MÉTODO PARA INDUCIR UN BLOQUE CANDIDATO DE FUSIÓN Y DISPOSITIVO QUE USA EL MISMO.
Método para inducir un bloque candidato de fusión y dispositivo que usa el mismo.
La presente invención se refiere a un método para inducir un bloque candidato de fusión y a un dispositivo que usa el mismo. Un método de descodificación de imágenes comporta la descodificación de información en relación con la región de estimación de movimiento (MER); la determinación de si un bloque objetivo predicho y un bloque candidato de fusión espacial están incluidos o no en la misma MER; y la determinación de que el bloque candidato de fusión espacial es un bloque candidato de fusión no disponible cuando el bloque objetivo predicho y el bloque candidato de fusión espacial están incluidos en la misma MER. Por consiguiente, mediante la realización en paralelo del método para inducir un candidato de fusión, se habilita un procesamiento en paralelo y se reducen la cantidad de cálculo y la complejidad de implementación.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/KR2012/007176.
Solicitante: KT Corporation.
Nacionalidad solicitante: República de Corea.
Dirección: 90 Buljeong-ro, Bundang-gu Seongnam-city 463-711 Kyeonggi-do REPUBLICA DE COREA.
Inventor/es: KWON,Jae Cheol, KIM,Joo Young, LEE,Bae Keun.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04N7/26
- H04N7/32
Fragmento de la descripción:
Método para inducir un bloque candidato de fusión y dispositivo que usa el mismo Campo de la técnica
La presente invención se refiere a un método de codificación y descodificación de vídeo y, más en particular, a un método de obtención de un bloque candidato de fusión y a un aparato que usa el mismo.
Técnica anterior
Recientemente, la demanda para un vídeo con una alta resolución y una alta calidad tal como un vídeo de alta definición (HD, high deünition) y un vídeo de alta ultra definición (UHD, ultra high deUnition) se ha visto aumentada en diversos campos de aplicación. A medida que la resolución y la calidad de vídeo se vuelven más altas, la cantidad de vídeo aumenta de forma relativa en comparación con un vídeo existente y, por lo tanto, en un caso en el que, cuando el vídeo se transmite usando un medio tal como una red de banda ancha inalámbrica o un hilo existente o se almacena en un medio de almacenamiento existente, el coste de transmisión y el coste de almacenamiento se aumentarían. Con el fin de resolver estos problemas que se generan a medida que la resolución y la calidad se están haciendo más altas, pueden utilizarse técnicas de compresión de vídeo de alta eficiencia.
Las técnicas de compresión de vídeo incluyen diversas técnicas, tal como una técnica de Ínter predicción (de imagen) para predecir un valor de píxel incluido en una imagen actual a partir de una imagen de antes o de después de la imagen actual, una técnica de intra predicción (de imagen) para predecir el valor de píxel incluido en una imagen actual mediante el uso de información de píxeles dentro de la imagen actual, y una técnica de codificación con entropía para asignar un código más corto a un valor de frecuencia de alta aparición y asignar un código más largo aun valor de frecuencia de baja aparición, y los datos de vídeo pueden comprimirse de forma efectiva para transmitirse o almacenarse mediante el uso de tal técnica de compresión de vídeo.
Divulgación
Problema técnico
El primer fin de la presente invención es la provisión de un método de obtención de un candidato de fusión con un procesamiento en paralelo.
El segundo fin de la presente Invención es la provisión de un aparato para realizar un método de obtención de un candidato de fusión con un procesamiento en paralelo.
