MANGO ACTIVO DE FUERZA CONTRARIA PARA EL USO EN INSTRUMENTOS BIDIRECCIONALES DE PUNTA DESVIABLE.
Un ensamblaje de mango para el uso en un instrumento (10) que tiene una dirección bidireccional de un árbol desviable (60),
en el que tras desviarse de una condición no desviada en una primera dirección, el árbol (60) genera una fuerza de retroceso en una segunda dirección opuesta, y tras lo que el árbol (60), que está desviado de la condición no desviada en la segunda dirección, genera una fuerza de retroceso en la primera dirección opuesta, comprendiendo el ensamblaje:
un mecanismo de control (40) que se puede colocar manualmente, acoplado al árbol (60) para desviar selectivamente el árbol en la primera y segunda direcciones, y caracterizado por que
el ensamblaje comprende además un mecanismo de fuerza contraria (50, 200, 300) acoplado funcionalmente al mecanismo de control (40) y dispuesto para reducir activamente una fuerza de deflexión necesaria para colocar manualmente el mecanismo de control (40) para desviar el árbol (60) de la condición no desviada en una o ambas de la primera y segunda direcciones
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US01/30090.
Solicitante: C.R. BARD, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 730 CENTRAL AVENUE,MURRAY HILL NEW JERSEY 0797.
Inventor/es: DUBOIS, TOM, EBERHARDT,MARK, MADIA,FRANK.
Fecha de Publicación: .
Fecha Concesión Europea: 5 de Mayo de 2010.
Clasificación Internacional de Patentes:
- A61M25/01C10
Clasificación PCT:
- A61M25/01 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61M DISPOSITIVOS PARA INTRODUCIR AGENTES EN EL CUERPO O PARA DEPOSITARLOS SOBRE EL MISMO (introducción de remedios en o sobre el cuerpo de animales A61D 7/00; medios para la inserción de tampones A61F 13/26; dispositivos para la administración vía oral de alimentos o medicinas A61J; recipientes para la recogida, almacenamiento o administración de sangre o de fluidos médicos A61J 1/05 ); DISPOSITIVOS PARA HACER CIRCULAR LOS AGENTES POR EL CUERPO O PARA SU EXTRACCION (cirugía A61B; aspectos químicos de los artículos quirúrgicos A61L; magnetoterapia utilizando elementos magnéticos colocados dentro del cuerpo A61N 2/10 ); DISPOSITIVOS PARA INDUCIR UN ESTADO DE SUEÑO O LETARGIA O PARA PONERLE FIN. › A61M 25/00 Catéteres; Sondas huecas (para medida o examen A61B). › Introducción, guía, avance, colocación o mantenimiento en posición de catéteres (A61M 25/10 tiene prioridad).
Clasificación antigua:
- A61B17/00 A61 […] › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00).
Fragmento de la descripción:
Mango activo de fuerza contraria para el uso en instrumentos bidireccionales de punta desviable.
Campo de la invención
Esta invención se refiere al campo de instrumentos de punta desviable y, más particularmente, a un ensamblaje de mango para el uso en un instrumento que tiene una dirección bidireccional de un árbol desviable. Esto se puede manifestar como un mango activo de fuerza contraria para el uso en instrumentos de punta de deflexión para contrarrestar una fuerza de retroceso al centro generada por un árbol del instrumento tras estar desviado.
Antecedentes de la invención
Los procedimientos quirúrgicos modernos a menudo necesitan diagnósticos localizados o tratamientos aplicados a áreas interiores del cuerpo relativamente inaccesibles. En el pasado, tales procedimientos implicaron típicamente la cirugía invasiva, permitiendo al médico que identifique visualmente o trate el área de interés, accediendo a una abertura o incisión relativamente grande hecha en el cuerpo. Desafortunadamente, los métodos quirúrgicos invasivos a menudo incluyen efectos secundarios indeseables, por el traumatismo del tejido asociado con el procedimiento. A menudo, los efectos del traumatismo alargan el periodo de curación y rehabilitación para el paciente.
