INSTALACION AUTOMATICA DE ESTACIONAMIENTO DE VEHICULOS CON DISPOSITIVO AUTOMATICO DE ESTACIONAMIENTO Y SU PROCEDIMIENTO DE APARCAMIENTO.
Instalación automática de estacionamiento de vehículos con dispositivo automático de estacionamiento y su procedimiento de consistente en:
a. una o varias zonas de transferencia (3) con entrada y salida de vehículos y personas y un hueco para elevador,
b. una zona de maniobra con:
- transporte vertical consistente en uno o varios elevadores (5) abiertos hasta por los cuatros costados que incluye una pareja motorizada de banda pisables o cama de rodillos y un mecanismo de giro entre la cabina (51) (5) y su plataforma (52),
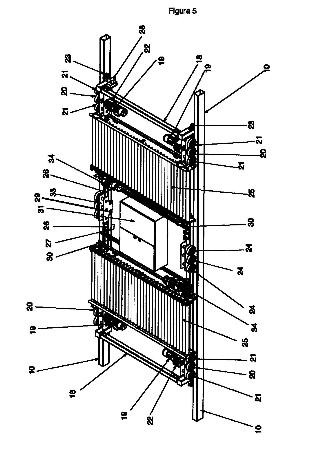
- transporte horizontal consistente en un robot (7, 37) desplazable sobre unos raíles (10) sustentados sobre hormigón y estructura metálica (48), incluyendo el robot (7, 37) dos bandas pisables (32) o camas de rodillos (25) motorizados independientes, cuatro conjuntos de ruedas (20) motorizadas independientes acompañadas de ruedas locas (21, 24),
c. plazas (9) de aparcamientos basados en parejas de camas de rodillos (11) motorizados.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201000366.
Solicitante: ROBOTICA Y MECANIZADOS, S.L.
Nacionalidad solicitante: España.
Inventor/es: RARO ALMUZARA,Francisco.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E04H6/24 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04H EDIFICIOS O CONSTRUCCIONES SIMILARES PARA EMPLEOS PARTICULARES; PISCINAS PARA NADAR O PARA CHAPOTEAR; MASTILES; BARRERAS; TIENDAS O REFUGIOS PROVISIONALES, EN GENERAL (cimentaciones E02D). › E04H 6/00 Edificios para guardar vehículos, material rodante, aviones, barcos o cualesquiera otros vehículos, p. ej. garajes (tiendas que sirven para garajes E04H 15/00; soportes de bicicletas B62H; puesta en tierra de embarcaciones B63C 15/00; estructuras de las superficies portantes en el suelo E01C; marcado de las áreas de estacionamiento sobre el suelo E01F 9/00; construcción de edificios en general E04B 1/00). › caracterizados por el empleo de carretones para transporte horizontal.
Fragmento de la descripción:
Instalación automática de estacionamiento de vehículos con dispositivo automático de estacionamiento y su procedimiento de aparcamiento
Sector de la técnica.
La presente invención se refiere a una instalación automática de estacionamiento de vehículos realizado con la ayuda de un dispositivo automático de estacionamiento de vehículos o robot. Por tanto, esta invención se encuadra dentro del sector de la técnica aparcamientos automatizados.Estado de la Técnica.
En la actualidad, las grandes ciudades sufren una gran carencia de espacio para aparcamiento de vehículos debido a dos causas fundamentales. La primera de ellas es el aumento del parque automovilístico. Se ha pasado de un número de vehículos por unidad familiar de O o 1 vehículo a 2 o 3 vehículos por familia. Esto hace que se necesite disponer de más lugares de aparcamiento para poder estacionar los vehículos. La segunda razón es la falta de previsión en cuanto a la construcción de los edificios, ya que el aumento del número de vehículos no estaba contemplado hace varias décadas y por tanto, los edificios construidos en el siglo XX no incluían en general con el espacio necesario para albergar a un número mínimo de vehículos.