Solución técnica
De acuerdo con un aspecto de la presente invención para conseguir el primer objetivo de la presente invención que se ha descrito en lo que antecede, se proporciona un método de obtención de un candidato de fusión. El método puede incluir la descodificación de infomnadón en relación con la región de estimación de movimiento (MER); la determinación de si un bloque objeto de predicción y un bloque candidato de fusión espacial están Incluidos en la misma MER; y decidir que el bloque candidato de fusión espacial es un bloque candidato de fusión no disponible si se está determinando un bloque candidato de fusión que no usa el bloque candidato de fusión espacial cuando el bloque objeto de predicción y el bloque candidato de fusión espacial están incluidos en la misma MER. El método puede incluir además la determinación de fomna adaptiva de un bloque candidato de fusión espacial de acuerdo oon el tamaño de la MER y el tamaño del bloque objeto de predicción si el bloque objeto de predicción y el bloque candidato de fusión espacial están incluidos en la misma MER. Si el tamaño de la MER es 8 x8 y el tamaño del bloque objeto de predicción es8x4o4x8, por lo menos uno de los bloques candidatos de fusión espacial del bloque objeto de predicción puede sustituirse con un bloque que incluye un punto que se encuentra en el exterior de la MER. El método puede incluir además la determinación de si el bloque candidato de fusión espacial está incluido en una MER que no se ha descodificado aún. El método puede incluir además la sustitución del bloque candidato de fusión espacial con un bloque incluido en otra MER si el bloque objeto de predicción yel bloque candidato de fusión espacial están incluidos en la misma MER. El bloque candidato de fusión espacial sustituido puede ser un bloque candidato de fusión espacial que se sustituye de forma adaptiva para incluirse en una MER diferente del bloque objeto de predicción de acuerdo con una ubicación del bloque candidato de fusión espacial incluido en la misma MER. La información en relación con la MER puede ser información en relación con el tamaño de la MER y transmitirse en una unidad de una imagen. La determinación de si el bloque objeto de predicción yel bloque candidato de fusión espacial están incluidos en la misma MER puede incluir la determinación de si el bloque objeto de predicción yel bloque candidato de fusión espacial están incluidos en la misma MER de acuerdo con una ecuación de determinación basada en información de ubicación del bloque objeto de predicción, información de ubicación del bloque candidato de fusión espacial, e información de tamaño de la MER.
De acuerdo con otro aspecto de la presente invención para conseguir el segundo objetivo de la presente invención que se ha descrito en lo que antecede, se proporciona un aparato de descodificación de imágenes. El aparato puede Incluir una unidad de descodificación de entropía para descodificar información en relación con la región de estimación de movimiento (MER) y una unidad de predicción para detemninarsi un bloque objeto de
predicción y un bloque candidato de fusión espacial están incluidos en la misma MER y la decisión del bloque candidato de fusión espacial como un bloque candidato de fusión no disponible si el bloque objeto de predicción y el bloque candidato de fusión espacial están incluidos en la misma MER. La unidad de predicción puede ser una unidad de predicción que determina de forma adaptiva un bloque candidato de fusión espacial de acuerdo con el tamaño de la MER y el tamaño del bloque objeto de predicción si el bloque objeto de predicción y el bloque candidato de fusión espacial están incluidos en la misma MER. Si el tamaño de la MER es 8x8 y el tamaño del bloque objeto de predicción es 8 x4 o 4 x8, la unidad de predicción puede sustituir por lo menos uno de los bloques candidatos de fusión espacial del bloque objeto de predicción con un bloque que incluye un punto que se encuentra en el exterior de la MER. La unidad de predicción puede determinar si el bloque candidato de fusión espacial está incluido en una MER que se ha descodificado aún. La unidad de predicción puede ser una unidad de predicción que sustituye el bloque candidato de fusión espacial con un bloque incluido en otra MER cuando el bloque objeto de predicción y el bloque candidato de fusión espacial están incluidos en la misma MER. El bloque candidato de fusión espacial sustituido puede ser un bloque candidato de fusión espacial que se sustituye de forma adaptiva para incluirse en una MER diferente del bloque objeto de predicción de acuerdo con una ubicación del bloque candidato de fusión espacial incluido en la misma MER. La información en relación con la MER puede ser Información en relación con el tamaño de la MER, y transmitirse en una unidad de una imagen. La unidad de predicción puede ser una unidad de predicción que determina si el bloque objeto de predicción y el bloque candidato de fusión espacial están Incluidos en la misma MER basada en una ecuación de determinación de acuerdo con información de ubicación del bloque objeto de predicción, información de ubicación del bloque candidato de fusión espacial, e Información de tamaño de la MER.
Efectos ventajosos
De acuerdo con un método de obtención de un bloque candidato de fusión y un aparato que usa el mismo que se describe en realizaciones a modo de ejemplo de la presente invención, un procesamiento en paralelo puede conseguirse mediante la realización del método de obtención del bloque candidato de fusión en paralelo, por lo tanto, la calidad de cálculo y la complejidad de ¡mplementaclón pueden reducirse.