Para minimizar el traumatismo a menudo asociado con la cirugía invasiva, los expertos en la materia han desarrollado instrumentos quirúrgicos relativamente pequeños, tales como catéteres, para la inserción en la vasculatura del cuerpo. Típicamente, el instrumento quirúrgico particular accede al cuerpo a través de una pequeña incisión hecha cerca de la piel, donde se puede hacer avanzar después a un área de interés. Sin embargo, para navegar a través de la vasculatura de una manera previsible, el instrumento tiene que ser controlable de forma precisa para situar, como ejemplos, electrodos de ablación o sondas de formación de imágenes cerca de tejidos específicos de interés.
Para posibilitar la manipulación del instrumento, tal como un catéter, en el interior del cuerpo, se pueden usar diversos mecanismos para "dirigir" selectivamente la punta distal del catéter mientras que el operario inserta el dispositivo en el cuerpo. Un mecanismo de este tipo es un mecanismo de alambre de control deslizable que incluye un par de alambres de control que abarcan la longitud del árbol, o cuerpo, del catéter. Los alambres de control tienen respectivos extremos distales anclados en ubicaciones específicas en la punta distal del cuerpo del catéter, de forma correspondiente a un movimiento de flexión predeterminado. Los extremos proximales de los alambres están montados a un mecanismo de patín que responde al operario colocando uno de los alambres en tensión, tirando del extremo del catéter para la deflexión en una primera dirección, mientras que se comprime, o pandea, simultáneamente, el otro alambre. Un ejemplo de una configuración de catéter de este tipo que incorpora un mecanismo de control de este tipo se encuentra en la Patente de Estados Unidos Nº 5.383.852, asignada al presente cesionario/propietario.
Típicamente, el instrumento quirúrgico incluye un componente del mango. Los mangos para instrumentos de punta desviable típicamente dependen de que el usuario genere la fuerza necesaria para desviar el miembro de punta en ambas direcciones, para mantener la deflexión y para hacer retroceder el miembro de punta al centro después de la deflexión. Los dispositivos que consiguen lo anterior, a menudo, se dice que tienen una dirección bidireccional. A veces, el miembro de punta se desvía solamente en una dirección y se depende del mismo para generar la fuerza necesaria para hacer retroceder el miembro de punta al centro. Estos dispositivos, se dice que tienen una dirección unidireccional. En todos estos diseños convencionales de mango, el mango es un componente pasivo. El mango no genera ninguna fuerza, solamente suministra la fuerza aplicada por el usuario.
Cuando el extremo distal del cuerpo del instrumento, por ejemplo, el cuerpo del catéter, se desvía, se genera una fuerza que tiende a conducir el extremo distal de nuevo a su posición enderezada. A esto se refiere habitualmente con fuerza de "retroceso al centro". Habitualmente, esto no es un efecto deseado, ya que, durante el uso, a menudo es cómodo para el usuario si, una vez que el cuerpo del catéter está desviado, se mantiene de tal manera sin la introducción continua de fuerza por el usuario para contrarrestar la fuerza de retroceso al centro que procede del cuerpo del catéter. Los diseños existentes de instrumentos pasivos tenían que depender de rozamiento, trinquetes u otros mecanismos de "arrastre" para producir este efecto de contrarresto. Por ejemplo, un mecanismo de contrarresto de este tipo usa un tornillo de ajuste incluido en el interior del mango para sujetar el cuerpo del catéter en diversas ubicaciones para evitar que el extremo distal del cuerpo del catéter se enderece cuando el médico libera el mango. El tornillo de ajuste generalmente aplica una fuerza de rozamiento a los componentes operativos del mango. La fuerza de rozamiento aplicada a los componentes del mango, por supuesto, tiene que ser superior a la fuerza máxima generada por el extremo distal del cuerpo del catéter. La fuerza máxima se genera cuando el extremo distal está en su orientación más curvada. Una de las desventajas asociadas de tales mecanismos de contrarresto es que, para conseguir el arrastre necesario para mantener la conformación del cuerpo del catéter, la fuerza necesaria para desviar el extremo distal puede ser inconveniente para el usuario. En otras palabras, puede ser difícil para muchos usuarios usar convenientemente un pulgar o dedo para manipular el mango para provocar la deflexión del extremo distal, debido a que la fuerza necesaria para hacer esto es demasiado grande.