Los actuales sistemas de aparcamientos robotizados se caracterizan por desplazar los vehículos encima de elementos, de manera similar a los almacenes robotizados para pallets, tal y como se describe en los documentos de patente españoles 2.135.683, 2.065.046 T3 Y 2.064.115 T3. Por norma general, disponen de una máquina para el desplazamiento vertical y otra para el desplazamiento horizontal, aunque en numerosos casos, ambos movimientos se realizan mediante una única máquina y de manera simultánea. En este último caso, la obra civil ve aumentada su dificultad al tener que partir cualquier losa o forjado horizontal para permitir el paso de esta maquinaria. Cuando, por motivos de número de plazas, la excavación empieza a ser importante, los problemas en el sostenimiento de los edificios adyacentes empiezan a aparecer, siendo necesario un cálculo mucho más fino y la realización de estructuras mucho mayores, capaces de absorber todas las cargas y los esfuerzos derivados del aparcamiento robotizado.
En el caso de instalaciones realizadas en altura, como la descrita en el documento de patente española 2.119.621 así como el documento W02006/041252 el problema se plantea por la falta de apoyos entre las posibles estructuras que se situarían a ambos lados del carril por donde circula esa maquinaria. Esto conlleva problemas similares a los ocasionados en excavaciones, con un mayor nivel de detalle en los cálculos y un incremento importante en cuanto a material se refiere.
El otro aspecto que hemos mencionado es el traslado de los vehículos sobre estructuras a modo de pallets. La problemática que se plantea con este tipo de traslados es la necesidad de contar con un lugar para almacenar estos pallets, así como contar con un número determinado para poder dar servicio a todas las plazas que se tienen diseñadas. Otro inconveniente viene desde el punto de la operatividad, ya que se necesitan mayor número de maniobras para realizar ciertos movimientos, como por ejemplo recoger o dejar pallets vacíos que permitan la entrada o salida de los vehículos.
Explicación de la invención.
La instalación automática de estacionamiento de vehículos basado en el dispositivo automático de estacionamiento pretende resolver los dos siguientes problemas planteados con los sistemas tradicionales:
a) Facilitar que la construcción de la obra civil sea relativamente sencilla, al
poder disponer de forjados que unan los muros en las excavaciones o bien refuerzos que unan estructuras cuando se realiza el aparcamiento sobre rasante.
b) No utilizar pallets para depositar los vehículos. Para ello, se utilizará un sistema electromecánico que mueve el vehículo directamente, sin necesidad de espacio adicional para almacenar pallets y reduciendo las maniobras ya que no es necesario dejar o recoger pallets vacíos.
La instalación de estacionamiento automático se compone principalmente de cuatro zonas conceptuales diferenciadas. Cada zona se refiere a un espacio utilizado para un fin determinado, de tal manera que si un determinado espacio cambia de fin, este cambia de nombre:
• Zona de espera.
Es el espacio destinado a vehículos que se encuentran a la espera de poder acceder a la zona de transferencia.
• Zona de transferencia.
Es la zona del estacionamiento automático del aparcamiento hacia la cual son transferidos los vehículos o a partir de la cual son recuperados con el fin de llegar a la zona de maniobra. Para ello, el aparcamiento cuenta con un sistema electrónico industrial que gestiona estas maniobras. Este sistema está compuesto por autómatas programables (PLC) que recogen las señales de la sensorización que se encuentra distribuida por el aparcamiento y remite las correspondientes órdenes a los dispositivos y aparatos que componen el aparcamiento.
Por tanto, para que el sistema pueda realizar todos los procesos encaminados a depositar el vehículo en una plaza determinada, el usuario deberá depositar su vehículo en una zona controlada de tal modo que el sistema pueda comprobar todas las dimensiones del vehículo y verifique su correcta colocación, mediante la utilización de escáneres, láser de detección de anchura y la longitud del vehículo y fotocélula para la altura. Por otro lado, la zona de transferencia contará con los medios necesarios para ayudar al usuario al correcto posicionamiento del vehículo, tales como paneles luminosos o pantallas alfanuméricas de visualización de datos, donde se irán mostrando los mensajes apropiados, así como con toda la sensorización utilizada por el sistema para la verificación de las dimensiones del vehículo.
