FRATASARORA QUE SE MANEJA CAMINANDO TRAS ELLA, EQUILIBRADA DINÁMICAMENTE.
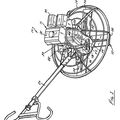
Una fratasadora (10) para el acabado de hormigón, que comprende:
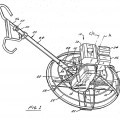
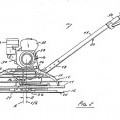
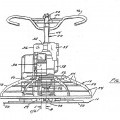
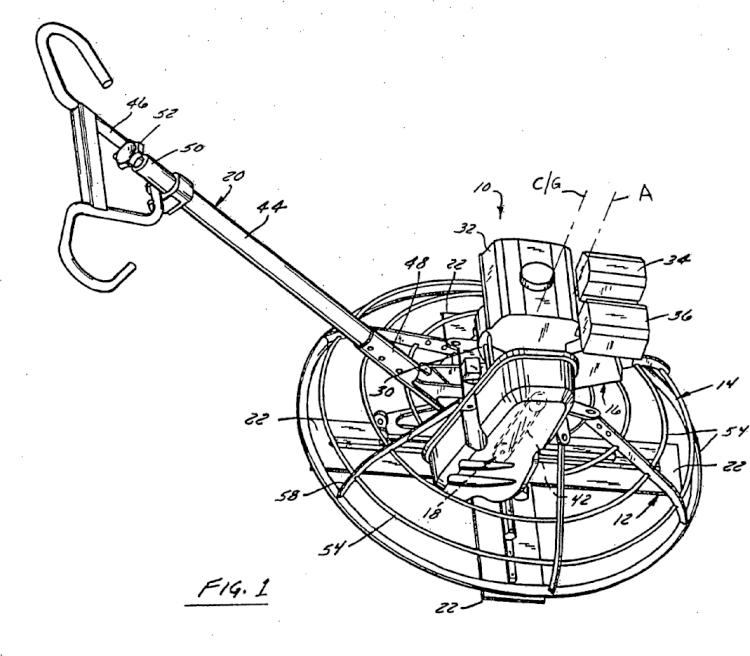
(A) un bastidor (14); (B) un motor (16) que está montado en dicho bastidor (14) y que tiene una salida giratoria; (C) un mango de guía (46) controlado por un operario, que se extiende hacia atrás desde el bastidor (14); y (D) un rotor (12) que incluye una pluralidad de palas (22) que pueden ser hechas girar en torno a un eje geométrico de rotación, caracterizada porque el peso de dicha fratasadora está distribuido de tal manera que dicha fratasadora esté equilibrada dinámicamente de forma que las fuerzas transmitidas al mango (46) al girar las palas (22) en contacto con una superficie que ha de ser acabada, se reduzcan sustancialmente en comparación con el caso de una fratasadora no equilibrada dinámicamente; y porque el centro de gravedad de la fratasadora (10) está desplazado longitudinalmente por detrás del eje de rotación del rotor (12), hacia el operario, así como lateralmente hacia la derecha del eje de rotación del rotor (12), según mira el operador
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04025229.
Solicitante: WACKER CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: N92 W15000 ANTHONY AVENUE MENOMONEE FALLS, WISCONSIN 530 ESTADOS UNIDOS DE AMERICA.
Inventor/es: KRUEPKE,GREGORY, Lutz,Todd J, Dauffenbach,Darrin W, Goldberg,Richard D.
Fecha de Publicación: .
Fecha Solicitud PCT: 22 de Octubre de 2004.
Clasificación Internacional de Patentes:
- E04F21/24 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04F TRABAJOS DE ACABADO DEL EDIFICIO, p. ej. ESCALERAS, REVESTIMIENTOS DE SUELOS (ventanas, puertas E06B). › E04F 21/00 Herramientas para trabajos de acabado de los edificios (para el trabajo o el tratamiento de la piedra de talla o análogo B28D; proyectado especialmente para detalles concretos contemplados en los grupos de esta subclase, véanse los grupos relativos a estos detalles). › hechos de productos preparados in situ , p. ej. herramientas para alisar.
Clasificación PCT:
- E04F21/24 E04F 21/00 […] › hechos de productos preparados in situ , p. ej. herramientas para alisar.
Clasificación antigua:
- E04F21/24 E04F 21/00 […] › hechos de productos preparados in situ , p. ej. herramientas para alisar.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2360050_T3.pdf
Fragmento de la descripción:
ANTECEDENTES DEL INVENTO
1. Campo del invento
El invento se refiere a fratasadoras para el acabado de hormigón y, más particularmente, se refiere a una fratasadora giratoria para el acabado de hormigón que se maneja caminando tras ella, que está dinámicamente equilibrada para reducir el esfuerzo del operario. El invento se refiere, además, a un método para hacer funcionar una fratasadora de esta clase.
2. Descripción de la técnica relacionada
Las fratasadoras que se manejan caminando tras ellas son generalmente conocidas para el acabado de superficies de hormigón. Una fratasadora que se maneja caminando tras ella incluye, generalmente, un rotor formado por una pluralidad de palas de fratasar que descansan sobre el suelo. El rotor es accionado por un motor montado en un bastidor o "jaula" que se encuentra sobre el rotor. La fratasadora es controlada por un operario a través de un mango que se extiende en varios decímetros desde la jaula. Las palas de fratasar giratorias proporcionan una máquina muy efectiva para acabar losas de hormigón de tamaño medio y grande. Sin embargo, las fratasadoras que se manejan caminando tras ellas presentan varios inconvenientes.
