Instrumento de puntería para la determinación de un eje mecánico del fémur.
Aparato para la determinación de un plano conteniendo el eje mecánico del fémur comprendiendo un dispositivo enel que se prevé:
- un medio mecánico de elementos articulados y/o deslizantes (3, 140, 150) para la determinación y lamemorización de dos posiciones en el espacio (F1 y F2) de un mismo punto cualquiera (F) de la rodilla cuando éstese encuentra en posición P1 y P2, con respecto a un referencial configurado para ser fijo con respecto a la pelvisdel paciente, dichas posiciones siendo obtenidas por pivote del miembro inferior desde la posición P1 a la posiciónP2, alrededor del centro de la cabeza femoral
- un medio mecánico para materializar la orientación de un plano omega que pasa por el centro del segmento derecta definido por dichas dos posiciones F1 y F2, perpendicularmente a este segmento y conteniendo el centro dela cabeza femoral.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/BE2006/000049.
Solicitante: COLLETTE, MICHEL.
Nacionalidad solicitante: Bélgica.
Dirección: 11 AVENUE DU MARECHAL 1180 BRUXELLES BELGICA.
Inventor/es: COLLETTE,MICHEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/15 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Dispositivos de guiado al efecto.
- A61G13/00 A61 […] › A61G MEDIOS DE TRANSPORTE, MEDIOS DE TRANSPORTE PERSONALES O DISPOSICIONES ESPECIALMENTE ADAPTADAS PARA ENFERMOS O PARA INVALIDOS (aparatos para ayudar a caminar a enfermos o a inválidos A61H 3/00 ); SILLAS O MESAS DE OPERACIONES; SILLONES DE DENTISTA; DISPOSITIVOS DE INHUMACION (embalsamado cadáveres A01N 1/00). › Mesas de operaciones; Sus accesorios (iluminación de mesas de operaciones F21L, F21S o F21V).
PDF original: ES-2391105_T3.pdf
Fragmento de la descripción:
Instrumento de puntería para la determinación de un eje mecánico del fémur.
La presente invención se refiere particularmente a un aparato y a un método para ayudar a determinar o estimar la orientación del eje mecánico del fémur.
De hecho es bien conocido que una prótesis de rodilla se debe colocar perpendicularmente al eje mecánico del miembro inferior. Este eje pasa por el centro de rotación de la cadera, el centro de la rodilla y el centro del tobillo. Una artroplastia de la rodilla exige en consecuencia la realización de cortes óseos al nivel de la parte distal del fémur con una orientación lo más precisa posible.
ESTADO DE LA TÉCNICA ANTERIOR
El método tradicional para alcanzar este objetivo consiste en medir en una gran radiografía preoperatoria del miembro inferior el ángulo (alfa) entre el eje diafisario (a) del fémur (real) y el eje mecánico (M) (virtual) . Durante la intervención, se utiliza el eje diafisario femoral para introducir allí una varilla guía para poder ensartar los instrumentos de corte con un ángulo igual al ángulo alfa medido en la radiografía preoperatoria.
Más recientemente, la navegación informática ha permitido modelizar el fémur operado y visualizar virtualmente su eje mecánico de manera a ajustar la colocación de la prótesis según un plano lo más próximo posible al plano perpendicular a este eje.
El primer método, utilizado tradicionalmente desde hace varios años, desgraciadamente carece de precisión. De hecho, puede haber errores de medida de ángulo en el cliché preoperatorio (errores de rotación etc.) . También puede haber varios grados de imprecisión en la introducción de la varilla metálica en la diáfisis femoral en caso de que esta diáfisis sea relativamente ancha y permita cierta libertad al trayecto de la varilla. Por lo tanto no es raro constatar en los clichés postoperatorios que una prótesis fue colocada con más de tres grados de separación con respecto al eje ideal. Además, la introducción de la varilla en la diáfisis femoral presenta ciertos inconvenientes ya que destruye en cierta medida la médula ósea diafisaria y que se han descrito embolias grasientas en postoperatorio posiblemente ligadas a la introducción de esta varilla.
El segundo método, llamado de navegación informática, parece más preciso y los estudios sobre la eficacia de este método demuestran claramente que éste permite obtener una reducción significativa del grado de error de posicionamiento de la prótesis con respecto al eje mecánico.