En la zona de transferencia el sistema deposita el vehículo para que pueda ser accesible al usuario. De esta forma se permite al conductor salir o subir al vehículo para que pueda recuperar su vehículo, bien para abandonar el aparcamiento o bien para recoger algún objeto del interior de su vehículo.
Para que el usuario pueda acceder a la zona de transferencia, se debe haber terminado todas las maniobras necesarias para colocar el vehículo de la manera solicitada, que dependerá de la maniobra solicitada. En el caso de que el usuario desee recoger algún tipo de objeto del interior del vehículo, el sistema posicionará el vehículo de tal modo que el maletero quede lo más accesible para el usuario, es decir, tal y como se depositó el vehículo en la maniobra de entrada. Cuando el usuario selecciona la maniobra de retirar el vehículo, el sistema lo deja orientado hacia la salida, de tal modo que se facilita la maniobra.
El acceso a la instalación se puede realizar directamente desde la calle. Para ello la zona de transferencia se sitúa a nivel de acera de tal forma que se puede realizar a modo de local del edificio o bien una vez dentro del edificio mediante habitáculos acondicionados para este fin. En ambos casos, se deberá habilitar una zona para la espera de los vehículos que deberá quedar dentro de los límites del edificio.
• Zona de maniobra.
En esta zona el sistema realiza las maniobras necesarias para meter o sacar el vehículo del silo. En esta zona, se encuentra el sistema de transporte vertical compuesto por elevadores y horizontal de los vehículos compuesto por uno o varios robots.
• Zona de depósito de los vehículos.
Zona del garaje no accesible al usuario en el que se depositan los vehículos hasta su entrega al dueño. Se denomina también silo de almacenamiento.
Las diferentes operaciones que un usuario puede realizar en este aparcamiento robotizado se resumen en:
• Maniobra de entrada de vehículo.
• Maniobra de recogida de objetos de vehículo.
• Maniobra de retirada de vehículo.
Todas las maniobras se controlan a través de electrónica basada en autómatas programables (PLC) que recogen las señales de la sensorización que se encuentra distribuida por el aparcamiento. Dentro de esta sensorización mencionada se pueden distinguir los siguientes tipos de sensores:
Células fotoeléctricas para el control de la posición de los vehículos en las plazas yen las bandas pisables. Podrán ser del tipo emisor-receptor
o bien por reflexión. Sensores ultrasónicos, para detectar presencia de vehículo sobre el robot o el elevador. Límites de recorrido, tanto para las plazas como para los recorridos de los robots. Escáneres láser para el control de las dimensiones de los vehículos....
Reivindicaciones:
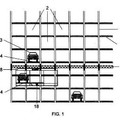
1. Instalación de estacionamiento automático constituida por un silo (1) de almacenamiento de vehículos de uno o varios niveles (4) en el que se diferencia entre tres zonas diferentes,
a. una o varias zonas de transferencia (3) de vehículos,
b. una zona de maniobra de vehículos con uno o varios elevadores industriales (5) y un robot distribuidor (7, 37) de vehículos desplazable sobre unos raíles (10) , desde la zona de transferencia a la zona de deposito o plazas (9)
c. y zona de deposito o plazas (9) de aparcamientos basados en parejas de camas de rodillos (47) ,
Y un sistema electrónico industrial de autómatas programables (PLC) del transporte de vehículos entre la zona de transferencia (3) y las plazas (9) ,
caracterizado porque en cada zona de maniobra de vehículos:
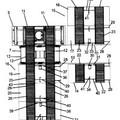
• el elevador (5) incluye un mecanismo de giro (54) entre la cabina (51) del elevador (5) y la plataforma (52) ,
• los raíles (10) de perfil metálico sobre los que se traslada el robot (7, 37) incluyen una banda plástica continua en el que se inserta de manera consecutiva y sin discontinuidad grupos diferenciados de código de barras (50) consecutivos,
• el robot (7, 37) portador de vehículos de distribución comprende:
• cuatro conjuntos de tres ruedas (21, 20, 21) instaladas en soportes
(33) en forma de "T" en cada uno de los extremos del larguero (26) del bastidor (18) y dispuestos de manera longitudinal, incluyendo las tres ruedas (21 , 20, 21) de llanta metálica y recubiertas de Vulkollan dispuestas de manera equidistante, estando la rueda motriz central