La Patente de Estados Unidos Nº 6.013.052 (052) de Durham et al. describe un mango del catéter que tiene un dispositivo de accionador del tipo de pistón junto con un elemento de desviación que desvía el pistón en la dirección distal. El dispositivo descrito en la Patente 052 es del tipo que tiene una dirección unidireccional. Una de las desventajas asociadas con este tipo de mecanismo de desviación es que el mecanismo está diseñado solamente para el uso con dispositivos de dirección unidireccional. En otras palabras, el mecanismo de desviación contrarresta solamente una dirección un movimiento de la punta desviable. Ya que los procedimientos se hacen más complejos y para permitir más libertad en la ejecución de los procedimientos, es más deseable usar dispositivos bidireccionales en comparación con dispositivos unidireccionales. Un experto en la materia apreciará que es significativamente más difícil proporcionar un mecanismo activo de fuerza contraria para un dispositivo que tiene una dirección bidireccional. Una razón es que hay un espacio limitado en la cubierta para colocar un mecanismo que pueda convertir un movimiento bidireccional en una dirección sobre el mecanismo de control de la punta desviable.
Por lo tanto, los expertos en la materia han reconocido la necesidad de un mecanismo bidireccional para contrarrestar la fuerza de retroceso al centro generada por el extremo distal desviado, de tal manera que el cuerpo del catéter permanece en un estado desviado sin la introducción continua de fuerza por el usuario mientras que, al mismo tiempo, la fuerza necesaria para desviar inicialmente el extremo distal es razonable.
La Patente de Estados Unidos Nº 5.944.690 de Falwell et al. describe un mecanismo de control deslizable para un catéter dirigible para manipular un par de alambres de control del catéter. El mecanismo de control comprende un mecanismo de patín acoplado a extremos proximales de los alambres de control y desplazable a lo largo de un trayecto lineal. Los muelles 68, 70 conectan cada alambre al patín para posibilitar a un alambre que se coloque en tensión sin que se coloque el otro alambre en compresión.
Sumario de la invención
De acuerdo con la presente invención, se proporciona un ensamblaje de mango para el uso de un instrumento que tiene una dirección bidireccional de un árbol desviable, en el que, tras estar desviado de una condición no desviada en una primera dirección, el árbol genera una fuerza de retroceso en una segunda dirección opuesta, y tras lo cual el árbol que está desviado de la condición no desviada en la segunda dirección genera una fuerza de retroceso en la primera dirección opuesta, comprendiendo el ensamblaje: un mecanismo de control que se puede colocar manualmente, acoplado al árbol para desviar selectivamente...
Reivindicaciones:
1. Un ensamblaje de mango para el uso en un instrumento (10) que tiene una dirección bidireccional de un árbol desviable (60), en el que tras desviarse de una condición no desviada en una primera dirección, el árbol (60) genera una fuerza de retroceso en una segunda dirección opuesta, y tras lo que el árbol (60), que está desviado de la condición no desviada en la segunda dirección, genera una fuerza de retroceso en la primera dirección opuesta, comprendiendo el ensamblaje:
un mecanismo de control (40) que se puede colocar manualmente, acoplado al árbol (60) para desviar selectivamente el árbol en la primera y segunda direcciones, y caracterizado por que
el ensamblaje comprende además un mecanismo de fuerza contraria (50, 200, 300) acoplado funcionalmente al mecanismo de control (40) y dispuesto para reducir activamente una fuerza de deflexión necesaria para colocar manualmente el mecanismo de control (40) para desviar el árbol (60) de la condición no desviada en una o ambas de la primera y segunda direcciones.
