Una herramienta flexible.
Una herramienta flexible (10), que comprende:
una pluralidad de segmentos interconectados movibles relacionados entre sí;
y
medios rígidos, que comprenden un medio (28) el cual llena las áreas entre los elementos de la articulación (18a-d, 20) de los segmentos;
en donde el medio (28) es conmutable durante el uso a partir de un primer estado de rigidez relativamente baja en donde el medio (28) se comporta como un fluido hacia un segundo estado de rigidez relativamente alta en donde el medio (28) es rígido y subsecuentemente conmutable a partir del segundo estado de regreso al primer estado;
y en donde el medio (28) actúa en el primer estado para fluir a través de las áreas para permitir el movimiento relativo entre los segmentos y el medio (28) actúa en el segundo estado para cerrar los elementos de la articulación (18a-d, 20) entre los segmentos y prevenir el movimiento relativo entre los segmentos.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11179839.
Solicitante: ROLLS-ROYCE PLC.
Nacionalidad solicitante: Reino Unido.
Dirección: 62 Buckingham Gate London SW1E 6AT REINO UNIDO.
Inventor/es: KELL,JAMES, DAVIES,SAMANTHA, MCGILL,IAN, RIGG,GRAEME, RAFFLES,MARK, DAINE,MARK, KONG,MING, AXINTE,DRAGOS, MARINESCU,IULIAN, HERBERT,CHRISTOPHER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J17/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Uniones.
- B25J18/06 B25J […] › B25J 18/00 Brazos. › flexibles.
PDF original: ES-2545006_T3.pdf
Fragmento de la descripción:
Descripción Una herramienta flexible Esta invención se refiere a herramientas flexibles del tipo a veces referido como "robots con manos de serpiente".
Los robots con manos de serpiente se usan comúnmente para realizar inspecciones y otras operaciones en áreas peligrosas o limitadas, particularmente donde la naturaleza del área o la presencia de obstrucciones denotan que no existe un acceso con línea de mira hacia la región de interés dentro del área. Tales áreas limitadas existen en varios entornos industriales diferentes, a través de un intervalo extenso de tecnologías, por ejemplo en la ingeniería nuclear, aeronaves, motores, plantas industriales, arquitectura naval, edificaciones, carreteras y tuberías.
Los motores con turbina de gas se usan con numerosos propósitos, que incluyen los motores de propulsión para embarcaciones y aeronaves, para energizar las bombas para gas o petróleo, y para la generación de energía.
Cuando tales motores se usan en aeronaves, estos necesitan de inspección, mantenimiento y reparación periódicos. Es posible hacer esto mediante la remoción del motor de la aeronave y su desmantelamiento, pero existen desventajas serias en este método. Los motores con turbina de gas son máquinas complejas y su desmantelamiento (y reensamblaje subsecuente) es costoso y consume tiempo. Adicionalmente, remover el motor de la aeronave es en sí un procedimiento costoso y de larga duración. Mientras se remueve el motor, la aeronave no puede usarse, lo cual ocasiona inconveniencias y pérdidas financieras al operador. En consecuencia se ha hecho más común en los años recientes la realización de inspecciones y otras operaciones, donde sea posible, con el motor aún instalado.
Comúnmente se proporcionan numerosos puertos a los motores en sus envolturas externas, a través de las cuales pueden insertarse las herramientas de inspección. Estas herramientas permiten que se inspeccionen los componentes dentro del motor. En algunos casos, las herramientas de inspección pueden también maniobrarse a través de la parte frontal o posterior del motor, entre las aspas y las hélices. También puede llevarse a cabo un número muy limitado de operaciones de mantenimiento y reparación mediante la introducción de herramientas especialmente adaptadas a través de los puertos del animascopio. Entre las operaciones que de esta manera se llevan a cabo comúnmente están la inspección del animascopio, la inspección penetrante y la inspección ultrasónica.
