Herramientas de rastreo para cirugía de sustitución de hombro asistida por ordenador.
Un anclaje quirúrgico acoplable (50), para unir una diana rastreable (69) en relación fija a una escápula humana durante cirugía,
que comprende:
un cuerpo (52) que comprende un brazo de prolongación (62) y un brazo frontal (60), teniendo dicho cuerpo al menos dos perforaciones (54, 56) para alojar a los vástagos de tornillos óseos (100, 102), siendo al menos una de dichas perforaciones a través de dicho brazo de prolongación (62) y siendo otra de dichas perforaciones a través de dicho brazo frontal (60), dichas perforaciones dispuestas para dirigir dichos tornillos óseos al interior de una apófisis coracoides (18) fijando de este modo dicho cuerpo a la apófisis coracoides, dicho cuerpo dispuesto de modo que al menos dos de dichas perforaciones estén dispuestas en un ángulo convergente inferior o igual a 90°; y
un miembro de acoplamiento (66), portado por dicho cuerpo y dispuesto para engancharse con un miembro de acoplamiento complementario (70) que lleva una diana rastreable (69).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2005/038712.
Solicitante: KINAMED, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 820 FLYNN ROAD CAMARILLO, CA 93012-8701 ESTADOS UNIDOS DE AMERICA.
Inventor/es: PRATT,WILLIAM,RALPH, PILGERAM,KYLE CRAIG, SARIN,VINEET KUMAR, KENDALL,RICHARD LEE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/60 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para osteosíntesis externa, p. ej. aparatos estiradores o contractores.
PDF original: ES-2500341_T3.pdf
Fragmento de la descripción:
Herramientas de rastreo para cirugía de sustitución de hombro asistida por ordenador Antecedentes de la invención Campo de la invención
Esta invención se refiere a cirugía asistida por ordenador en general y, más específicamente, a cirugía de sustitución del hombro por articulación ortopédica.
Descripción de la técnica relacionada
La tecnología de rastreo asistido por ordenador se ha desarrollado y usado con éxito para muchos tipos de intervención quirúrgica. En cirugía ortopédica, la tecnología de rastreo asistido por ordenador (es decir navegación) se ha desarrollado para cirugía de cadera, rodilla y columna. Un sistema para navegación de cadera asistida por ordenador se describe en la Patente de Estados Unidos Número 6.711.431 de Sarin, et al., (marzo de 24). Otros informes de navegación quirúrgica asistida por ordenador están disponibles en la bibliografía médica y de patentes. El uso de tecnología de navegación en cirugía de hombro es mucho más reciente y está menos desarrollado. Una publicación describe la navegación en cirugía de artroplastia de hombro, pero esa divulgación está limitada a un método de orientación del implante humeral en el tratamiento de fracturas de hombro. Véase el documento Bicknell et al., "Computer-assisted Shoulder Hemiarthroplasty for fractures of the Proximal Humerus: an in vitro Comparison with Traditional Methods", Cuarta reunión anual de la International Computer Assisted Othopaedic Society, (Chicago 24) págs. 131 -132. La orientación del componente glenoideo no se abordó en esa publicación.
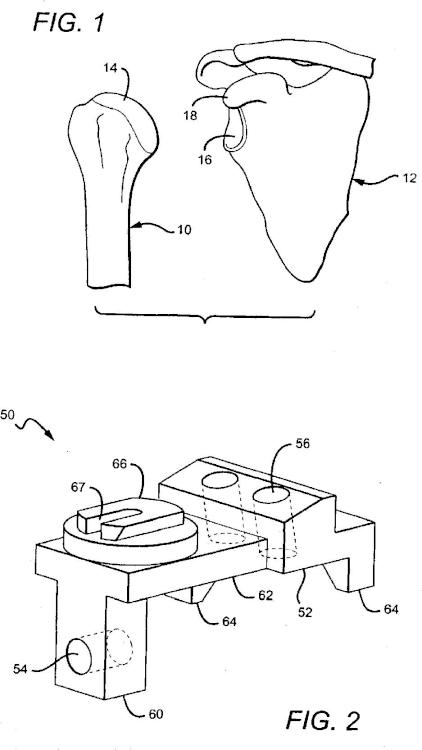
La figura 1 muestra la estructura esquelética de la articulación del hombro humano. Esta articulación permite al húmero 1 pivotar con respecto a la escápula 12. En cirugía de artroplastia de hombro total, tanto la cavidad glenoidea 14 como la cabeza del húmero 16 son sustituidas por implantes protésicos. La orientación espacial de estos implantes es un parámetro crítico que puede determinar el éxito quirúrgico y la longevidad del implante. El componente glenoideo, en particular, debe estar apropiadamente orientado con respecto a la escápula y a la cabeza del húmero para funcionar correctamente. Una de las principales metas intraoperatorias del cirujano de artroplastia de hombro es la consecución del correcto alineamiento y orientación del componente glenoideo.
