JUNTA DE ARTICULACIÓN PARA INSTRUMENTOS QUIRÚRGICOS.
Aparato quirúrgico (100) que comprende un mecanismo de accionamiento que puede hacerse funcionar desde una parte proximal del aparato quirúrgico (100);
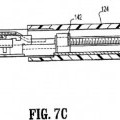
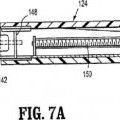
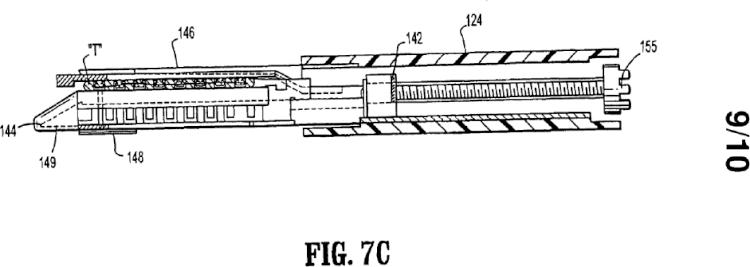
un conjunto de instrumentos (140) posicionado de manera pivotante en una parte distal del aparato quirúrgico (100) y que puede desplazarse entre una primera posición en la que el conjunto de instrumentos (140) está sustancialmente alineado con un eje longitudinal del aparato quirúrgico (100), y una segunda posición en la que el conjunto de instrumentos (140) se hace pivotar alejándose del eje longitudinal del aparato quirúrgico (100); un mecanismo de articulación (126) que puede posicionarse para desplazar el conjunto de instrumentos (140) entre las primera y segunda posiciones; un mecanismo de arrastre asociado funcionalmente con el mecanismo de accionamiento, incluyendo el mecanismo de arrastre un primer árbol de arrastre (65) engranado funcionalmente con un segundo árbol (150) en una junta de articulación (130), en el que el mecanismo de arrastre está configurado para transferir un movimiento rotacional desde el primer árbol de arrastre (65) hasta el segundo árbol (150) en las primera y segunda posiciones del conjunto de instrumentos (140), permitiendo la junta de articulación (130) que el primer árbol de arrastre (65) pivote con respecto al segundo árbol (150), en el que el primer árbol de arrastre (65) presenta una pluralidad de primeros dientes en una configuración circular (125) y el segundo árbol (150) presenta una pluralidad de segundos dientes en una configuración circular (155), engranándose los primeros dientes con los segundos dientes para transferir el movimiento de rotación; y un mecanismo de extensión (166) para desplazar distalmente el primer árbol de arrastre (65) cuando el conjunto de instrumentos (140) se desplaza desde la primera posición para mantener engranados dichos primeros dientes y segundos dientes
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08252971.
Solicitante: TYCO HEALTHCARE GROUP LP.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 60 MIDDLETOWN AVENUE NORTH HAVEN, CT 06473 ESTADOS UNIDOS DE AMERICA.
Inventor/es: VIOLA, FRANK, J..
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Septiembre de 2008.
Clasificación Internacional de Patentes:
- A61B17/072 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para aplicar una hilera de grapas en una sola operación.
Clasificación PCT:
- A61B17/072 A61B 17/00 […] › para aplicar una hilera de grapas en una sola operación.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2359675_T3.pdf
Fragmento de la descripción:
ANTECEDENTES
Campo técnico
La presente descripción se refiere a instrumentos quirúrgicos y, más particularmente, a instrumentos quirúrgicos para uso en intervenciones laparoscópicas y endoscópicas que tienen una junta articulada. 5
Antecedentes de la técnica relacionada
Las intervenciones quirúrgicas laparoscópicas y endoscópicas son intervenciones mínimamente invasivas en las que se llevan a cabo operaciones dentro del cuerpo por medio de instrumentos alargados insertados a través de pequeñas aberturas de entrada en el cuerpo. En intervenciones mínimamente invasivas, la abertura inicial en el tejido corporal para permitir el paso de instrumentos al interior del cuerpo puede ser un pasaje natural del cuerpo (por ejemplo, la boca 10 o el ano) o puede ser creada por un instrumento de perforación del tejido tal como un trocar. Con la ayuda de un conjunto de cánula insertado en la abertura, puede utilizarse entonces instrumental laparoscópico o endoscópico para realizar intervenciones quirúrgicas deseadas.