Debido a las excelentes ventajas proporcionadas por la inspección in situ y las técnicas de reparación, sería deseable ser capaz de llevar a cabo un intervalo más extenso de operaciones mediante el uso de tales herramientas. Sin embargo, el alcance de tales operaciones se limita por las dimensiones del puerto del animascopio (típicamente de menos de 12 mm de diámetro) y por el tamaño de las aberturas subsecuentes en el interior del motor (por ejemplo entre hélices) . También puede ser difícil, si no imposible, acceder a los componentes más lejanos al puerto debido a las trayectorias tortuosas y a las distancias relativamente largas involucradas.
Se conocen animascopios flexibles, los cuales son similares en principio a los endoscopios médicos, y estos pueden ser útiles para alcanzar lugares menos accesibles dentro del motor. Sin embargo, estos pueden ser blandos y difíciles de posicionar con precisión debido a su rigidez reducida. Generalmente, tales dispositivos requieren guías mecánicas que los dirijan a lo largo de una trayectoria predeterminada.
La flexibilidad de los brazos robóticos convencionales se proporciona mediante un número pequeño de "codos" discretos, en los cuales se proporcionan las articulaciones. Esto limita su flexibilidad, y restringe su utilidad en áreas limitadas. Los robots con brazos de serpiente (también referidos a veces como robots continuos, torsos de elefante, brazos de pulpo, tentáculos o endoscopios dirigibles) comprenden un gran número de segmentos interconectados mediante articulaciones rotativas, y estos son en consecuencia más flexibles que los brazos robóticos convencionales. Los cables de control dentro del robot con brazos de serpiente se unen de manera selectiva a los segmentos para permitir un control o una dirección independiente de los segmentos separados. Un operador "dirigirá" típicamente la punta del robot con brazos de serpiente a través de una trayectoria deseada en el área limitada, y el software asegurará que el resto del robot siga y no se contamine en ninguna obstrucción dentro del área. También es posible controlar la flexión de tal robot articulación por articulación, o mediante la referencia a un sistema de coordenadas Cartesiano u otro sistema de coordenadas fijo.
Aunque se conoce que los robots con brazos de serpiente son lo suficientemente pequeños para ajustarse a través de puertos del animascopio de una turbina de gas, su capacidad de transporte de carga es tan pequeña (típicamente del orden de unos pocos gramos para un robot de 600 mm de longitud) que estos no se usan para operaciones de reparación. Los robots con brazos de serpiente conocidos con capacidad de transporte de carga mayor tienen diámetros correspondientemente mayores, y de esta manera no pueden ajustarse a través de los puertos del animascopio. Además, mientras más grande es un robot con brazos de serpiente, menor es su capacidad de transporte de carga en la punta. En consecuencia los robots con brazos de serpiente conocidos no se usan para llevar a cabo tales operaciones in situ.
El documento WO 2006/060775 describe un dispositivo de serpentina con una pluralidad de segmentos movibles interconectados entre sí.
Los inventores han ideado un robot con brazos de serpiente con una capacidad de transporte de carga significativamente mejorada, la cual permitirá que se lleve a cabo un intervalo mucho mayor de operaciones de inspección y reparación en motores instalados. Los robots con brazos de serpiente de conformidad con la invención pueden también fabricarse mayores que los robots conocidos, para una capacidad de transporte de carga dada.
La invención proporciona una herramienta flexible y un método de realización de una operación mediante el uso de una herramienta flexible como se propone en las reivindicaciones.