La orientación del componente glenoideo se define en términos de dos mediciones angulares: los ángulos de inclinación y de versión. Ambos ángulos se definen con respecto a planos de la escápula. La inclinación se expresa en una proyección antero-posterior (desde la parte frontal a la posterior) de la escápula mientras que la versión se expresa en una proyección axilar (desde la parte superior a la inferior). Tanto la inclinación como la versión del componente glenoideo son determinadas habitualmente por el cirujano usando instrumentos manuales que preparan a la cavidad glenoidea nativa para la implantación. Normalmente, el cirujano usa señales visuales y la experiencia para determinar la orientación final del componente glenoideo. Como en cirugía de sustitución de cadera, dichos métodos no son robustos y frecuentemente dan como resultado orientaciones por debajo del óptimo. Se espera que el uso de navegación en cirugía de sustitución de hombro proporcione un beneficio clínico significativo, particularmente debido a la orientación mejorada del componente glenoideo.
Se han desarrollado dispositivos y software de rastreo automatizado que pueden ayudar a rastrear y medir huesos individuales en tiempo real durante la cirugía, tal como se describe en la patente de Sarin mencionada anteriormente y en otras partes. Sin embargo, existe una necesidad de dispositivos y métodos específicos para aplicar dichas técnicas de rastreo a cirugía de sustitución de hombro.
El documento US 6 491 699 B 1 desvela un método y un sistema para alinear un instrumento de guía quirúrgico sobre una trepanación en el cuerpo de un paciente, y en particular una unidad de guiado de instrumentos independiente que puede fijarse al cráneo de un paciente. Los ajustes de un instrumento quirúrgico pueden realizarse en direcciones x, y, z y angular. La unidad de guía de instrumentos incluye una guía de instrumentos para guiar a un instrumento quirúrgico al interior del cuerpo de un paciente y una unidad de base operativa para fijarse al cuerpo en una zona en la que se debe producir la cirugía. La unidad de base está acoplada a la guía de instrumentos. Un mecanismo de ajuste, acoplado a la unidad de base y la guía de instrumentos, es operativo para ajustar la guía de instrumentos en direcciones laterales con respecto a la superficie de la zona. El movimiento posicional del instrumento quirúrgico en la dirección z puede rastrearse detectando la ubicación de un transductor acoplado al instrumento quirúrgico.
El documento US 24/17244 A1 desvela un instrumento quirúrgico para uso con una estructura anatómica. El instrumento quirúrgico puede ser rastreado mediante un sistema de navegación quirúrgica para guiar la colocación del instrumento quirúrgico.
Sumario de la invención
De acuerdo con un aspecto, la presente invención es un anclaje quirúrgico acoplable, de acuerdo con la reivindicación 1. El cuerpo del anclaje es adecuado para montarse sobre la apófisis coracoides de la escápula humana.
Éstas y otras características y ventajas de la invención serán evidentes para los expertos en la materia a partir de la siguiente descripción detallada de realizaciones preferidas, tomada junto con los dibujos adjuntos, en los que:
Breve descripción de los dibujos
La figura 1 es una vista en perspectiva en despiece ordenado de una articulación de hombro humana, que ilustra la región anatómica en la que se empleará la invención;
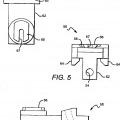
La figura 2 es una vista en perspectiva de un dispositivo de anclaje de acuerdo con la invención, adecuado para montar una diana rastreable en la apófisis coracoides de la escápula;
La figura 3 es una vista en planta del anclaje de la figura 2;
La figura 4 es una vista en alzado lateral del anclaje de la figura 2;
La figura 5 es una vista en alzado desde el extremo del anclaje de la figura 2;
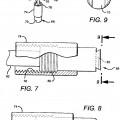
La figura 6 es una vista en perspectiva de un marcador rastreable montado sobre un miembro de acoplamiento, adecuado para acoplarse al anclaje de la figura 2;
La figura 7 es una vista en alzado lateral del miembro de acoplamiento en la figura 6;
La figura 8 es otra vista lateral del miembro de acoplamiento de la figura 7, girado noventa grados;
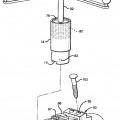
La figura 9 es una vista en planta desde abajo del miembro de acoplamiento de las figuras 7 y 8; y La figura 1 es una vista en perspectiva en despiece ordenado que muestra el anclaje, tornillos de montaje, diana rastreable y miembros de acoplamiento con respecto a una apófisis coracoides, que ilustra un método de fijación del anclaje y la diana rastreable a la apófisis coracoides para rastrear una escápula humana durante cirugía de sustitución de hombro.