Debido a que los tubos endoscópicos y laparoscópicos, el instrumental y cualquier punción o incisión requerida son relativamente estrechos, la cirugía endoscópica y laparoscópica es menos invasiva y provoca muchos menos traumas 15 al paciente en comparación con las intervenciones en las que se requiere que el cirujano corte grandes zonas abiertas de tejido corporal. Las intervenciones laparoscópicas y endoscópicas requieren frecuentemente que el cirujano opere sobre órganos, tejidos y vasos alejados de la incisión. Así, los instrumentos utilizados en estas intervenciones son largos y estrechos y deben ser controlables funcionalmente desde un extremo de los mismos. La activación mecánica de tales instrumentos se limita generalmente al movimiento de los diversos componentes a lo largo de un eje 20 longitudinal formado por el instrumento de la parte endoscópica.
Los instrumentos laparoscópicos y endoscópicos convencionales incluyen un conjunto de mango, un elemento alargado que se extiende desde el conjunto de mango y un conjunto de instrumentos montado en el extremo distal del elemento alargado. El conjunto de instrumentos puede formar agarradores, fórceps, selladores de vasos, grapadoras quirúrgicas, aplicadores de pinzas y similares. El conjunto de mango puede configurarse con un disparador para la 25 activación manual del conjunto de instrumentos o puede incluir un conjunto de activación motorizado. Dependiendo del diseño del instrumento, la activación del conjunto de mango puede provocar que una varilla atraviese longitudinalmente el elemento alargado, activando así el conjunto de instrumentos montado sobre el extremo distal. Alternativamente, la activación del conjunto de mango puede provocar la rotación de un árbol de arrastre que se extiende en la longitud del elemento alargado. Son conocidos en la técnica ambos métodos para transferir la fuerza de activación desde el 30 conjunto de mango hasta el conjunto de instrumentos.
La patente US nº 5.653.374 del presente titular, concedida a Young et al., describe una grapadora quirúrgica para su utilización en intervenciones endoscópicas que utiliza un árbol de arrastre giratorio para transferir la fuerza de activación desde el conjunto de mango hasta el conjunto de instrumentos, en este caso una grapadora. La activación del conjunto de mango motorizado provoca la rotación del árbol de arrastre dentro del elemento de cuerpo alargado. El 35 árbol de arrastre está configurado de tal manera que la rotación del árbol provoca la activación del conjunto de grapado situado en el extremo distal del elemento de cuerpo alargado.
La patente US nº 5.830.221 del presente titular, concedida a Stein et al., describe un instrumento endoscópico para aplicar sujetadores que tiene un disparador para la activación manual del conjunto de mango. El apriete del disparador provoca un movimiento rotacional de un árbol de arrastre que a su vez activa el conjunto de instrumentos, un extremo 40 distal que dispensa sujetadores.
Las intervenciones endoscópicas y laparoscópicas se realizan sobre tejido dentro de la cavidad corporal a la que puede ser difícil acceder. Sea por la obstrucción de huesos, órganos y otros tejidos o bien simplemente por la configuración de la cavidad corporal, el acceso al tejido utilizando instrumentos endoscópicos o laparoscópicos convenciones puede ser una tarea muy exigente. La manipulación de un conjunto de instrumentos situado en el extremo distal de un árbol 45 rígido puede manifestarse una tarea muy exigente. Para abordar este problema y superar la incapacidad de alcanzar el tejido debido a la dificultad de acceso, se han desarrollado instrumentos endoscópicos y laparoscópicos con una junta articulada que permite que se articule un conjunto de instrumentos situado en el extremo distal de un elemento alargado. La patente US nº 5.690.269 del presente titular, concedida a Bolanos et al., describe una grapadora endoscópica que presenta un conjunto de grapado articulado. 50
El documento EP 1 813 207 se refiere a cierres electrónicos e instrumentos quirúrgicos que incluyen tales cierres. El instrumento quirúrgico incluye un efector extremo y un mango. El efector extremo incluye un canal, un yunque sujeto de manera pivotante al canal, un instrumento de corte móvil para cortar un objeto posicionado entre el yunque y el canal, y un cartucho de grapas configurado para ser recibido de forma retirable por el canal. El cartucho de grapas incluye un carro que se acopla con el instrumento de corte durante una carrera de corte. El mango incluye un motor para accionar 55 el instrumento de corte a través de un conjunto de árbol de arrastre principal. El instrumento quirúrgico comprende también un árbol de arrastre y un árbol de arrastre secundario. La rotación del árbol de arrastre efectúa la rotación del
árbol de arrastre secundario a través de un conjunto de ruedas dentadas cónicas.