(20) acoplada a través de un acoplamiento tipo flexible (22) a un conjunto motriz (19) compuesto por un motor y un reductor asíncrono y siendo las otras dos ruedas del tipo loca (21) Y
realizándose la unión del soporte "T" (33) al bastidor (18) mediante bu Iones (29) de acero,
• dos conjunto de tres ruedas locas (24) instaladas en soportes (33) en forma de "T" ubicados en la parte central de cada uno de los largueros (26) del bastidor (18) , realizándose la unión del soporte "T"
(33) al bastidor (26) del robot (7) mediante bulones (29) de acero,
• dos conjuntos motorizados (33 o 34) de carga y descarga de vehículos independientes montados cada uno sobre el bastidor (18) y ubicados entre el conjunto de ruedas locas (24) y el conjunto motriz (20, 21) , acoplándose cada conjunto motorizado a través de una acoplamiento flexible (22) al conjunto motriz (34, 35) compuesto por un motor y un reductor,
• un sistema de posicionamiento basado en un lector de código de barras (27) ubicado en la parte inferior de un larguero (26) del bastidor (18) ,
• cuatro rueda locas (23) instaladas transversalmente en cada uno los extremos de los dos largueros (26) del bastidor (18) ,
• un dispositivo de emisor (28) de datos tipo infrarrojo ubicado junto a una de las ruedas locas (23) en uno de los extremos del larguero (26) del bastidor el bastidor (18) ,
• cuadros eléctricos, tanto de fuerza como de control, así como sensores,
y porque cada zona de deposito o plazas (9) de aparcamientos a los que llega el robot (7, 37) comprende una pareja de camas de rodillos (47) que descansan cada una de ellas sobre una estructura metálica disponiendo cada cama de rodillos (47) en su extremo de un piñón que se acopla mediante un acoplamiento tipo flexible a un solo conjunto motriz (11) compuesto por un motor y una reductora,
y porque el sistema electrónico industrial de autómatas programables (PLC) del transporte de vehículos entre la zona de transferencia (3) y las plazas (9) que controlan el desplazamiento de los vehículos y robot (7, 37) en la instalación incluye:
• sensores de tipo células fotoeléctricas que se ubican en las plazas del aparcamiento y en las bandas pisables y son de tipo emisor-receptor o reflexión,
• sensores ultrasónicos que se ubica en el bastidor (18) del robot (7, 37) Y el elevador (5) ,
• limitadores de recorrido que se ubican en las plazas, en los raíles y en los robots,
• detectores volumétricos que se ubican en las zonas de transferencia, y porque las comunicaciones entre los autómatas y los diferentes sensores se realizan punto a punto entre el sensor y las bornas de entrada de señales o mediante buses de campo y utilizando un protocolo de comunicaciones tipo Profibus estando el sistema de transmisión de datos por infrarrojo del robot (7, 37) constituido por un emisor (28) instalado en el bastidor (18) del robot y un receptor de señal fijo ubicado en uno de los extremos del carril (10) .
2. Instalación de estacionamiento automático según reivindicación 1 caracterizado porque el elevador (5) es accesible a los usuario y existe un robot (37) por cada elevador y porque el elevador (5) incluye dos bandas pisables (14) ubicadas transversalmente, de plástico modular, con aberturas inferiores de tres centímetros, y porque el robot (37) de distribución incluye:
• un bastidor (18) de tubo estructural atornillado que incluye un emparrillado (46) que alberga conjunto de planchas (36, 38) conformadas y construidas en una sola pieza de acero en el que dos plancha (36) simétricos se instalan sobre el emparrillado (46) entre cada banda (32) y el extremo del robot (37) diferenciándose una zona central
(40) Y una zona de rebaje (41) o carril y una zona exterior (42) y porque un conjunto de planchas (38) de una sola pieza se instalan sobre el emparrillado (46) entre las dos bandas pisables (32) en el que se diferencias una zona central (43) una zona de rebaje (44) de rodamiento de ruedas de vehículos y zona exterior (45) de protección,
• dos conjuntos motorizados (35) de carga y descarga de vehículos que comprende dos bandas pisables (32) independientes.
