Manipulador para el mantenimiento en particular de cuerpos sustancialmente paralelepipédicos o cilíndricos en un sistema de almacenamiento automatizado.
Manipulador (10) para el mantenimiento en particular de cuerpos sustancialmente paralelepipédicos o cilíndricosen un sistema de almacenamiento automatizado (11),
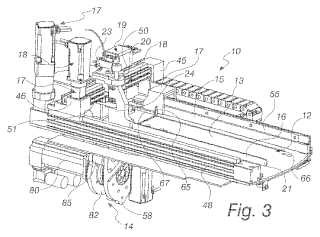
del tipo que comprenden un dispositivo de agarre (12), queestá previamente dispuesto sobre una placa (13) para soportar cuerpos paralelepipédicos o cilíndricos que hay quetransportar, dicha placa (13) estando a su vez soportada por un conjunto (14) para mover dicho manipulador (10),dicho dispositivo de agarre (12) comprendiendo dos hojas mutuamente opuestas (15, 16), unos primeros medios(17) de movimiento de translación de dichas hojas en una primera dirección (X) identificada como la dirección haciauna cinta transportadora o una estantería de almacenamiento dispuesta enfrente, y unos segundos medios (18) demovimiento de translación en una segunda dirección (Y) identificada como la dirección en ángulo recto con respectoa dicha primera dirección (X) de acercamiento mutuo de las hojas (15, 16) para el agarre de uno o más cuerposparalelepipédicos o cilíndricos, y de distanciamiento mutuo para la liberación de dichos cuerpos paralelepipédicos ocilíndricos una vez que han sido cargados o descargados desde la placa de soporte (13), estando dicho manipulador(10) caracterizado por el hecho de que dicho dispositivo de agarre (12) tiene - una primera hoja de agarre deelevada rigidez (15), que realiza un movimiento de translación solamente en la primera dirección (X) mediante losprimeros medios de movimiento de translación (17),
- una segunda hoja de agarre (16), que también tiene una elevada rigidez, es más delgada que la primera hoja, y sepuede mover en translación tanto en la primera dirección (X) junto con dicha primera hoja (15), con dichos primerosmedios de movimiento de translación (17), y en la segunda dirección (Y) hacia o alejándose de dicha primera hoja(15), por dichos segundos medios de movimiento de translación (18), dicha segunda hoja (16) siendo capaz de girar,con medios de rotación (19), sobre un pivote (20) de esta con un eje que es sustancialmente perpendicular al planodefinido por dicha primera dirección (X) y dicha segunda dirección (Y), dichos medios de rotación (19) estandosoportados por los segundos medios de movimiento de translación (18) a lo largo de dicha segunda dirección (Y).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12167614.
Solicitante: Label Elettronica S.R.L.
Nacionalidad solicitante: Italia.
Dirección: Viale della Repubblica, 18 35010 Limena (PD) ITALIA.
Inventor/es: RAMI,ENRICO, RAMI,MARGHERITA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G1/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › mecánicos.
PDF original: ES-2445568_T3.pdf
Fragmento de la descripción:
Manipulador para el mantenimiento en particular de cuerpos sustancialmente paralelepipédicos o cilíndricos en un sistema de almacenamiento automatizado [0001] La presente invención se refiere a un manipulador para el mantenimiento en particular de cuerpos sustancialmente paralelepipédicos o cilíndricos en un sistema de almacenamiento automatizado, según el preámbulo de la reivindicación 1. Este manipulador se describe en EP-A-2163507.
En particular, la invención está destinada para su uso en un sistema de almacenamiento automatizado para la gestión de los suministros de paquetes de medicamentos y similares.
En la actualidad se conoce el uso de sistemas de almacenamiento robotizados para el manejo de paquetes de medicamentos en las farmacias o en los hospitales.
Estos comprenden estanterías con canales inclinados a fin de proporcionar una rampa con respecto al plano horizontal, en el que los paquetes de medicamentos son almacenados por un manipulador.
Los paquetes indicados por el operador son expulsados automáticamente a demanda desde este tipo de 20 canales.