2. El ensamblaje de mango de la reivindicación 1, en el que:
el mecanismo de control (40) incluye un patín (42) que se puede desplazar a lo largo de un trayecto lineal (26) para provocar la deflexión del árbol (60) en la primera y segunda direcciones; y
el mecanismo de fuerza contraria (50, 200, 300) incluye un elemento de desviación (150, 240, 340) para desviar el contrarresto del patín a la fuerza de retroceso una vez que el patín (42) se mueve desde una posición neutra en la que el árbol (60) está en una condición no desviada, proporcionando el elemento de desviación (150, 240, 320) una fuerza de desviación variable al patín (42) para contrarrestar la fuerza de retroceso variable generada cuando el árbol (60) se desvía debido al movimiento del patín (42) de la posición neutra.
3. El ensamblaje de mango de la reivindicación 2, en el que los mecanismos de control (40) y fuerza contraria (50) se disponen en el interior de una cubierta (23) que tiene un extremo distal (22) con un árbol desviable (60) que se extiende hacia el exterior de la misma y un extremo proximal opuesto (24), estando conectado el elemento de desviación (150) al extremo proximal (24) de la cubierta (23).
4. El ensamblaje de mango de la reivindicación 2 ó 3, en el que el mecanismo de control (40) incluye además un par de alambres de control (70, 80) que tienen partes distales ancladas respectivamente a un extremo distal (62) del árbol desviable (60) correspondientes a deflexiones direccionales predeterminadas del instrumento, extendiéndose los alambres de control de forma longitudinal a través del instrumento (10) y teniendo respectivos extremos proximales, estando acoplado funcionalmente el patín (42) a los alambres de control (70, 80) de manera que un desplazamiento lineal del patín (42) desde la posición neutra coloca uno de los alambres de control (70, 80) en tensión para desviar el extremo distal del árbol (62).
5. El ensamblaje de mango de la reivindicación 4, en el que el mecanismo de control (40) incluye una polea (92) para sostener de forma rotatoria uno de los alambres de control (70).
6. El ensamblaje de mango de una cualquiera de las reivindicaciones 2 a 5, en el que la fuerza de desviación sobre el patín (42) es sustancialmente igual a la fuerza de retroceso sobre el patín (42), de manera que las fuerzas se compensan efectivamente entre sí y permiten a un usuario que desvíe progresivamente el extremo distal del árbol (62).
7. El ensamblaje de mango de una cualquiera de las reivindicaciones 2 a 6, en que el mecanismo de fuerza contraria (40) incluye además:
una palanca de leva acodada rotatoria (130) dispuesta en el interior de la cubierta (23) y acoplado funcionalmente al elemento de desviación (150) y el patín (42), de manera que el desplazamiento lineal del patín (42) desde la posición neutra provoca a la palanca de leva acodada que rote en una dirección seleccionada correspondiente, aplicándose la fuerza de desviación a la palanca de leva acodada (130) para desviar la rotación de la palanca de leva acodada (130) en la dirección seleccionada como respuesta al desplazamiento lineal del patín (42).
8. El ensamblaje de mango de la reivindicación 7, en el que la palanca de leva acodada (130) está conectada sobre un pivote (140) a la cubierta (23) para permitir la rotación entre las mismas.
9. El ensamblaje de mango de la reivindicación 7 u 8, en el que la palanca de leva acodada (130) está acoplada funcionalmente al patín (42) por una barra transversal (100), una barra de levas (110), un brazo de enlace (120), estando conectada la barra transversal (100) en su extremo distal 102 al patín (42) y conectada sobre un pivote en su extremo proximal (104) a un primer extremo (112) de la barra de levas (110), estando conectada sobre un pivote la barra de levas (110) a la cubierta (23) en un segundo extremo (114) de la misma, estando conectado el brazo de enlace (120) sobre un pivote en su extremo distal (122) a la barra de levas (110) y conectado sobre un pivote en su extremo proximal (124) a la palanca de leva acodada (130).
10. El ensamblaje de mango de la reivindicación 9, en el que dicho desplazamiento lineal del patín 42 provoca a la barra de levas (110) y el brazo de enlace (120) que pivoten, lo que produce una rotación de la palanca de leva acodada (130) en la dirección seleccionada, aplicándose la fuerza de desviación de la palanca de leva acodada (130) al patín (42) a través de la barra transversal (100), la barra de levas (110) y el brazo de enlace (120).