3. Instalación de estacionamiento automático según reivindicación 1 caracterizado porque el elevador (5) es accesible a los usuario y existe un robot (37) por cada nivel (4) y porque el elevador (5) incluye dos bandas pisables (14) ubicadas transversalmente, de plástico modular, con aberturas inferiores de tres centímetros y porque el robot (7) de distribución se caracteriza por incluir dos conjuntos motorizados (34) de carga y descarga de vehículos que comprende dos camas de rodillos (25) independientes.
4. Instalación de estacionamiento automático según reivindicación 1 caracterizado porque el elevador (5) no es accesible al público e incluye dos camas de rodillos motorizados ubicadas transversalmente y por existir un robot (7) en cada nivel, desplazable sobre unos raíles (10) estando constituido el robot distribuidor (7) por dos conjuntos motorizados (34) de carga y descarga de vehículos que comprende cada uno de ellos una cama de rodillos (25) independiente.
5. Instalación de estacionamiento automático según reivindicación 1 a 4 caracterizado porque cada planta del aparcamiento está construida en solera de hormigón y porque los raíles (10) están apoyados sobre losas de hormigón.
6. Instalación de estacionamiento automático según reivindicación 1 a 4 en caracterizado porque el aparcamiento está construido con estructura metálicas (48) y la rodadura del robot (7, 37) distribuidor se realiza apoyándose en perfiles (10) soldados a la propia estructura (48) .
7. Instalación de estacionamiento automático según reivindicación 1 a 4 caracterizado porque la instalación de aparcamiento está construida por una combinación de solera de hormigón y estructuras metálicas (48) y por
que los raíles (10) están soldados a la propia estructura (48) así como a las losas de hormigón.
8. Instalación de estacionamiento automático según reivindicación 1 a 4 caracterizado porque el elevador (5) presenta dos embarques longitudinales de desplazamiento del robot (7, 37) Y dos embarques transversales de vehículos constituido por una pareja de bandas de pisables (14) motorizadas o camas de rodillos motorizados.
9. Instalación de estacionamiento automático según reivindicación 1 a 4 caracterizado porque la transmisión de energía al robot (7, 37) se realiza a través de un carril continuo con los contactos abiertos y un patín tomacorriente desplazable a los largo del carril.
10. Dispositivo automático para el transporte de vehículos o robot (7, 37) en aparcamientos automatizados de varios niveles (4) con una o varias zonas
(3) de recogida y entrega de vehículos, elevador industrial, raíles (10) en cada planta (4) y plazas (9) basadas en camas de rodillos (47) , caracterizado por estar constituido por:
i. un bastidor (18) de tubo estructural atornillado,
ii. cuatro conjuntos de tres ruedas (21, 20, 21) instaladas en soportes (33) en forma de "T" en cada uno de los extremos del larguero (26) del bastidor y dispuestos de manera longitudinal, incluyendo las tres ruedas (21, 20, 21) llanta metálica y recubiertas de Vulkollan dispuestas de manera equidistante, estando la rueda motriz central (20) acoplada a través de un acoplamiento tipo flexible (22) a un conjunto motriz (19) compuesto por un motor y un reductor asíncrono y siendo las otras dos ruedas del tipo loca (21) Y realizándose la unión del soporte "T" (33) al bastidor (18) mediante bulones (29) de acero,
iii. dos conjunto de tres ruedas locas (22) instaladas en soportes (33) en forma de 'T' ubicados en la parte central de cada uno de los largueros (26) del bastidor (18) , y dispuestas de manera longitudinal al bastidor (18) realizándose la unión del soporte "T" (33) al bastidor (18) del robot (7, 37) mediante bulones (29) de acero,
IV. dos conjuntos motorizados de carga y descarga de vehículos montados cada uno sobre el bastidor (18) y ubicados entre el conjunto de ruedas locas (24) y el conjunto motriz (20, 21) , acoplándose cada conjunto motorizado a través de una acoplamiento flexible (22) al conjunto motriz (34, 35) compuesto por un motor y un reductor,
v. un lector de código de barras (27) ubicado en la parte inferior de un larguero (26) del bastidor (18) ,
vi. cuatro rueda locas (23) instaladas transversalmente en cada uno los extremos de los dos largueros (26) del bastidor (18) ,
vii. un dispositivo de transmisión (28) de datos tipo infrarrojo ubicado junto a una de las ruedas locas (23) en uno de los extremos del larguero (26) del bastidor el bastidor (18) ,
viii. sensores ultrasónicos ubicados en el bastidor (18) ,
ix. cuadros eléctricos (31) , tanto de fuerza como de control, así como sensores.