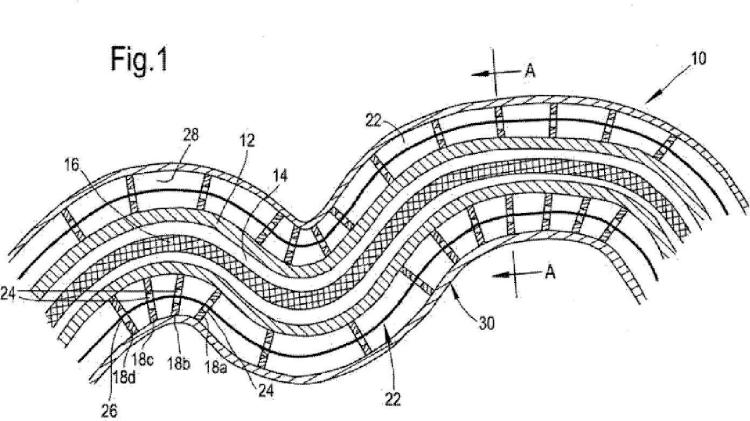
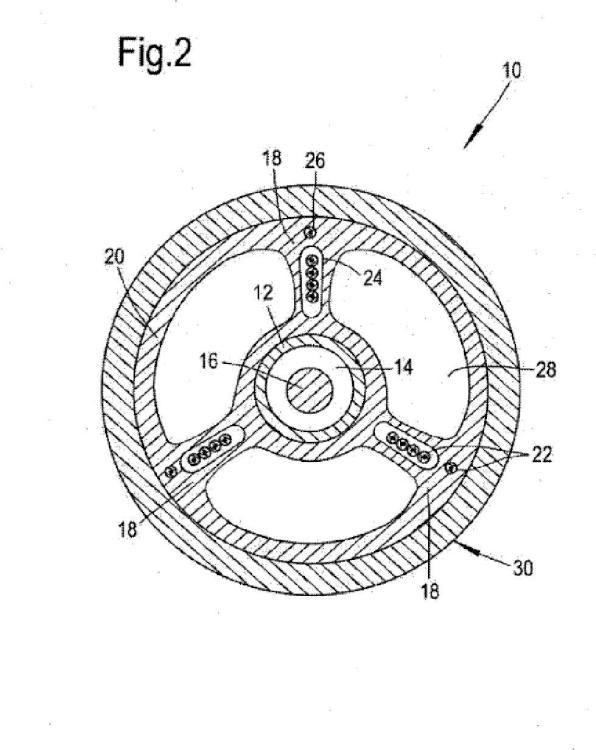
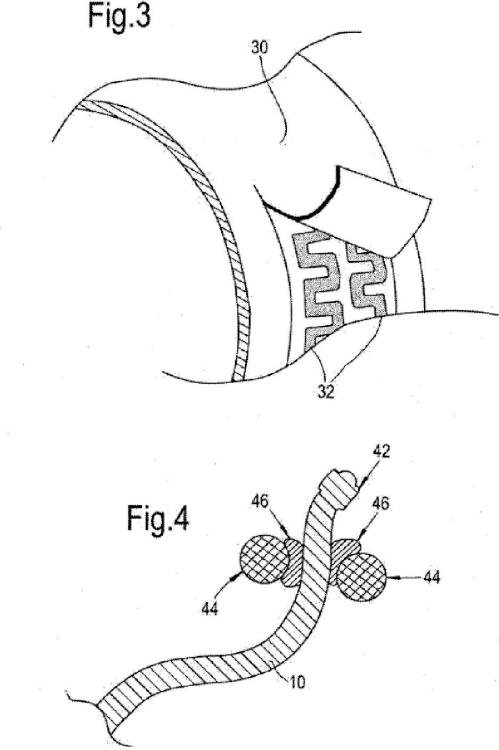
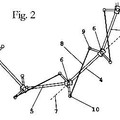
Las modalidades de la invención se describirán ahora, a modo de ejemplo, de manera que el modo en el que la invención se pondrá en efecto pueda ser mejor entendida. Se hará referencia a los dibujos adjuntos, en los cuales: La Figura 1 muestra una sección transversal longitudinal de parte de una herramienta flexible de conformidad con una primera modalidad de la invención; La Figura 2 muestra una sección transversal en la línea A-A mostrada en la Figura 1; La Figura 3 muestra parte de la superficie externa de la herramienta flexible de la Figura 1, con la capa de revestimiento parcialmente removida; y La Figura 4 muestra una ilustración esquemática de una herramienta flexible de conformidad con una segunda modalidad de la invención.