Descripción detallada de la invención
Dado que el tronco de un paciente puede moverse durante la cirugía y, dado que la escápula puede moverse con respecto a los demás huesos en el cuerpo, es deseable rastrear la escápula en tiempo real durante la cirugía de sustitución de hombro con navegación. Para facilitar dicho rastreo, se requiere que una diana rastreable esté montada en la escápula.
La fijación de una diana rastreable a la escápula representa un desafío. La mayor parte del hueso escapular es fino y frágil, especialmente el cuerpo plano y el acromion. La unión de un dispositivo de rastreo a estas partes de la escápula usando una abrazadera o un tornillo óseo no es, por lo tanto, aconsejable. La apófisis coracoides (18 en la figura 1), sin embargo, es una estructura resistente que es fácilmente accesible al cirujano durante artroplastia de hombro.
En un aspecto, la invención es un anclaje adecuado para unir una diana rastreable a la apófisis coracoides, para rastrear la escápula durante cirugía de sustitución de hombro.
La figura 2 muestra un anclaje de acuerdo con la invención, identificado generalmente como 5. El anclaje 5 incluye un cuerpo 52 que tiene al menos dos perforaciones 54, 56 (y opcionalmente más) y un miembro de acoplamiento 66. El cuerpo 52 tiene adecuadamente forma de L, teniendo un brazo frontal 6 y un brazo de prolongación 62 tal como se muestra. Una perforación es a través del brazo frontal 6 del anclaje. Una o más perforaciones adicionales están provistas adecuadamente a través del brazo de prolongación 62. Preferentemente, las perforaciones están situadas de manera desplazada o escalonada, de... [Seguir leyendo]
Reivindicaciones:
1. Un anclaje quirúrgico acoplable (5), para unir una diana rastreable (69) en relación fija a una escápula humana durante cirugía, que comprende:
un cuerpo (52) que comprende un brazo de prolongación (62) y un brazo frontal (6), teniendo dicho cuerpo al menos dos perforaciones (54, 56) para alojar a los vástagos de tornillos óseos (1, 12), siendo al menos una de dichas perforaciones a través de dicho brazo de prolongación (62) y siendo otra de dichas perforaciones a través de dicho brazo frontal (6), dichas perforaciones dispuestas para dirigir dichos tornillos óseos al interior de una apófisis coracoides (18) fijando de este modo dicho cuerpo a la apófisis coracoides, dicho cuerpo dispuesto de modo que al menos dos de dichas perforaciones estén dispuestas en un ángulo convergente inferior o igual a 9°; y
un miembro de acoplamiento (66), portado por dicho cuerpo y dispuesto para engancharse con un miembro de acoplamiento complementario (7) que lleva una diana rastreable (69).
2. El anclaje quirúrgico de la reivindicación 1, en el que dichas al menos dos perforaciones (54, 56) tienen ejes dispuestos en una configuración escalonada para impedir interferencia entre dichos tornillos óseos (1, 12).
3. El anclaje quirúrgico de la reivindicación 1, en el que dicho cuerpo (52) tiene al menos tres protuberancias (64) adaptadas para entrar en contacto con una superficie ósea, dichas protuberancias dispuestas para facilitar el enganche firme de dicho anclaje a dicha superficie ósea cuando dicho anclaje está fijado a dicho hueso.
4. El anclaje quirúrgico de la reivindicación 1, en el que dicho miembro de acoplamiento (66) está adaptado para engancharse con un miembro complementario (7) en una relación predeterminada y repetible.
5. El anclaje quirúrgico de la reivindicación 1, en el que dicho miembro de acoplamiento (66) comprende un miembro de una ensambladura en cola de milano.