11. Dispositivo automático para el transporte de vehículos o robot (7) en aparcamientos automatizados de varios niveles (4) según reivindicación 10 caracterizado porque cada uno de los dos conjuntos motorizados independientes de carga y descarga de vehículos está constituidos por un conjunto de camas de rodillos (25) .
12. Dispositivo automático para el transporte de vehículos o robot (37) en aparcamientos automatizados de varias plantas (4) según reivindicación 10 caracterizado porque cada uno de los dos conjuntos motorizados independientes de carga y descarga de vehículos están constituidos por un par de bandas pisables (32) de plástico modular, con aperturas modulares de 3 centímetros así como porque sobre el bastidor (4) se incluye un emparrillado (46) que soporta un conjunto de planchas (36, 38) conformadas y construidas en una sola pieza de acero en el que dos
planchas (36) simétricas se instalan sobre el emparrillado (46) entre cada banda (32) y el extremo del robot (37) diferenciándose una zona central (40) y una zona de rebaje (41) o carril y una zona exterior (42) y porque un conjunto de planchas (38) de una sola pieza se instalan sobre el emparrillado (46) entre las dos bandas pisables (32) en el que se diferencias una zona central (43) una zona de rebaje (44) do carril y zona exterior (45) de protección.
13. Procedimiento de aparcamiento en una instalación de aparcamiento automatizada según los dispositivos y elementos expuestos en las anteriores reivindicaciones en el que una vez que el usuario entra con su vehículo en el aparcamiento se realizan las siguiente etapas:
• etapa de entrada del vehículo,
• etapa de traslado del vehículo a una plaza (9) del silo,
• etapa de retirada del vehículo y salida del aparcamiento
• etapa de recogida de objetos del vehículo
caracterizado porque la etapa de entrada del vehículo incluye los siguientes pasos:
• identificación del usuario con una tarjeta,
• deposito del vehículo en la zona de transferencia (3) con la ayuda de las indicaciones del sistema,
• medición y comprobación dimensiones y peso del vehículo así como del correcto posicionamiento en la zona de transferencia (3) del vehículo,
• comprobación de maniobras realizadas y abandono del usuario de la zona de transferencia, en donde la comprobación de maniobras de entrada se realiza usando una validadora compuesta por una pantalla táctil HMI, de comunicación, y un lector de tarjetas, concluyendo la validación y secuencia de entrada con la introducción de la tarjeta del usuario y porque para que el sistema finalice el procedimiento de entrada el usuario debe contestar correctamente a todas las preguntas,
y porque en la maniobra de traslado del vehículo de la zona de transferencia (3) a una plaza (9) incluye las siguientes etapas:
• cierre de las puertas de acceso (12, 13) a la zona de transferencia (3) ,
• deposito del vehículo sobre el elevador (5) y traslado del elevador (59)
al nivel (4) asignado por el sistema, realizándose el giro de
posicionamiento del vehículo en el elevador (5) con la ayuda de un
mecanismo de giro (54) ubicado entre la cabina (51) del elevador (5) y
la plataforma (52) realizándose el giro en la zona de transferencia (3) o
en cada nivel (4) ,
• transferencia del vehículo entre el elevador (5) y el robot (7, 37) a
través de una pareja de bandas pisables (14) o camas de rodillos
movidos cada uno de ellos por un solo conjunto motriz y una pareja de
camas de rodillos (25) o bandas pisables (32) del robot (7, 37) movidos
cada una de las camas (25) o bandas (32) por un conjunto motriz (34,
35) ,
• traslado del robot (7, 37) con el vehículo a la plaza (9) asignada sobre