En referencia primero a las Figuras 1 y 2, una herramienta flexible de conformidad con la invención, mostrada generalmente en 10, tiene un eje principal 12 formado por un material flexible tal como una goma resistente a altas temperaturas. El eje principal 12 es tubular, y define un conducto central 14. Durante el uso, este conducto puede acomodar un mazo de fibra óptica, un cable para manejar una herramienta o similares 16. Las proyecciones que se extienden radialmente 18 están espaciadas a lo largo del eje principal 12 que soportan una pluralidad de varillas circulares espaciadas longitudinalmente 20. En esta modalidad, las proyecciones que se extienden radialmente 18 en cada posición axial se espacian por igual alrededor de la circunferencia del eje principal. Se visualiza que el diámetro de la herramienta es de menos de 12 mm, de manera que esta pueda ajustarse a través de los puertos del animascopio de un motor con turbina de gas.
La curvatura de la herramienta puede controlarse de una manera conocida, como sigue. Una pluralidad de cables de control cubiertos 22 funcionan a lo largo de la longitud de la herramienta (solamente se muestran dos en la Figura 1) , y a través de agujeros 24, 26 en las varillas 18. Los cables se mueven libremente a través de los agujeros 24 y se dirigen mediante estos, en contraste con los agujeros 26 en los cuales se fijan los cables en su lugar. En la modalidad mostrada, las articulaciones en la herramienta se definen efectivamente mediante grupos de cuatro proyecciones. La primera proyección fija el cable de control en un agujero 26 a partir de la articulación previa, mientras que los cables de control para esta y las articulaciones subsecuentes pasan a... [Seguir leyendo]
Reivindicaciones:
1. Una herramienta flexible (10) , que comprende:
una pluralidad de segmentos interconectados movibles relacionados entre sí; y medios rígidos, que comprenden un medio (28) el cual llena las áreas entre los elementos de la articulación (18a-d, 20) de los segmentos; en donde el medio (28) es conmutable durante el uso a partir de un primer estado de rigidez relativamente baja en donde el medio (28) se comporta como un fluido hacia un segundo estado de rigidez relativamente alta en donde el medio (28) es rígido y subsecuentemente conmutable a partir del segundo estado de regreso al primer estado; y en donde el medio (28) actúa en el primer estado para fluir a través de las áreas para permitir el movimiento relativo entre los segmentos y el medio (28) actúa en el segundo estado para cerrar los elementos de la articulación (18a-d, 20) entre los segmentos y prevenir el movimiento relativo entre los segmentos.
2. Una herramienta flexible (10) de conformidad con la reivindicación 1, en donde los medios rígidos comprenden un termoplástico o un termoplástico de fibra reforzada o una aleación de punto de baja fusión o un adhesivo endurecido por rayos ultravioletas.
3. Una herramienta flexible (10) de conformidad con las reivindicaciones 1 o 2, en donde los medios rígidos conmutan repetidamente entre los primer y segundo estados.
4. Una herramienta flexible (10) de conformidad con cualquiera de las reivindicaciones 1 a 3, que incluyen elementos de calefacción (32) , la conmutación que se alcanza mediante la aplicación selectiva de calor a los 25 medios rígidos mediante los elementos de calefacción (32) .
5. Una herramienta flexible (10) de conformidad con cualquiera de las reivindicaciones 1 a 3, que incluye elementos transmisores de luz, la conmutación a partir del primer estado hacia el segundo estado que se logra mediante la aplicación selectiva de luz ultravioleta a los medios rígidos mediante los elementos transmisores de luz.
6. Una herramienta flexible (10) de conformidad con cualquiera de las reivindicaciones 1 a 5, que incluye medios de control operados de manera remota para dirigir la flexión de la herramienta flexible (10) .
7. Una herramienta flexible (10) de conformidad con la reivindicación 6, en donde los medios de control operados de manera remota comprenden cables (22) o accionadores hidráulicos o neumáticos o elementos de aleación con memoria de forma.