Sin embargo, este método requiere por una parte el despliegue de medios técnicos sofisticados y costosos, y por otra parte la implementación de este método conduce en general a un incremento del tiempo operatorio generalmente evaluado entre 20 y 30 minutos.
De manera más específica, el estado de la técnica anterior se puede representar particularmente por los documentos siguientes:
- FR 2 829 376
Bergue Bertrand
- US 5 690 638 Dance et al
- WO 2004/041097 Aesculap AG & Co. KG
- WO 02/47559 Aesculap AG & Co. KG
- EP 1 421 042 Zimmer Technology, Inc.
- EP 0 839 501 Osteonics Corp
- EP 0 677 274 Osteonics Corp
- US5611353 Osteonics Corp
En este último documento se describe un método en el que se determina al menos tres puntos del espacio correspondiente a tres posiciones de la rodilla y un ordenador calcula y deduce la posición del centro de la cabeza femoral.
La presente invención permite conocer de manera sencilla, rápida y poco costosa la localización exacta del eje mecánico con respecto a la rodilla y en consecuencia ajustar con una gran precisión el posicionamiento de la prótesis con respecto a este eje. Permite también evitar el hecho de colocar una varilla metálica al interior de la cavidad medular femoral.
EXPOSICIÓN GENERAL DE LA INVENCIÓN
Según la invención se propone de forma general un aparato destinado a ayudar a determinar el eje mecánico del fémur o de la dirección del centro de la cabeza femoral con respecto al centro de la rodilla.
Según un primer aspecto de la invención, se propone un aparato para determinar un plano conteniendo el eje mecánico del fémur que incluye:
- un medio mecánico de elementos articulados y/o deslizantes para la determinación y la memorización de dos posiciones en el espacio (F1 y F2) de un mismo punto cualquiera (F) de la rodilla cuando éste se encuentra en posición P1 y P2, con respecto a un referencial configurado para ser fijo con respecto a la pelvis del paciente, dichas posiciones siendo obtenidas por pivote del miembro inferior desde la posición P1 hasta la posición P2, alrededor del centro de la cabeza femoral,
- un medio mecánico para materializar la orientación de un plano (omega) que pasa por el centro del segmento de la recta definido por dichas dos posiciones F1 y F2, perpendicularmente a este segmento e incluyendo el centro de la cabeza femoral.
Los medios de localización pueden ser elementos cilíndricos, por ejemplo huecos, adaptados para posicionarse de manera precisa sobre un punto de referencia fijado en el punto F de la rodilla. Estos medios de localización pueden ser guías de perforación para insertar o retirar un husillo que sirve de punto de referencia.
Además de un husillo, otros tipos de punto de referencia se pueden proponer por ejemplo por marcado con láser o mediante el uso de un lápiz o marcador quirúrgico.
El medio para materializar la orientación es de preferencia un medio mecánico que permite orientar una varilla al centro de, y perpendicularmente, con respecto al segmento de la recta mediante la separación de dichos dos medios de localización.
Se puede prever también de manera ventajosa un medio que permite desolidarizar dicha varilla por ejemplo, para recolocarla y fijarla sobre el fémur.
El aparato se puede concebir para permitir dicho pivote en un plano frontal, en un plano sagital o de preferencia en ambos planos.
El aparato se fija a un referencial que puede ser por ejemplo una mesa de operación o la pelvis del paciente, por ejemplo al nivel del hueso ilíaco, más particularmente de la cresta ilíaca.
Se comprenderá que otras variantes son posibles para colocar articulaciones y deslizamientos con el fin de obtener un resultado similar.
De este modo según otra variante, un sistema de cuatro varillas articuladas formando un paralelogramo, del tipo pantógrafo, se puede utilizar ventajosamente. Uno de las vértices del paralelogramo, solidario de una estructura de soporte con la mesa de operación o la pelvis del paciente, se inmoviliza con respecto al referencial seleccionado y determina, con la ayuda de un medio de localización, el punto F1 en la posición P1 de la rodilla. El vértice opuesto se puede disponer libremente por estiramiento frente a la posición P2 para determinar F2 por un segundo medio de localización. Una varilla solidarizada mecánicamente y que pasa por los otros dos vértices indicará la dirección del centro de la cabeza femoral. En este sistema ya no se debe ajustar la posición del miembro inferior en la posición impuesta por el instrumento. Al contrario el instrumento es el que va a buscar la posición de F2 por desplazamiento de un vértice del pantógrafo hasta que éste coincida con la posición en el espacio ocupado por el punto de referencia ósea.