Con el fin de llenar los canales inclinados, el manipulador toma los paquetes de una cinta transportadora o de los estantes de almacenamiento, conocidos como estantes de productos de baja rotación, y los coloca en los canales de la estantería o los deja caer en el conducto adaptado para la retirada directa por el operador.
Los estantes de almacenamiento de baja rotación pueden actuar como una unidad de almacenamiento para el reabastecimiento de los canales inclinados, que se conocen comúnmente como estantes de alta rotación, ya que en estos se pueden almacenar los productos que se utilizan con menos frecuencia que aquellos dispuestos en los canales inclinados.
El manipulador se mueve mediante un movimiento de traslación que lo posiciona en la cinta transportadora, los estantes de almacenamiento o los canales inclinados.
Se conocen a día de hoy manipuladores que giran con respecto a un eje vertical con el fin de ser orientados y
re-orientados de manera que queden enfrentados alternativamente con los estantes de almacenamiento o la cinta transportadora, de la que puede agarrar los paquetes, o hacia los canales en los cuales dejar caer los paquetes agarrados.
Una necesidad que se siente particularmente hoy en día en el campo de los sistemas de almacenamiento 40 robotizados es la de asegurar una retención eficaz, o agarre, de los paquetes para su manejo por el manipulador.
Hoy en día, con el fin de agarrar los paquetes, el manipulador se proporciona preferiblemente con un dispositivo de agarre similar.
Este dispositivo de agarre se dispone generalmente previamente dispuesto en una placa de soporte para los paquetes que hay que transportar, y a su vez la placa está soportada por un conjunto para mover el manipulador en su totalidad.
El dispositivo de agarre comprende dos hojas mutuamente opuestas, es decir dos barras planas dispuestas 50 sustancialmente en ángulo recto con respecto a la disposición de la placa de soporte, unos primeros medios de movimiento de translación para estas hojas, en una primera dirección X identificada como la dirección hacia una cinta transportadora o una estantería de almacenamiento dispuesta enfrente, y unos segundos medios de movimiento de translación para estas hojas, en una segunda dirección Y identificada como la dirección en ángulo recto con respecto a X de acercamiento mutuo de las hojas para el agarre de uno o más paquetes, y de 55 distanciamiento mutuo para la liberación de los paquetes una vez que han sido cargados o descargados desde la placa de soporte.
Las hojas son lo suficientemente largas como para ser insertadas entre dos filas de paquetes en una estantería a una profundidad que corresponde a la profundidad de dicha estantería, en general, unas pocas docenas 60 de centímetros, para el agarre del paquete dispuesto en la estantería que está más alejada de la placa de soporte.
Dos filas vecinas de paquetes están dispuestas lado a lado de modo que entre ellos existe un espacio cuya anchura es de menos de dos centímetros, para el paso de las hojas de agarre, y el agarre de estas en el paquete o en la pluralidad de paquetes a agarrar.
Este espacio de aproximadamente dos centímetros entre dos filas de paquetes adyacentes determina una importante reducción en general del espacio de almacenamiento eficaz en la estantería, que está diseñada para soportar muchas filas de paquetes, y esta reducción se debe precisamente a que deben existir dichos espacios entre dos filas consecutivas de paquetes.
Sin embargo, estos dos centímetros son el resultado de las limitaciones de los manipuladores convencionales.
De hecho, los manipuladores más recientes están equipados con hojas que se proporcionan con medios que permiten una rotación mutua controlada y contenida, con el fin de proporcionar un mejor agarre en el paquete a agarrar. Esta rotación, precisamente a causa de la falta de un espacio adecuado entre dos filas de paquetes en una estantería, se lleva a cabo generalmente antes de que las hojas se muevan en traslación en la dirección X para disponerse en los espacios entre dos filas de paquetes, y una vez las colocadas en los lados de la fila de paquetes, se mueven e translación a lo largo de la dirección Y a fin de agarrar el paquete o paquetes.
