Dispositivo de fusión y conjunto de herramientas para la fusión de una articulación humana o animal.
Un dispositivo de fusión para la fusión de una articulación de un paciente humano o animal,
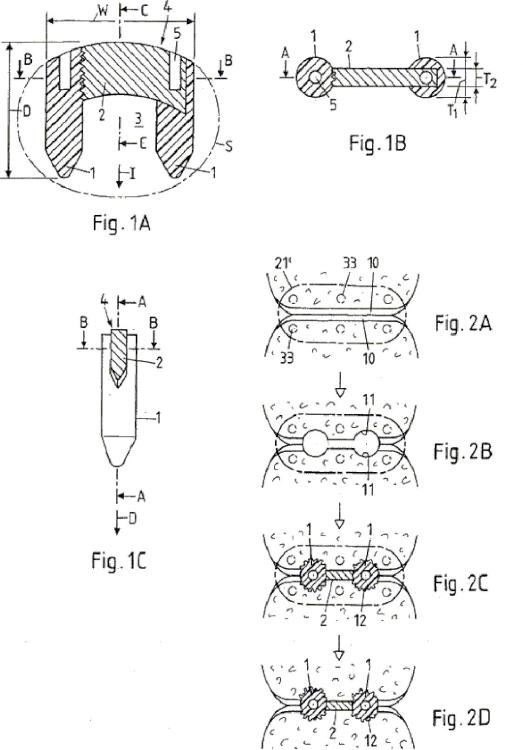
en el que la articulación es una articulación sinovial que comprende dos superficies articulares y una abertura entre ellas, comprendiendo el dispositivo de fusión:
al menos dos partes de anclaje (1) y al menos una parte de estabilización (2),
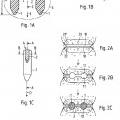
en el que el dispositivo de fusión tiene una profundidad total (D) paralela a la dirección de implantación (I), extendiéndose la profundidad total desde una cara proximal (4) a un extremo distal del dispositivo de fusión, una anchura total (W) y un perfil de grosor (T1 y T2) perpendiculares a la dirección de implantación (I), en el que las partes de anclaje (1) y la parte de estabilización (2) se disponen de forma alternada a lo largo de la anchura (W) por el hecho de que la parte de estabilización (2) está dispuesta entre las partes de anclaje (1), y en el que la(s) parte(s) de anclaje tienen un grosor (T1) que es mayor que el grosor (T2) de la(s) parte(s) de estabilización,
en el que al menos una parte de anclaje (1) comprende un material termoplástico licuable que está dispuesto en una superficie de la parte de anclaje (1) o en el interior de una vaina perforada (52) que constituye una parte de la parte de anclaje (1), en el que dicha superficie de la parte de anclaje (1) o dicha vaina perforada (52) está dispuesta en el dispositivo de fusión para estar en contacto con el tejido óseo en la implantación, y en el que las dos partes de anclaje son dos partes de anclaje (1) con forma de pin, en el que la profundidad de las partes de anclaje (1) es mayor que la profundidad de la parte de estabilización (2), y en el que, distalmente, las partes de anclaje y la parte de estabilización conforman en conjunto un contorno de dispositivo cóncavo que delimita una zona de osteoconducción (3).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CH2009/000337.
Solicitante: Spinewelding AG.
Nacionalidad solicitante: Suiza.
Dirección: Wagistrasse 6 8952 Schlieren SUIZA.
Inventor/es: MOCK, ELMAR, WEBER, URS, MAYER,JORG, Lehmann,Mario, MEHL,Stephanie, MUELLER,ANDREA, BERRA,MILICA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/70 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Dispositivos para mantener en posición o estabilizar la columna vertebral.
- A61F2/44 A61 […] › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00). › para la columna vertebral, p. ej. vértebras, discos intervertebrales.
PDF original: ES-2553591_T3.pdf



Patentes similares o relacionadas:
Kit de implante ortopédico, del 3 de Junio de 2020, de Neo Medical SA: Un kit de implante que comprende: un extensor de tornillo que incluye, un cuerpo cilíndrico hueco que incluye dos ranuras longitudinales opuestas […]
Procedimiento de fabricación de un implante, principalmente vertebral o intervertebral, e implante obtenido por este procedimiento, del 27 de Mayo de 2020, de MEDICREA INTERNATIONAL: Procedimiento de fabricación de un implante , principalmente vertebral o intervertebral, comprendiendo este implante (1, 21, […]
Instrumental mínimamente invasivo para la entrega de un espaciador interespinoso, del 6 de Mayo de 2020, de VERTIFLEX, INC: Un instrumento de inserción para un espaciador interespinoso, que comprende: un cuerpo cilíndrico alargado que tiene un extremo proximal […]
Fijador médico, del 15 de Abril de 2020, de RTG Scientific LLC: Un fijador médico, que comprende: un árbol alargado que tiene un extremo proximal y un extremo distal, estando una primera rosca […]
Sujetador, del 1 de Abril de 2020, de CURTIN UNIVERSITY OF TECHNOLOGY: Un sujetador adecuado para aplicaciones ortopédicas y dispuesto para la sujeción cuando se coloca en un agujero perforado en un hueso, el sujetador […]
Instrumentos médicos, del 4 de Marzo de 2020, de AESCULAP AG: Instrumental médico, que comprende un sistema integrado de navegación médico manual , que presenta una unidad de detección óptica con una cámara […]
Sistema de implantes y elemento de fijación para un sistema de implantes, del 4 de Marzo de 2020, de AESCULAP AG: Elemento de sujeción para un sistema de implantes que comprende al menos dos elementos de sujeción que pueden ser fijados a las […]
Sistema de tornillo pedicular y sistema de estabilización de la columna vertebral, del 26 de Febrero de 2020, de AESCULAP AG: Sistema de tornillo pedicular que comprende un tornillo pedicular con una caña de tornillo , que tiene una rosca externa y una cabeza […]