6. El anclaje quirúrgico de la reivindicación 1, en el que dicho miembro de acoplamiento (66) está adaptado para acoplarse a un miembro de acoplamiento complementario (7) en una posición de autocentrado.
7. El anclaje quirúrgico de la reivindicación 1, en el que dicho miembro de acoplamiento (66) está forzado para acoplarse en una posición que tiene una relación geométrica definida con su miembro complementario (7).
8. El anclaje quirúrgico de la reivindicación 1, en el que dicho cuerpo (52) tiene un tamaño y una forma que permiten que dicho cuerpo se enganche a una apófisis coracoides humana.
9. El anclaje quirúrgico de la reivindicación 1, adecuado para montar una diana rastreable (69) mediante dicho miembro de acoplamiento complementario (7) y capaz de engancharse a dicho miembro de acoplamiento (66), para montar dicha diana rastreable en dicho cuerpo de anclaje (52).
Patentes similares o relacionadas:
Brazo accionador desmontable para dispositivos de distracción, del 5 de Junio de 2019, de KLS-Martin, L.P: Un brazo accionador desmontable en combinación con un dispositivo distractor que comprende: un dispositivo distractor que comprende un cuerpo […]
Dispositivo de control de carga de unión articulada con fijación ósea, del 19 de Diciembre de 2018, de MOXIMED, INC.: Un aparato para controlar la carga en el cartílago articular de una articulación humana o animal que comprende: un primer ensamble de fijación para […]
Fijador externo, del 23 de Mayo de 2018, de Akeso AG: Un fijador externo para fijar segmentos de hueso en una construcción que comprende un armazón y una pluralidad de agujas de hueso , en donde el armazón consiste […]
DISPOSITIVO PARA EL TRATAMIENTO DE FRACTURAS COSTALES, del 26 de Mayo de 2016, de JMBORRO SL: Dispositivo para el tratamiento de fracturas costales que comprende al menos dos bridas , cada brida con el extremo en forma de hilo y un anclaje […]
 Dispositivo quirúrgico de distracción, del 24 de Febrero de 2016, de UNIVERSITY COLLEGE LONDON: Un dispositivo quirúrgico de distracción para aplicar una fuerza de extensión o tensión de forma no invasiva al esqueleto de un paciente o a un […]
Dispositivo quirúrgico de distracción, del 24 de Febrero de 2016, de UNIVERSITY COLLEGE LONDON: Un dispositivo quirúrgico de distracción para aplicar una fuerza de extensión o tensión de forma no invasiva al esqueleto de un paciente o a un […]
 Casquillo de bloqueo para un dispositivo de osteosíntesis y dispositivo de osteosíntesis que comprende dicho casquillo, del 10 de Febrero de 2016, de Worcel, Alexandre: Casquillo de bloqueo para una grapa fileteada de sujeción destinado a ser atornillado en una pieza ósea emprendiendo dicho casquillo una primera […]
Casquillo de bloqueo para un dispositivo de osteosíntesis y dispositivo de osteosíntesis que comprende dicho casquillo, del 10 de Febrero de 2016, de Worcel, Alexandre: Casquillo de bloqueo para una grapa fileteada de sujeción destinado a ser atornillado en una pieza ósea emprendiendo dicho casquillo una primera […]
Dispositivo de extensión, del 9 de Abril de 2014, de MAQUET GmbH: Un dispositivo de extensión, que comprende una superficie de soporte para el paciente y una barra de extensión , que puede unirse en uno de sus extremos […]
 DISPOSITIVO DE BLOQUEO DE UN CLAVO DE OSTEOSINTESIS EN UNA PIEZA OSEA, del 23 de Abril de 2010, de DONGAR, CHRISTIAN
WORCEL, ALEXANDRE: Dispositivo de bloqueo con relación a un elemento fijo de un clavo de sujeción fileteado atornillado en una perforación de eje (yy'') de una pieza […]
DISPOSITIVO DE BLOQUEO DE UN CLAVO DE OSTEOSINTESIS EN UNA PIEZA OSEA, del 23 de Abril de 2010, de DONGAR, CHRISTIAN
WORCEL, ALEXANDRE: Dispositivo de bloqueo con relación a un elemento fijo de un clavo de sujeción fileteado atornillado en una perforación de eje (yy'') de una pieza […]