Estas hojas, que tienen pocas decenas de centímetros de longitud, ya que no deben flexionarse para soportar suficientemente los cuerpos a agarrar, tienen un espesor medio de aproximadamente seis milímetros. La convergencia impuesta a las hojas por la rotación mutua antes de la inserción en los espacios de agarre entre dos filas de paquetes, aunque ligera, es lo que determina los mencionadas aproximadamente dos centímetros de espacio necesario entre filas de paquetes adyacentes.
El objetivo de la presente invención es proporcionar un manipulador para el mantenimiento en particular de cuerpos sustancialmente paralelepipédicos o cilíndricos en un sistema de almacenamiento automatizado, que sea capaz de superar los inconvenientes de manipuladores convencionales mencionados más arriba.
Con este objetivo, un objeto de la invención es proporcionar un manipulador que hace que sea posible disponer los paquetes en almacenamiento a fin de optimizar los espacios disponibles en las estanterías.
Otro objeto de la invención es proporcionar un manipulador que sea capaz de realizar agarres simples o múltiples a la manera de los manipuladores convencionales.
Otro objeto de la invención es proporcionar un manipulador que no tenga menos eficiencia y versatilidad que los manipuladores convencionales.
Otro objeto de la invención es proporcionar un manipulador para el mantenimiento en particular de cuerpos sustancialmente paralelepipédicos o cilíndricos en un sistema de almacenamiento automatizado que es estructuralmente simple y fácil de usar, y que puede ser producido utilizando sistemas y tecnologías conocidos.
Este objetivo y estos y otros objetos que resultarán más aparentes a continuación se consiguen con un manipulador para el mantenimiento en particular de cuerpos sustancialmente paralelepipédicos o cilíndricos en un sistema de almacenamiento automatizado, del tipo que comprenden un dispositivo de agarre, que está previamente dispuesto sobre una placa para soportar cuerpos paralelepipédicos o cilíndricos que hay que transportar, dicha placa estando a su vez soportada por un conjunto para mover dicho manipulador, comprendiendo dicho dispositivo de agarre dos hojas mutuamente opuestas, unos primeros medios de movimiento de translación de dichas hojas en una primera dirección identificada como la dirección hacia una cinta transportadora o una estantería de almacenamiento dispuesta enfrente, y unos segundos medios de movimiento de translación en una segunda dirección identificada como la dirección en ángulo recto con respecto a dicha primera dirección, de acercamiento mutuo de las hojas para el agarre de uno o más cuerpos paralelepipédicos o cilíndricos, y de distanciamiento mutuo para la liberación de dichos cuerpos paralelepipédicos o cilíndricos una vez que han sido cargados o descargados desde la placa de soporte, estando dicho manipulador caracterizado por el hecho de que dicho dispositivo de agarre tiene
- una primera hoja de agarre de elevada rigidez, que realiza un movimiento de translación solamente en la primera dirección mediante los primeros medios de movimiento de translación,
- una segunda hoja de agarre, que también es de elevada rigidez, es más delgada que la primera hoja, y se puede mover en translación tanto en la primera dirección junto... [Seguir leyendo]
Reivindicaciones:
1. Manipulador (10) para el mantenimiento en particular de cuerpos sustancialmente paralelepipédicos o cilíndricos en un sistema de almacenamiento automatizado (11) , del tipo que comprenden un dispositivo de agarre (12) , que está previamente dispuesto sobre una placa (13) para soportar cuerpos paralelepipédicos o cilíndricos que hay que transportar, dicha placa (13) estando a su vez soportada por un conjunto (14) para mover dicho manipulador (10) , dicho dispositivo de agarre (12) comprendiendo dos hojas mutuamente opuestas (15, 16) , unos primeros medios
(17) de movimiento de translación de dichas hojas en una primera dirección (X) identificada como la dirección hacia una cinta transportadora o una estantería de almacenamiento dispuesta enfrente, y unos segundos medios (18) de movimiento de translación en una segunda dirección (Y) identificada como la dirección en ángulo recto con respecto a dicha primera dirección (X) de acercamiento mutuo de las hojas (15, 16) para el agarre de uno o más cuerpos paralelepipédicos o cilíndricos, y de distanciamiento mutuo para la liberación de dichos cuerpos paralelepipédicos o cilíndricos una vez que han sido cargados o descargados desde la placa de soporte (13) , estando dicho manipulador