Por tanto, sería beneficioso presentar un instrumento quirúrgico endoscópico que incluya una junta articulada para articular un conjunto de instrumentos montado en el extremo distal del mismo.
En la forma de realización según la invención se describe un aparato quirúrgico (100) que comprende: un mecanismo de accionamiento que puede hacerse funcionar desde una parte proximal del aparato quirúrgico (100); un conjunto de 5 instrumentos (140) posicionado de manera pivotante sobre una parte distal del aparato quirúrgico (100) y que puede moverse entre una primera posición en la que el conjunto de instrumentos (140) está sustancialmente alineado con un eje longitudinal del aparato quirúrgico (100), y una segunda posición en la que el conjunto de instrumentos (140) está pivotado hacia fuera del eje longitudinal del aparato quirúrgico (100); un mecanismo de articulación (126) que puede posicionarse para desplazar el conjunto de instrumentos (140) entre las primrea y segunda posiciones; un mecanismo 10 de arrastre asociado funcionalmente al mecanismo de accionamiento, incluyendo el mecanismo de arrastre un primer árbol de arrastre (65) acoplado funcionalmente al segundo árbol (150) en una junta de articulación (130), en donde el mecanismo de arrastre está configurado para transferir un movimiento rotacional desde el primer árbol de arrastre (65) hasta el segundo vástago (150) en las primera y segunda posiciones del conjunto de instrumentos (140), permitiendo la junta de articulación (130) que el primer árbol de arrastre (65) pivote con respecto al segundo árbol (150), en el que el 15 primer árbol de arrastre (65) presenta una pluralidad de primeros dientes en una configuración circular (125) y el segundo árbol (150) presenta una pluralidad de segundos dientes en una configuración circular (155), estando acoplados los primeros dientes con los segundos dientes para transferir el movimiento de rotación; y un mecanismo de extensión (166) para desplazar distalmente el primer árbol de arrastre (65) cuando se desplaza el conjunto de instrumentos (140) desde la primera posición. 20
BREVE DESCRIPCIÓN DE LOS DIBUJOS
Se describen a continuación las formas de realización del instrumento quirúrgico descrito en la presente memoria, que presenta una junta articulada, haciendo referencia a los dibujos, en los que:
La figura 1 es una vista en perspectiva de un instrumento quirúrgico según una realización de la presente descripción;
La figura 2 es una vista lateral en sección transversal del conjunto de mango del instrumento quirúrgico de la figura 1; 25
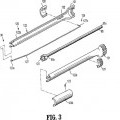
La figura 3 es una... [Seguir leyendo]
Reivindicaciones:
1. Aparato quirúrgico (100) que comprende
un mecanismo de accionamiento que puede hacerse funcionar desde una parte proximal del aparato quirúrgico (100);
un conjunto de instrumentos (140) posicionado de manera pivotante en una parte distal del aparato quirúrgico (100) y que puede desplazarse entre una primera posición en la que el conjunto de instrumentos (140) está sustancialmente 5 alineado con un eje longitudinal del aparato quirúrgico (100), y una segunda posición en la que el conjunto de instrumentos (140) se hace pivotar alejándose del eje longitudinal del aparato quirúrgico (100);
un mecanismo de articulación (126) que puede posicionarse para desplazar el conjunto de instrumentos (140) entre las primera y segunda posiciones;
un mecanismo de arrastre asociado funcionalmente con el mecanismo de accionamiento, incluyendo el mecanismo de 10 arrastre un primer árbol de arrastre (65) engranado funcionalmente con un segundo árbol (150) en una junta de articulación (130), en el que el mecanismo de arrastre está configurado para transferir un movimiento rotacional desde el primer árbol de arrastre (65) hasta el segundo árbol (150) en las primera y segunda posiciones del conjunto de instrumentos (140), permitiendo la junta de articulación (130) que el primer árbol de arrastre (65) pivote con respecto al segundo árbol (150), en el que el primer árbol de arrastre (65) presenta una pluralidad de primeros dientes en una 15 configuración circular (125) y el segundo árbol (150) presenta una pluralidad de segundos dientes en una configuración circular (155), engranándose los primeros dientes con los segundos dientes para transferir el movimiento de rotación; y
un mecanismo de extensión (166) para desplazar distalmente el primer árbol de arrastre (65) cuando el conjunto de instrumentos (140) se desplaza desde la primera posición para mantener engranados dichos primeros dientes y segundos dientes. 20
2. Aparato quirúrgico (100) según la reivindicación 1, en el que el mecanismo de arrastre comprende un árbol de arrastre (65) que presenta un primer engrane (125) en un extremo distal del mismo.