unos raíles (10) , de perfil metálico que incluye una banda plástica
continua en el que se inserta de manera consecutiva y sin
discontinuidad grupos diferenciados de código de barras (50) ,
estableciéndose la posición del robot en la vía (10) por la lectura de al
menos 3 códigos de barras (50) consecutivos siendo la comunicación
entre el robot y el sistema tipo emisor receptor infrarrojos con el
receptor fijo en un extremo de un rail (10) y el emisor (28) móvil
instalado en el bastidor del robot (7, 37) ,
• y la transferencia del vehículo entre el robot (7, 37) Y la plaza (9) se
realiza a través de una pareja de camas de rodillos (47) de la plaza (9)
acopladas cada una de ellas con acoplamiento tipo flexible a un solo
conjunto motriz (11) y una pareja de camas de rodillos (25) o bandas
pisables (32) del robot (7, 37) movidos cada una de las camas (25) o
bandas (32) por un conjunto motriz (34, 35) ,
y porque la etapa de retirada del vehículo y salida del aparcamiento una vez que accede el usuario al aparcamiento incluye las siguientes etapas:
• identificación del usuario en la validadora a través de una tarjeta por el lector de tarjetas,
• elección del usuario de recogida del vehículo en la validadora,
• traslado del vehículo desde la plaza (9) a la zona de transferencia (3) , a través de los siguientes pasos: transferencia del vehículo de manera automatizada de la plaza (9) al robot (7, 37) , traslado del robot (7, 37, ) a lo largo de los raíles (10) hasta posicionarse frente al elevador (5) , transferencia del vehículo del robot (7, 37) al elevador (5) , traslado del elevador desde el nivel (4) hasta la zona de transferencia (3) y posicionamiento del vehículo encarado a la salida
(12) de la zona de transferencia (3) ,
y porque la etapa de recogida de objetos del vehículo incluye las siguientes etapas:
• identificación del usuario en la validadora a través de una tarjeta por el lector de tarjetas,
• elección del usuario de recogida de objetos en la validadora,
• traslado del vehículo desde la plaza (9) a la zona de transferencia (3) , a través de los siguientes pasos: transferencia del vehículo de manera automatizada de la plaza (9) al robot (7, 37) , traslado del robot (7, 37, ) a lo largo de los raíles (10) hasta posicionarse frente al elevador (5) , transferencia del vehículo del robot (7, 37) al elevador (5) , traslado del elevador desde el nivel (4) hasta la zona de transferencia (3) y posicionamiento del vehículo encarado en dirección opuesta a la salida (12) de la zona de transferencia (3)
Y porque todas las maniobras se controlan a través de electrónica basada en autómatas programables (PLC) que recogen las señales de la sensorización que se encuentra distribuida por el aparcamiento siendo los sensores de tipo células fotoeléctricas ubicadas en las plazas del aparcamiento y en las bandas ables, sensores ultrasónicos ubicados en el bastidor (18) del robot (7, 37) Y del elevador (5) del tipo emisor-receptor o reflexión, limitadores de recorrido ubicados en las plazas (9) , en los raíles (10) Y en los robots (7, 37) , los detectores volumétricos se ubican en las zonas de transferencia (3) y porque las comunicaciones entre los autómatas y los diferentes sensores se realizan punto a punto entre el sensor y las bornas de entrada de señales o mediante buses de campo y utilizando un protocolo de comunicaciones tipo Profibus estando el sistema de transmisión de datos por infrarrojo del robot (7, 37) constituido por un emisor instalado en el bastidor (18) del robot y un receptor
de señal fijo ubicado en uno de los extremos del carril (10) .
Figura 1
12
Figura 2
Figura 3
Figura 4
:!I
ce;
U1
Figura 6
C\I
m
, ....
~------------, ....
C\I
o
, ....
, ....