Descripción de los dibujos
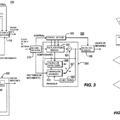
La figura 1 es un diagrama de bloques que ¡lustra un codificador de vídeo de acuerdo con una realización a modo de ejemplo de la presente Invención.
La figura 2 es un diagrama de bloques que ¡lustra un descodlflcador de vídeo de acuerdo con otra realización a modo de ejemplo de la presente invención.
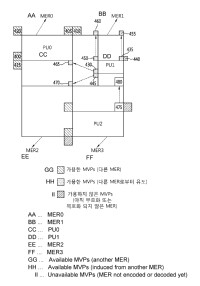
La figura 3 es una vista conceptual que ilustra bloques candidatos para aplicar un modo de fusión y un modo de omisión de acuerdo con una realización a modo de ejemplo de la presente invención.
La figura 4 es una vista conceptual que ilustra un método de decisión de un bloque candidato de fusión de acuerdo...
Reivindicaciones:
1. Un método de obtención de un candidato de fusión, comprendiendo el método: descodificar información en relación con la región de estimación de movimiento (MER);
determinar si un bloque objeto de predicción y un bloque candidato de fusión espacial están incluidos en la misma MER; y
decidir que el bloque candidato de fusión espacial es un bloque candidato de fusión no disponible si el bloque objeto de predicción y el bloque candidato de fusión espacial están incluidos en la misma MER.
2. El método de la reivindicación 1, que además comprende:
si el bloque objeto de predicción y el bloque candidato de fusión espacial están incluidos en la misma MER, decidir de forma adaptiva un bloque candidato de fusión espacial de acuerdo con el tamaño de la MER y el tamaño del bloque objeto de predicción.
3. El método de la reivindicación 2, en el que, si el tamaño de la MER es 8 x 8 y el tamaño del bloque objeto de predicción es 8 x4 o 4 x 8, por lo menos uno de los bloques candidatos de fusión espacial del bloque objeto de predicción se sustituye con un bloque que incluye un punto que se encuentra en el exterior de la MER.
4. El método de la reivindicación 1, que además comprende:
determinar si el bloque candidato de fusión espacial está incluido en una MER que no se ha des codificado aún.
5. El método de la reivindicación 1, que además comprende:
si el bloque objeto de predicción y el bloque candidato de fusión espacial están incluidos en la misma MER, sustituir el bloque candidato de fusión espacial con un bloque incluido en otra MER.
6. El método de la reivindicación 5, en el que el bloque candidato de fusión espacial sustituido es un bloque candidato de fusión espacial que se sustituye de forma adaptiva para incluirse en una MER diferente del bloque objeto de predicción de acuerdo con una ubicación del bloque candidato de fusión espacial Incluido en la misma MER.
7. El método de la reivindicación 1, en el que la información en relación con la MER es ¡nfoimadón en
relación con el tamaño de la MER, y se transmite en una unidad de imagen.
8. El método de la reivindicación 1, en el que la determinación de si el bloque objeto de predicción y el
bloque candidato de fusión espacial están incluidos en la misma MER es una etapa que determina si el bloque
objeto de predicción y el bloque candidato de fusión espacial están Incluidos en la misma MER de acuerdo con una ecuación de determinación basada en información de ubicación del bloque objeto de predicción, información de ubicación del bloque candidato de fusión espacial e información de tamaño de la MER.
9. Un aparato de descodificación de vídeo que comprende:
un módulo de descodificación de entropía para descodificar información en relación con la región de estimación de movimiento (MER): v
un módulo de predicción para determinar si un bloque objeto de predicción y un bloque candidato de fusión espacial están incluidos en la misma MER, y decidir que el bloque candidato de fusión espacial es un bloque candidato de fusión no disponible si el bloque objeto de predicción y el bloque candidato de fusión espacial están incluidos en la misma MER.
1. El aparato de descodificación de vídeo de la reivindicación 9, en el que el módulo de predicción decide de forma adaptiva un bloque candidato de fusión espacial de acuerdo con el tamaño de la MER y el tamaño del bloque objeto de predicción si el bloque objeto de predicción y el bloque candidato de fusión espacial están incluidos en la misma MER.