(10) caracterizado por el hecho de que dicho dispositivo de agarre (12) tiene -una primera hoja de agarre de elevada rigidez (15) , que realiza un movimiento de translación solamente en la primera dirección (X) mediante los primeros medios de movimiento de translación (17) ,
- una segunda hoja de agarre (16) , que también tiene una elevada rigidez, es más delgada que la primera hoja, y se puede mover en translación tanto en la primera dirección (X) junto con dicha primera hoja (15) , con dichos primeros medios de movimiento de translación (17) , y en la segunda dirección (Y) hacia o alejándose de dicha primera hoja (15) , por dichos segundos medios de movimiento de translación (18) , dicha segunda hoja (16) siendo capaz de girar, con medios de rotación (19) , sobre un pivote (20) de esta con un eje que es sustancialmente perpendicular al plano definido por dicha primera dirección (X) y dicha segunda dirección (Y) , dichos medios de rotación (19) estando soportados por los segundos medios de movimiento de translación (18) a lo largo de dicha segunda dirección (Y) .
2. El manipulador según la reivindicación 1, caracterizado por el hecho de que dicha segunda hoja (16) está hecha de un material con alta resistencia a la flexión, y tiene aproximadamente la mitad del espesor de dicha primera hoja (15) .
3. El manipulador según la reivindicación 2, caracterizado por el hecho de que dicha segunda hoja (16) , en una porción del extremo libre (16) de esta, tiene una zona de agarre (22) con agarre incrementado.
4. El manipulador según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que los medios de rotación (19) están constituidos por una barra de maniobra (23) que está alargada radialmente desde dicho pivote (20) , la segunda hoja (16) estando fijada a dicho pivote (20) en voladizo y con interposición de un gancho de soporte (24) , la barra de maniobra (23) siendo girada por medios de actuación lineal correspondientes.
5. El manipulador según la reivindicación 4, caracterizado por el hecho de que dichos medios de actuación lineal están constituidos por medios de empuje (25) , que están eléctricamente motorizados y están adaptados para actuar sobre dicha barra de maniobra (23) con la finalidad de hacer girar dicha segunda hoja (16) , proporcionándose unos medios de empuje antagonistas para el retorno de dicha barra de maniobra (23) a la posición en la que la segunda hoja (16) es paralela a la primera hoja (15) .
6. El manipulador según la reivindicación 5, caracterizado por el hecho de que dichos medios de empuje (25) comprenden una barra de empuje roscada (26) , con una cabeza hemisférica (27) , que está concebida para moverse en traslación por un elemento de rotor roscado hembra (28) , que está roscado internamente de manera complementaria al roscado de dicha barra de empuje (26) y se hace girar por un motor eléctrico asociado (29) , estando asociados unos medios que impiden la rotación con dicha barra de empuje (26) con la finalidad de impedir su rotación sobre su propio eje longitudinal.
7. El manipulador según la reivindicación 6, caracterizado por el hecho de que dichos medios que impiden la rotación de la barra de empuje (26) están constituidos - pro una porción aplanada (30) de dicha barra de empuje (26) que es cercana a la cabeza hemisférica (27) y está adaptada para deslizarse sobre una superficie que impide la rotación correspondiente provista en una cara plana (31) de una placa (32) que está fijada a una primera brida (33) que soporta a dicho motor eléctrico asociado (29) ,
- y, en el extremo opuesto de la barra de empuje (26) , por al menos un saliente radial (34) que pasa a través de dicha barra de empuje (26) y está dispuesto para realizar un movimiento de translación en una ranura de guiado correspondiente (36) definida en una segunda brida (37) , que está fijada al cuerpo del motor eléctrico asociado (29) en el lado opuesto con respecto a dicha primera brida (33) .
