratamiento cíclico de un grupo de recipientes , y un dispositivo para transferir recipientes a […]
Dispositivo y procedimiento para descargar porciones de embutido, del 3 de Mayo de 2017, de ALBERT HANDTMANN MASCHINENFABRIK GMBH & CO. KG: Dispositivo para descargar porciones de embutido con un primer equipo de transporte para transportar las porciones de embutido en […]
Dispositivo de identificación y acumulación de artículos, del 2 de Noviembre de 2016, de Lusia Soluzioni Meccaniche S.r.l: Un dispositivo de identificación y acumulación de artículos (A) provistos de un código de identificación, que comprende: un bastidor ; […]