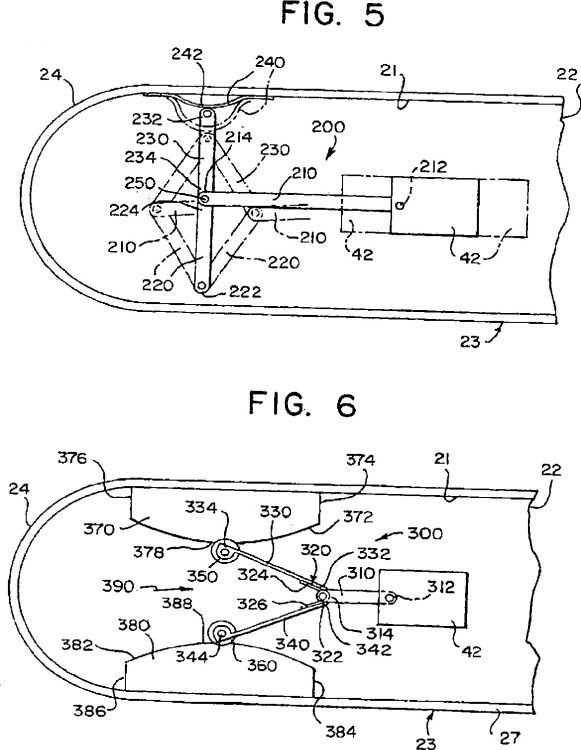
11. El ensamblaje de mango de la reivindicación 2, en el que el mecanismo de fuerza contraria (220) incluye:
una barra transversal (210) conectada en su extremo distal (212) al patín (42) y que se extiende longitudinalmente en el interior de la cubierta (23);
una primera (220) y segunda (230) barras transversales sobre un pivote, teniendo la primera barra transversal (220) un primer extremo (222) conectado sobre un pivote a la cubierta (23) y un segundo extremo (224) conectado sobre un pivote a un extremo proximal (214) de la barra transversal (210), teniendo la segunda barra transversal (230) un primer extremo (232) conectado al elemento de desviación (240) y un segundo extremo (234) conectado sobre un pivote al extremo proximal (214) de la barra transversal (210), sirviendo el desplazamiento lineal del patín (42) para flexionar sobre un pivote la disposición de la primera y segunda barras transversales (220, 230), y actuando de este modo la fuerza de desviación sobre la segunda barra transversal (230) para ayudar en el desplazamiento lineal del patín (42).
12. El ensamblaje de mango de la reivindicación 11, en el que el elemento de desviación (240) comprende un muelle de ballesta (244, 246).
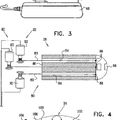
13. Un ensamblaje de mango de acuerdo con la reivindicación 2, en el que:
el mecanismo de fuerza contraria incluye un primer (350) y segundo (360) miembros de rodillo conectados funcionalmente al elemento de desviación (320) que, a su vez, está conectado funcionalmente al patín (42), disponiéndose el primer miembro de rodillo (350) sobre una superficie (372) del primer miembro de carril (370) y disponiéndose el segundo miembro de rodillo (360) sobre una superficie (382) de un segundo miembro de carril (380) separado del primer miembro de carril (370), actuando el elemento de desviación (320) para desviar entre sí el primer (350) y segundo (360) rodillos cuando los rodillos se desplazan a lo largo de las superficies (372, 382) del primer y segundo miembros de carril, desviándose de este modo el patín (42) para contrarrestar la fuerza de retroceso.
14. El ensamblaje de mango de la reivindicación 13, en el que cada superficie (372, 382) del primer y segundo miembros de carril (370, 380) tiene una conformación convexa, estando separados entre sí el primer y segundo miembros de carril (370, 380) al contrario del modo en que se disponen el primer y segundo rodillos (350, 360) entre los mismos.