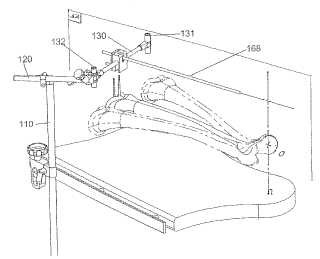
Según otra variante, se puede concebir una barra, en forma de brazo, de preferencia una barra graduada, fija, perpendicular o no al eje de la mesa de operación, o pivotante, comprendiendo un cursor provisto con un medio de localización, que se acciona para deslizarse en la extremidad del brazo y determinar el punto F2 en posición P2 de la rodilla. El cursor se desplaza a lo largo de una sección de extremidad distal del brazo comprendiendo de preferencia una ranura para dejar pasar el medio de localización. El segundo medio de localización se fija sobre la barra para determinar el punto F1 en posición P1, al nivel o no del pivote eventual. Un segundo cursor se puede deslizar sobre la barra y ser conducido al centro de los dos medios de localización inmovilizados de manera conocida... [Seguir leyendo]
Reivindicaciones:
1. Aparato para la determinación de un plano conteniendo el eje mecánico del fémur comprendiendo un dispositivo en el que se prevé:
- un medio mecánico de elementos articulados y/o deslizantes (3, 140, 150) para la determinación y la memorización de dos posiciones en el espacio (F1 y F2) de un mismo punto cualquiera (F) de la rodilla cuando éste se encuentra en posición P1 y P2, con respecto a un referencial configurado para ser fijo con respecto a la pelvis del paciente, dichas posiciones siendo obtenidas por pivote del miembro inferior desde la posición P1 a la posición P2, alrededor del centro de la cabeza femoral
- un medio mecánico para materializar la orientación de un plano omega que pasa por el centro del segmento de recta definido por dichas dos posiciones F1 y F2, perpendicularmente a este segmento y conteniendo el centro de la cabeza femoral.
2. Aparato según la reivindicación 1 en el que dicho medio mecánico de elementos articulados y/o deslizantes (3, 140, 150) comprende un elemento (4) que incluye los dos medios de memorización (en 30, 30') de dos posiciones en el espacio y destinado a ser inmovilizado con respecto a dicho referencial.
3. Aparato según la reivindicación 1 o 2 en el que se prevé para la memorización de los puntos F1 y F2 al menos un medio de inmovilización mecánico de una barra articulada (4, 130) soportada por un dispositivo con al menos tres grados de libertad y comprendiendo al menos dos medios de localización (30, 131, 132) de dicho punto F cualquiera de la rodilla.
4. Aparato según la reivindicación 3 en el que el dispositivo incluye un grado de libertad de rotación alrededor de un eje perpendicular al plano sagital o frontal.
5. Aparato según la reivindicación 3 o 4 en el que los medios de localización son elementos cilíndricos huecos (30) adaptados para posicionarse de manera precisa sobre un punto de referencia fijado en el punto F de la rodilla, punto de referencia obtenido por ejemplo por la acción de un haz láser, de un lápiz o marcador quirúrgico o de un bisturí eléctrico.
6. Aparato según cualquiera de las reivindicaciones 2 a 5 en el que los medios de localización comprenden guías de perforación (30, 131, 132) o de marcado.
7. Aparato según la reivindicación precedente en el que el punto de referencia es un husillo (35, 180) eventualmente roscado.
8. Aparato según la reivindicación 2 en el que el medio para materializar la orientación del plano omega es un medio mecánico que permite orientar un elemento de dirección (12, 168) hacia el centro y perpendicularmente al segmento de la recta que separa los dos medios de localización (5, 6, 131, 132) .