8. El manipulador según una o más de las reivindicaciones 5-7, caracterizado por el hecho de que dichos medios de empuje antagonistas para el retorno de dicha barra de maniobra (23) a la posición en la que la segunda hoja (16) es paralela a la primera hoja (15) están constituidos por un muelle de tracción (38) , que está interpuesto entre dicha primera brida (33) y dicha barra de maniobra (23) .
9. El manipulador según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que unos medios (39) para indicar que la disposición mutuamente paralela de dicha primera hoja (15) y dicha segunda hoja
(16) se ha restablecido están asociados con dicha barra de maniobra (23) .
10. El manipulador según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que dichos primeros medios de movimiento de translación (17) para dichas hojas (15, 16) en dicha primera dirección (X) están constituidos por dos correderas laterales mutuamente opuestas (45, 46) , que están unidas por un elemento transversal y están adaptadas para realizar un movimiento de translación sobre unas guías laterales correspondientes (47, 48) que corren en paralelo en dos lados opuestos de la placa (13) , estando unos medios para el movimiento en dicha primera dirección (X) asociados con una de dichas guías laterales (48) , estando dichos segundos medios de movimiento de translación (18) definidos por una tercera corredera (50) , sobre la que dicha segunda hoja (16) está montada con los medios de rotación respectivos (19) , estando dicha tercera corredera (50) dispuesta para realizar un movimiento de translación sobre una tercera guía correspondiente adicional (51) , que es transversal a las dos primeras guías (47, 48) y define a dicho elemento transversal para que una a dichas dos primeras guías, estando unos medios correspondientes para el movimiento en la segunda dirección (Y) sobre dicha tercera guía (51) asociados con dicha tercera corredera (50) .
Patentes similares o relacionadas:
Sistema de vías con nodos de intercomunicación dispuestos en la vertical y los vehículos con doble sistema de sustentación que discurren por ellas, del 27 de Julio de 2020, de RUIZ DE LARA REDONDO, José Antonio: Sistema de vías con nodos de intercomunicación dispuestos en la vertical y los vehículos con doble sistema de sustentación que discurren por ellas, capaces de trasladarse […]
Sistema de almacenamiento en estantería con realimentación de energía, del 1 de Julio de 2020, de KNAPP LOGISTIK AUTOMATION GMBH: Sistema de almacenamiento en estantería con al menos dos unidades de estantería (1a-1d), presentando cada unidad de estantería un dispositivo […]
Sistema de preparación para la expedición con un robot de transporte para pasar por debajo de estanterías individuales y carros de transporte, del 13 de Mayo de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos almacenados en un almacén con estanterías en bolsas de transporte con […]
Dispositivo para transferencia de artículos e instalación para transporte de artículos, del 6 de Mayo de 2020, de DAIFUKU CO., LTD.: Dispositivo para transferencia de artículos (2B, 2C) configurado para desplazar un artículo (W) a lo largo de una dirección de transferencia (Y) […]
Procedimiento de recogida de objetos con robots lanzadera, del 22 de Abril de 2020, de SOLYSTIC: Procedimiento de procesamiento de objetos en un centro logístico que comprende una zona de almacenaje de los objetos dividida en segmentos de almacenaje adyacentes […]
Dispositivo lanzadera de almacén, y sistemas y métodos que lo incorporan, del 4 de Marzo de 2020, de Majied, Fadi Mohammad Majed Hussain Abdel: Sistema para desplazar palés que comprende: una rejilla rectangular que comprende carriles laterales orientados a lo largo de un eje x y carriles ortogonales […]
Procedimiento y dispositivo para el almacenamiento y recuperación o reubicación de contenedores en almacenes de gran altura, del 4 de Marzo de 2020, de AMOVA GmbH: Procedimiento para almacenar y recuperar o reubicar contenedores en almacenes de gran altura de una instalación de transbordo, […]
Sistema de preparación para la expedición de artículos para la preparación de pedidos y de lotes, del 19 de Febrero de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos desde contenedores de almacenamiento en contenedores […]