15. El ensamblaje de mango de la reivindicación 13, en el que la distancia entre las superficies (372, 382) del primer y segundo miembros de carril (370, 380) aumenta hacia los bordes (374, 384, 376, 386) del primer y segundo miembros de carril (370, 380), de manera que, cuando el patín (42) está desplazado linealmente, los rodillos (350, 360) están desplazados linealmente en la misma dirección y separados más entre sí debido a la fuerza de desviación.
16. El ensamblaje de mango de la reivindicación 13, 14 ó 15, en el que el elemento de desviación (320) comprende un muelle de torsión.
17. El ensamblaje de mango de la reivindicación 13, en el que el mecanismo de fuerza contraria (300) incluye una barra transversal (310) que se extiende desde el patín (42) y que está conectada al elemento de desviación (320), que comprende un muelle de torsión que tiene un primer y segundo brazos lineales (324, 326), estando conectado el primer brazo lineal (324) a una primera barra de rodillos (330) que se conecta al primer rodillo (350), estando conectado el segundo brazo lineal (326) a una segunda barra de rodillos (340) que se conecta al segundo rodillo (360), actuando la fuerza de desviación del elemento de desviación (320) para separar por fuerza el primer y segundo brazos lineales (324, 326) cuando el patín (42) está desplazado linealmente desde la posición neutra.
Patentes similares o relacionadas:
 SISTEMA DE DIRECCIONAMIENTO DE CATETER, del 7 de Octubre de 2010, de CATHRX LTD: Un mecanismo de direccionamiento de catéter, que incluye:
un miembro tubular que define un paso , teniendo el miembro tubular una porción […]
SISTEMA DE DIRECCIONAMIENTO DE CATETER, del 7 de Octubre de 2010, de CATHRX LTD: Un mecanismo de direccionamiento de catéter, que incluye:
un miembro tubular que define un paso , teniendo el miembro tubular una porción […]
 CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
 UN CONJUNTO DE DISPOSITIVO DE ESTILETE Y TUBO MEDICO, del 7 de Diciembre de 2009, de COVIDIEN AG: Un conjunto de tubo de íleo que comprende un dispositivo de estilete y un tubo de íleo que tiene un interior en el cual se inserta […]
UN CONJUNTO DE DISPOSITIVO DE ESTILETE Y TUBO MEDICO, del 7 de Diciembre de 2009, de COVIDIEN AG: Un conjunto de tubo de íleo que comprende un dispositivo de estilete y un tubo de íleo que tiene un interior en el cual se inserta […]
 CATETER MEDICO MULTIFUNCIONAL, del 6 de Noviembre de 2009, de BOSTON SCIENTIFIC LIMITED: Un catéter médico, que comprende: un cuerpo alargado flexible que tiene un extremo proximal y un extremo distal; una pluralidad […]
CATETER MEDICO MULTIFUNCIONAL, del 6 de Noviembre de 2009, de BOSTON SCIENTIFIC LIMITED: Un catéter médico, que comprende: un cuerpo alargado flexible que tiene un extremo proximal y un extremo distal; una pluralidad […]
Kit de tratamiento, dispositivo de medición y uso asociados, del 22 de Julio de 2020, de Perouse Medical: Kit de tratamiento que comprende: - una guía que consta de un extremo distal y un extremo proximal , - un dispositivo de determinación […]
Unidad de control unible a un endoscopio que tiene un árbol que puede desviarse a través de dos mandos rotatorios para permitir la operación de los mandos con una man, del 24 de Junio de 2020, de Human XTensions Ltd: Una unidad de control unible a un endoscopio , teniendo el endoscopio dos mandos rotatorios externos y un árbol que puede desviarse a través de los dos […]
Conjunto de catéter intermitente, del 24 de Junio de 2020, de HOLLISTER INCORPORATED: Un conjunto de catéter intermitente , que comprende: un elemento introductor alargado que tiene un extremo de inserción proximal […]
Tapón de catéter extraíble y aplicaciones del mismo, del 3 de Junio de 2020, de Pristine Access Technologies Ltd: Tapón de catéter extraíble , que comprende: un cuerpo de tapón configurado para […]