8. Una herramienta flexible (10) de conformidad con las reivindicaciones 6 o 7, que incluye una pluralidad de 40 partes o segmentos que pueden flexionarse de manera independiente.
9. Una herramienta flexible (10) de conformidad con cualquiera de las reivindicaciones 1 a 8, que incluye un conducto (14) que flexible se extiende longitudinalmente a través de la herramienta (10) .
10. Una herramienta flexible (10) de conformidad con cualquiera de las reivindicaciones 1 a 9, que incluye un segmento de agarre (46) el cual se dispone para accionarse para localizar o asegurar la herramienta flexible (10) durante el uso.
11. Una herramienta flexible (10) de conformidad con la reivindicación 10, en donde el segmento de agarre (46) es 50 inflable.
12. Un método para realizar una operación mediante el uso de una herramienta flexible (10) como se reivindica en cualquier reivindicación precedente, el método que comprende las etapas:
insertar la herramienta flexible (10) en el área de trabajo; posicionar una punta de la herramienta flexible (10) en una posición deseada en el área de trabajo; conmutar los medios rígidos al segundo estado; realizar la operación; conmutar los medios rígidos al primer estado;
remover la herramienta flexible (10) del área de trabajo.
Patentes similares o relacionadas:
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Disposición articulada con al menos un eje accionado, del 26 de Abril de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Disposición articulada con al menos un eje accionado, en particular para activar un movimiento de un componente de un robot, - en donde al menos […]
Aparato de posicionamiento para uso biomédico, del 20 de Febrero de 2019, de CONMED CORPORATION: Aparato de posicionamiento médico para posicionar y sostener un objeto, que comprende: un componente telescópico que se extiende […]
Dispositivo de posicionamiento previo y de fijación amovible de miembros articulados de un robot humanoide, del 12 de Abril de 2017, de Softbank Robotics Europe: Robot móvil que comprende un tronco y varios miembros conectados al tronco de manera amovible, caracterizado porque comprende: […]
Un dispositivo de múltiples piezas de ligadura que tiene un miembro de refuerzo, del 20 de Junio de 2012, de CARNEGIE MELLON UNIVERSITY: Un dispositivo de múltiples piezas de ligadura o eslabones y dirigible, que comprende: un primer mecanismo de múltiples piezas de ligadura; caracterizado […]
 BRAZO POLIARTICULADO, del 19 de Abril de 2012, de PEPIOL ESPALLARGAS, FRANCISCO ANDRES: Brazo poliarticulado.
La invención se refiere a un brazo poliarticulado en un plano , que comprende un primer elemento , un segundo […]
BRAZO POLIARTICULADO, del 19 de Abril de 2012, de PEPIOL ESPALLARGAS, FRANCISCO ANDRES: Brazo poliarticulado.
La invención se refiere a un brazo poliarticulado en un plano , que comprende un primer elemento , un segundo […]
MAQUINA DE REVESTIMIENTO CON UN PULVERIZADOR Y UNA ARTICULACION GIRATORIA., del 16 de Octubre de 2005, de DURR SYSTEMS GMBH: Máquina de revestimiento para el revestimiento en serie electrostático de piezas de trabajo con un pulverizador el cual para la carga del material […]
 MECANISMO DE CINEMÁTICA PARALELA CON ARTICULACIÓN ESFÉRICA CONCÉNTRICA, del 7 de Febrero de 2011, de MERZ, MICHAEL: Un mecanismo para posicionar y orientar un componente final en el espacio con al menos cinco grados de libertad, comprendiendo el mecanismo: […]
MECANISMO DE CINEMÁTICA PARALELA CON ARTICULACIÓN ESFÉRICA CONCÉNTRICA, del 7 de Febrero de 2011, de MERZ, MICHAEL: Un mecanismo para posicionar y orientar un componente final en el espacio con al menos cinco grados de libertad, comprendiendo el mecanismo: […]