3. Aparato quirúrgico (100) según la reivindicación 2, en el que la junta de articulación (130) comprende la primera rueda dentada (125) y una segunda rueda dentada (155) engranada con la primera rueda dentada (125).
4. Aparato quirúrgico (100) según la reivindicación 3, en el que el mecanismo de arrastre comprende un tornillo de 25 arrastre (150), presentando el tornillo de arrastre (150) la segunda rueda dentada (155) en un extremo proximal del mismo.
5. Aparato quirúrgico (100) según la reivindicación 4, que comprende además un conjunto de accionador de leva (149) engranado de manera roscada con el tornillo de arrastre (150).
6. Aparato quirúrgico (100) según la reivindicación 5, que comprende además por lo menos una cuña de leva dispuesta 30 para el avance por el accionador de leva (149).
7. Aparato quirúrgico (100) según cualquiera de las reivindicaciones 3 a 6, en el que el mecanismo de arrastre hace avanzar a por lo menos una cuña de leva a través de un cartucho de grapas (144).
8. Aparato quirúrgico (100) según cualquiera de las reivindicaciones 2 a 7, en el que el mecanismo de extensión (166) comprende un resorte (166a) engranado a una primera parte y una segunda parte del árbol de arrastre (65). 35
9. Aparato quirúrgico (100) según cualquiera de las reivindicaciones 2 a 8, en el que el mecanismo de accionamiento comprende un mango móvil (116) y una rueda dentada (62, 62, 66) sujeta al árbol de arrastre (65) para la rotación del árbol de arrastre (65).
10. Aparato quirúrgico (100) según cualquiera de las reivindicaciones 1 a 9, en el que el mecanismo de accionamiento comprende un motor. 40
11. Aparato quirúrgico (100) según cualquiera de las reivindicaciones 1 a 10, en el que el conjunto de instrumentos (140) comprende un cartucho de grapado quirúrgico (144).
12. Aparato quirúrgico (100) según la reivindicación 11, en el que el conjunto de instrumentos (140) comprende un carro con una o más cuñas de leva.
Patentes similares o relacionadas:
 Estructura para la fijación de material de refuerzo a yunques y cartuchos de grapadoras quirúrgicas, del 29 de Julio de 2020, de Covidien LP (100.0%): Un efector final de una grapadora quirurgica, que comprende:
un par de mordazas que incluyen un cartucho de grapas y un yunque, el cartucho […]
Estructura para la fijación de material de refuerzo a yunques y cartuchos de grapadoras quirúrgicas, del 29 de Julio de 2020, de Covidien LP (100.0%): Un efector final de una grapadora quirurgica, que comprende:
un par de mordazas que incluyen un cartucho de grapas y un yunque, el cartucho […]
Adaptadores quirúrgicos para usar entre el conjunto de mango quirúrgico y las unidades de carga quirúrgica, del 22 de Julio de 2020, de Covidien LP (100.0%): Un conjunto adaptador para interconectar selectivamente una unidad de carga quirúrgica y un conjunto de mango que tiene al menos un […]
Aparatos de grapado quirúrgico, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aparato de grapado quirúrgico , que comprende: una carcasa que tiene un actuador ; un miembro alargado que se extiende desde la carcasa; […]
Conjunto de herramienta con espacio muerto mínimo, del 1 de Julio de 2020, de Covidien LP (100.0%): Un dispositivo de grapado quirúrgico que comprende: un cuerpo alargado ; y un conjunto de herramienta soportado en una porción distal […]
Recarga con sistema de estabilización de articulación, del 1 de Julio de 2020, de Covidien LP (100.0%): Una recarga para una grapadora quirúrgica configurada para acoplarse de manera liberable a un adaptador , dicha recarga que […]
Grapadora quirúrgica con mordaza expandible, del 13 de Mayo de 2020, de APPLIED MEDICAL RESOURCES CORPORATION: Una grapadora quirúrgica que comprende: un eje alargado , que tiene un extremo proximal y un extremo distal , y que define […]
Aparato de grapado quirúrgico, que incluye un aditamento de refuerzo, del 13 de Mayo de 2020, de Covidien LP (100.0%): Un aparato para unir dos secciones de órganos huecos con una matriz anular de grapas quirúrgicas, el aparato que comprende: un componente de cartucho de […]
Componente de disparo de uso en grapadora y grapadora, del 13 de Mayo de 2020, de Touchstone International Medical Science Co., Ltd: Un conjunto de disparo para una grapadora quirúrgica, que comprende: una carcasa ; una cámara de presión, que está […]