11. El aparato de descodificación de vídeo de la reivindicación 1, en el que, si el tamaño de la MER es 8 x8 y el tamaño del bloque objeto de predicción es 8 x4 o 4 x8, el módulo de predicción sustituye por lo menos uno de los bloques candidatos de fusión espacial del bloque objeto de predicción con un bloque que incluye un punto que se encuentra en el exterior de la MER.
12. El aparato de descodificación de vídeo de la reivindicación 9, en el que el módulo de predicción detemnina si el bloque candidato de fusión espacial está incluido en una MER que no se ha descodificado aún.
13. El aparato de descodificación de vídeo de la reivindicación 9, en el que, si el bloque objeto de predicción vel bloque candidato de fusión espacial están incluidos en la misma MER, el módulo de predicción sustituye el bloque candidato de fusión espacial con un bloque incluido en otra MER.
14. El aparato de descodificación de vídeo de la reivindicación 13, en el que el bloque candidato de fusión espacial sustituido es un bloque candidato de fusión espacial que se sustituye de forma adaptiva para incluirse en una MER diferente del bloque objeto de predicción de acuerdo con una ubicación del bloque candidato de
fusión espacial incluido en la misma MER.
15. El aparato de descodificación de vídeo de la reivindicación 9. en el aue la información en relación con la MER es información en relación con el tamaño de la MER, y se transmite en una unidad de imagen.
16. El aparato de descodificación de vídeo de la reivindicación 9, en el que el módulo de predicción determina si el bloque objeto de predicción y el bloque candidato de fusión espacial están incluidos en la misma MER de acuerdo con una ecuación de determinación basada en información de ubicación del bloque objeto de predicción, información de ubicación del bloque candidato de fusión espacial e información de tamaño de la
MER.
Patentes similares o relacionadas:
Sistema y método para codificación y decodificación aritmética, del 29 de Abril de 2020, de NTT DOCOMO, INC.: Método de decodificación aritmética para convertir una secuencia de información compuesta por una secuencia de bits en una secuencia de eventos binarios compuesta […]
 Filtro de desbloqueo condicionado por el brillo de los píxeles, del 25 de Marzo de 2020, de DOLBY INTERNATIONAL AB: Método para desbloquear datos de píxeles procesados con compresión de vídeo digital basado en bloque, incluyendo los pasos:
- recibir […]
Filtro de desbloqueo condicionado por el brillo de los píxeles, del 25 de Marzo de 2020, de DOLBY INTERNATIONAL AB: Método para desbloquear datos de píxeles procesados con compresión de vídeo digital basado en bloque, incluyendo los pasos:
- recibir […]
Método para codificar y descodificar imágenes B en modo directo, del 19 de Febrero de 2020, de Godo Kaisha IP Bridge 1: Un método para generar y descodificar una secuencia de bits de una imagen B objetivo, en donde generar la secuencia de bits de la imagen B objetivo incluye las siguientes […]
Interpolación mejorada de cuadros de compresión de vídeo, del 4 de Diciembre de 2019, de DOLBY LABORATORIES LICENSING CORPORATION: Un método para compresión de imágenes de video usando predicción en modo directo, que incluye: proporcionar una secuencia de cuadros predichos […]
Interpolación mejorada de cuadros de compresión de vídeo, del 4 de Diciembre de 2019, de DOLBY LABORATORIES LICENSING CORPORATION: Un método de compresión de imágenes de video que comprende: proporcionar una secuencia de cuadros referenciables (I, P) y predichos bidireccionales […]
Capa de sectores en códec de vídeo, del 27 de Noviembre de 2019, de Microsoft Technology Licensing, LLC: Un procedimiento de decodificación de vídeo e imágenes, que comprende: decodificar una imagen de un flujo de bits codificado que tiene una jerarquía […]
Transformación solapada condicional, del 20 de Noviembre de 2019, de Microsoft Technology Licensing, LLC: Un método para codificar un flujo de bits de vídeo utilizando una transformación solapada condicional, en donde el método comprende: la señalización de un modo de filtro […]
Técnica para una simulación del grano de película exacta de bits, del 4 de Septiembre de 2019, de InterDigital VC Holdings, Inc: Un procedimiento para simular un grano de película en un bloque de imagen que comprende: calcular el promedio de los valores de luminancia de píxeles dentro del bloque de […]