Sistema y procedimiento de implantoplastia guiada.
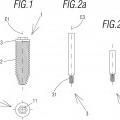
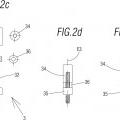
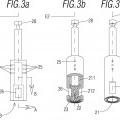
Sistema de implantoplastia guiada que comprende un cuerpo de fresado susceptible de rotar axialmente sobre su eje longitudinal,
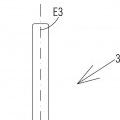
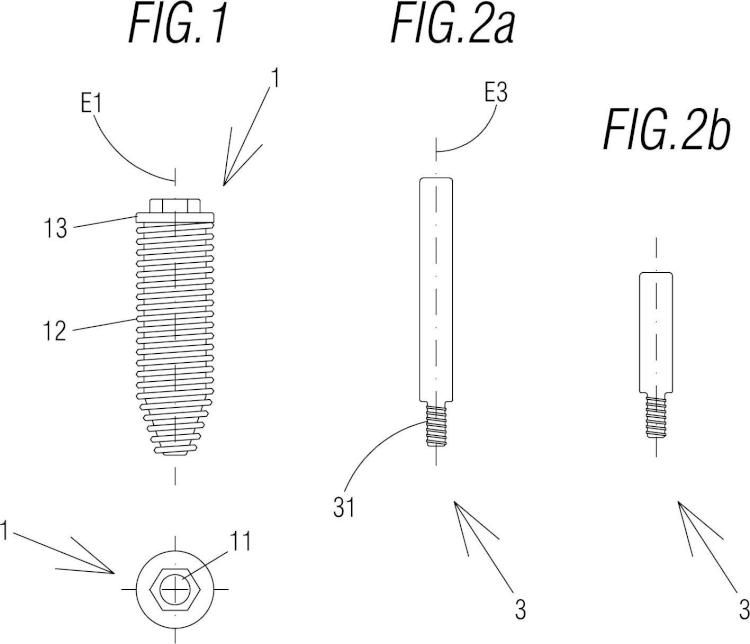
estando dotado el cuerpo de fresado con al menos una porción de desbaste; un cuerpo de guiado alargado susceptible de posicionarse longitudinalmente en y de sobresalir parcialmente del interior de un orificio de fijación protésica de un implante, el cuerpo de guiado comprendiendo unos medios de fijación vinculables al orificio de fijación protésica, en el que el cuerpo de fresado y el cuerpo de guiado están configurados de forma complementaria entre sí tal que se define una relación machihembrada entre ellos en una condición de uso; otro objeto de la invención se refiere a un procedimiento de implantoplastia guiada.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201531089.
Solicitante: TALÓN GRACIANI, Antonio.
Nacionalidad solicitante: España.
Inventor/es: TALÓN GRACIANI,Antonio, AVILÉS OSBORNE,Pablo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61C13/225 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61C TECNICA DENTAL; APARATOS O METODOS PARA HIGIENE ORAL O DENTAL (cepillos dentales no accionados mecánicamente A46B; preparaciones para la técnica dental A61K 6/00; preparaciones para la limpieza de los dientes o enjuagado de la boca A61K 8/00, A61Q 11/00). › A61C 13/00 Prótesis dentales; Su fabricación (coronas dentales para recubrir los dientes A61C 5/70; implantes dentales A61C 8/00). › Fijación de prótesis en la boca (fijación de las coronas dentales después de recubrir los dientes A61C 5/30).
PDF original: ES-2553678_A1.pdf
Patentes similares o relacionadas:
Modelado de la superestructura para una prótesis dental, del 19 de Junio de 2019, de 3SHAPE A/S: Método implementado por ordenador para obtener un modelo de una superestructura que une una prótesis dental y un arco dental correspondiente, […]
RETENCIÓN O ANCLAJE PARA IMPLANTES DENTALES, del 5 de Diciembre de 2017, de RAMÍREZ URRUTIA, Rafael: 1. Conjunto de retención para implantes dentales, de aquellos que comprenden una retención , que está destinada a fijarse al cuerpo del implante, y una cazoleta , que […]
DISPOSITIVO PRÓTESIS MANDIBULAR EN PACIENTES EDENTADOS Y MÉTODO ASOCIADO, del 26 de Mayo de 2017, de UNIVERSIDAD MAYOR: La presente invención corresponde a un dispositivo mandibular para pacientes edentados para resolver las limitaciones de las sobredentaduras y permitir […]
CONJUNTO DE IMPLANTE DENTAL Y COMPONENTES PROTÉSICOS, QUE INCLUYE UNA CAMISA TRANSEPITELIAL CON CONEXIÓN SUPERIOR ANTIRROTACIONAL, del 10 de Mayo de 2017, de BIOTECHNOLOGY INSTITUTE, I MAS D, S.L: Conjunto de implante dental y componentes protésicos, que comprende un implante dental , una camisa transepitelial , un primer tornillo , una pieza superior […]
ADITAMENTO DE ALTURA REGULABLE PARA PRÓTESIS DENTAL, del 8 de Mayo de 2017, de XAM-MAR MANGRANE,ESTEBAN: 1. Aditamento de altura regulable para prótesis dental del tipo que se conecta a un implante dental mediante un tornillo, caracterizado porque […]
PRÓTESIS DENTAL IMPLANTO-SOPORTADA, DISPOSITIVO REMOVEDOR AUTOMÁTICO DE LA PRÓTESIS, PIEZA DE SUJECIÓN DE LA PRÓTESIS A IMPLANTES Y BARRA DE FERULIZACIÓN DE IMPLANTES DE SUJECIÓN DE LA PRÓTESIS A IMPLANTES, del 24 de Noviembre de 2016, de MORALES ÁLVAREZ, José Carlos: Prótesis dental implanto-soportada, dispositivo removedor automático de la prótesis, pieza de sujeción de la prótesis a implantes y barra de sujeción de […]
Prótesis dental implanto-soportada, dispositivo removedor automático de la prótesis, pieza de sujeción de la prótesis a implantes y barra de ferulización de implantes de sujeción de la prótesis a implantes, del 21 de Noviembre de 2016, de MORALES ÁLVAREZ, José Carlos: Prótesis dental implanto-soportada, dispositivo removedor automático de la prótesis, pieza de sujeción de la prótesis a implantes y barra de sujeción de […]
Aditamento dental, del 24 de Octubre de 2016, de TERRATS TRIQUELL, Montserrat: 1. Aditamento dental configurado en uno de sus extremos para la conexión interna con un implante dental y para la fijación al mismo mediante un tornillo de […]