9. Aparato según la reivindicación precedente en el que se prevé además un medio que permite disponer y fijar sobre el fémur el elemento de dirección de dicho centro de la cabeza del fémur.
10. Aparato según la reivindicación precedente en el que el elemento de dirección es una varilla (12, 168) .
11. Aparato según la reivindicación precedente en el que la varilla incluye un medio de fijación al fémur y se puede desolidarizar del resto del aparato.
12. Aparato según cualquiera de las reivindicaciones precedentes en el que dicho referencial es una mesa de operación.
13. Aparato según cualquiera de las reivindicaciones precedentes en el que dicho referencial es la pelvis asociada a dicho fémur.
14. Aparato según la reivindicación 13 que incluye un medio de fijación (210) a dicha pelvis, por ejemplo al nivel del hueso ilíaco, por ejemplo al nivel de la cresta ilíaca.
15. Aparato según cualquiera de las reivindicaciones precedentes en el que el medio mecánico de elementos
articulados incluye cuatro varillas articuladas que forman un paralelogramo cuyos vértices opuestos (58, 59) se 13
proveen con medios de localización, uno de los vértices (58) siendo solidarizado a dicho referencial, y los otros dos vértices (51, 52) siendo asociados al medio para determinar la orientación del plano omega.
16. Aparato según cualquiera de las reivindicaciones 1, 3 a 14 en el que uno de los medios de localización (62) se sitúa
sobre un brazo deslizante (63) en o a lo largo de otro brazo (60) fijado en dicho referencial y comprendiendo el otro medio de localización (61) .
17. Aparato según cualquiera de las reivindicaciones 1 a 16 caracterizado por el hecho que comprende también un conjunto de ajuste por elementos articulados (140) destinado a hacer pivotar en un ángulo de 90° dicho medio
mecánico de elementos articulados o deslizantes (150) de modo que la barra de ajuste final puede pasar de un plano frontal a un plano sagital.
Patentes similares o relacionadas:
Sistema de instrumentos quirúrgicos ortopédicos para preparar quirúrgicamente el fémur de un paciente, del 22 de Julio de 2020, de DePuy Ireland Unlimited Company: Un sistema de instrumentos quirúrgicos ortopédicos que comprende: un bloque de corte femoral que incluye una pluralidad de ranuras […]
Sistema para preparar la tibia de un paciente en un procedimiento de reemplazo de articulación ortopédica, del 15 de Julio de 2020, de DePuy Ireland Unlimited Company: Un sistema de instrumentos quirúrgicos ortopédicos que comprende: un escariador quirúrgico que incluye un eje alargado y una pluralidad de estrías de […]
Instrumento quirúrgico ortopédico, del 13 de Mayo de 2020, de DePuy Ireland Unlimited Company: Un montaje de instrumento quirúrgico ortopédico para preparar el fémur de un paciente en un procedimiento de reemplazo de rodilla, que comprende: […]
Dispositivo quirúrgico para osteotomías, del 13 de Mayo de 2020, de A Plus Biotechnology Company Limited: Dispositivo quirúrgico para osteotomías que comprende: un primer componente de cuerpo que tiene un borde de guía superior para formar un recorrido de […]
Dispositivo quirúrgico para osteotomías, del 13 de Mayo de 2020, de A Plus Biotechnology Company Limited: Dispositivo quirúrgico para osteotomías que comprende: un primer componente de cuerpo que tiene un borde de guía superior y una […]
Instrumento quirúrgico ortopédico personalizado específico de un paciente, del 13 de Mayo de 2020, de DEPUY PRODUCTS, INC.: Un método de fabricar un bloque de corte de hueso personalizado específico al paciente, comprendiendo el método: determinar , […]
Instrumento quirúrgico ortopédico personalizado específico de un paciente, del 13 de Mayo de 2020, de DEPUY PRODUCTS, INC.: Un método implementado por ordenador de diseño de un bloque de corte de hueso personalizado específico para el paciente para su uso en un procedimiento quirúrgico […]
Instrumento quirúrgico ortopédico personalizado específico de un paciente, del 6 de Mayo de 2020, de DEPUY PRODUCTS, INC.: Un instrumento ortopédico personalizado específico para el paciente, que comprende: un bloque de corte personalizado específico para […]