C\I
C\I
C\I
41 31 33 26 46 35 32 40
TI
(C
e
-, 1»
-....J
I
41 24 45 44 43 21
Figura 8
Figura 9
Figura 10
1IIIIlltllllllllll···
Patentes similares o relacionadas:
Chasis de transferencia de vehículos para sistemas de aparcamiento mecánicos, del 1 de Julio de 2020, de Sotefin Patents SA: Un chasis de transferencia de vehículos para sistemas mecánicos automáticos de aparcamiento que comprende: - al menos un bastidor ; - medios de manipulación […]
Dispositivo de recubrimiento para tanque tal como una piscina o similar, del 26 de Octubre de 2018, de Groupe Waterair: Dispositivo de recubrimiento para un tanque, en particular una piscina o similar, que comprende un módulo de seguridad y un módulo funcional complementario dispuestos […]
Instalación de aparcamiento automática, del 4 de Enero de 2017, de OTTO WOHR GMBH: Instalación de aparcamiento automática que comprende una pluralidad de plazas de estacionamiento para vehículos, dispuestas unas al lado y/o encima de otras, […]
 INSTALACIÓN ROBOTIZADA DE ESTACIONAMIENTO DE VEHÍCULOS CON VARIOS TIPOS DE PLAZAS DE GARAJE Y CONTROL DE ADELANTAMIENTO EN LAS PLAZAS, del 7 de Mayo de 2015, de ROBOTICA Y MECANIZADOS, S.L: Instalación robotizada de estacionamiento de vehículos de uno o varios niveles cuya zona de deposito que comprende un conjunto de plazas y carriles por los que se desplaza […]
INSTALACIÓN ROBOTIZADA DE ESTACIONAMIENTO DE VEHÍCULOS CON VARIOS TIPOS DE PLAZAS DE GARAJE Y CONTROL DE ADELANTAMIENTO EN LAS PLAZAS, del 7 de Mayo de 2015, de ROBOTICA Y MECANIZADOS, S.L: Instalación robotizada de estacionamiento de vehículos de uno o varios niveles cuya zona de deposito que comprende un conjunto de plazas y carriles por los que se desplaza […]
Aparcamiento automático con plataformas móviles, del 28 de Mayo de 2014, de Montagni, Claudio: Aparcamiento de coches automático para alojar de manera ordenada una pluralidad de vehículos de motor, que comprende plataformas móviles […]
 PARKING ROBOTIZADO, del 19 de Abril de 2012, de LOYZAGA GAITANO, FRANCISCO: Especialmente concebido para permitir almacenar vehículos de forma automatizada, si bien es aplicable en otras instalaciones, todo ello merced a una estructuración que permite […]
PARKING ROBOTIZADO, del 19 de Abril de 2012, de LOYZAGA GAITANO, FRANCISCO: Especialmente concebido para permitir almacenar vehículos de forma automatizada, si bien es aplicable en otras instalaciones, todo ello merced a una estructuración que permite […]
DISPOSITIVO PARA APARCAR Y RECUPERAR UN VEHICULO., del 16 de Mayo de 2004, de DESIGNER & LICENSEE OF PRODUCTS AND PROJECT, INC.: LA INVENCION INCLUYE UN DISPOSITIVO PARA APARCAR VEHICULOS DESDE UNA POSICION DE ENTRADA/SALIDA, DONDE EL DISPOSITIVO ESTA PROVISTO DE MEDIOS DE ELEVACION DESPLAZABLES […]
 NUEVA INSTALACIÓN DE ALMACENAMIENTO DE OBJETOS, PRODUCTOS Y ARTÍCULOS DIVERSOS, PRINCIPALMENTE VEHÍCULOS AUTOMÓVILES, del 1 de Marzo de 1960, de EBSTEIN, SIMON: Perfeccionamientos en cojinetes corrientes, caracterizados por comprender un elemento de apoyo de una superficie anular de apoyo prácticamente de forma esférica […]
NUEVA INSTALACIÓN DE ALMACENAMIENTO DE OBJETOS, PRODUCTOS Y ARTÍCULOS DIVERSOS, PRINCIPALMENTE VEHÍCULOS AUTOMÓVILES, del 1 de Marzo de 1960, de EBSTEIN, SIMON: Perfeccionamientos en cojinetes corrientes, caracterizados por comprender un elemento de apoyo de una superficie anular de apoyo prácticamente de forma esférica […]