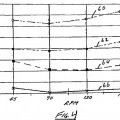
Por ejemplo, las palas giratorias imponen un par de torsión/fuerzas sustanciales sobre la jaula que deben ser contrarrestados por el operario a través del mango. Específicamente, la rotación de las palas impone un par sobre la jaula y el mango que tiende a hacer que el mango gire en sentido contrario al de las agujas del reloj o hacia la derecha del operario. Además, la rotación de las palas tiende a empujar a toda la máquina en dirección lineal, principalmente hacia atrás, exigiéndole al operario que empuje hacia delante sobre el mango para contrarrestar esas fuerzas. Las fuerzas y el par de torsión combinados, soportados por el operario son sustanciales y tienden a aumentar al incrementarse el coeficiente dinámico de fricción encontrado por las palas giratorias y que, a su vez, varía con la humedad del hormigón que está fraguando. El contrarrestar estas fuerzas puede resultar extremadamente fatigoso, en particular considerando el hecho de que la máquina es hecha funcionar, típicamente, durante varias horas cada vez.
El documento US 4.629.359 A describe una fratasadora para el acabo de hormigón que comprende un bastidor, un motor, un mango de guía controlado por el operario y un rotor con una pluralidad de palas, por lo que la fratasadora está equilibrada dinámicamente de tal manera que las fuerzas transmitidas al mango al girar las palas en contacto con una superficie que ha de ser acabada se reduzcan sustancialmente en comparación con una fratasadora no equilibrada dinámicamente.
El objeto del invento es proporcionar una fratasadora para el acabado de hormigón y un método para hacer funcionar una fratasadora giratoria de acabado que se maneja caminando tras ella, que sea más fácil de manipular para un operario.
El objeto se consigue mediante una fratasadora de acuerdo con la reivindicación 1 y un método de acuerdo con la reivindicación 17.
Los inventores han investigado técnicas para reducir la combinación de par de torsión/fuerzas de reacción que debe ser soportada por el operario. Han supuesto que estas fuerzas se reducirían si la fratasadora estuviese mejor equilibrada estáticamente de lo que es el caso ahora, típicamente, con las fratasadoras que se manejan caminando tras ellas, en las que el centro de gravedad está situado ligeramente por detrás y hacia la izquierda del eje de rotación del rotor. Los inventores han supuesto, por tanto, que desplazando el centro de gravedad de la fratasadora hacia delante, se reducirían las fuerzas de reacción. Sin embargo, han encontrado que este desplazamiento, en realidad, daba lugar a un incremento de las fuerzas de reacción generadas durante el funcionamiento de la fratasadora.
Por tanto, ha surgido la necesidad de proporcionar una fratasadora del tipo que se maneja caminando tras ella, que le exija al operario un esfuerzo sustancialmente menor para dirigirla y controlarla que en el caso de las fratasadoras usuales del tipo que se maneja caminando tras ellas.
Además ha surgido la necesidad de reducir el esfuerzo exigido al operario para dirigir y controlar una fratasadora del tipo que se maneja caminando tras ella.
SUMARIO DEL INVENTO
De acuerdo con el invento, una fratasadora giratoria que se maneja caminando tras ella está configurada de manera que esté mejor "equilibrada dinámicamente" con el fin de reducir al mínimo la combinación de fuerzas/par de torsión que el operario debe soportar para controlar y guiar la fratasadora. El diseño tiene en cuenta el funcionamiento tanto en condiciones estáticas como dinámicas y los atributos de la fratasadora, y "equilibra" estos atributos con las características funcionales del acabado del hormigón. Las características que se han tenido en cuenta para este diseño incluyen, aunque sin limitarse a ellas, la fricción, el par del motor, el centro de gravedad de la máquina y la posición del mango de guía. Como resultado, se ha encontrado que el equilibrado dinámico y la consiguiente reducción de fuerza/par se conseguían cuando el centro de gravedad de la máquina estaba desplazado sustancialmente con relación a la posición del centro de gravedad de una máquina típica. Este efecto puede conseguirse de la forma más práctica invirtiendo la orientación del motor con relación al conjunto del mango de guía, en comparación con las fratasadoras giratorias tradicionales del tipo que se maneja caminando tras ellas y desplazando el motor hasta el máximo práctico hacia la derecha. Se ha encontrado que este desplazamiento reduce las fuerzas y el par de torsión que el operario debe soportar durante el funcionamiento, al menos, en un 50% en comparación con el caso de las máquinas tradicionales. De esta manera se reduce sustancialmente la fatiga del operario.
Estas y otras ventajas y características del invento resultarán evidentes para los expertos en la técnica a partir de la descripción detallada y de los dibujos adjuntos. Sin embargo, debe comprenderse que la descripción detallada y los dibujos adjuntos, si bien se refieren a realización preferidas del presente invento, se ofrecen a modo de ilustración y no con fines limitativos.
El invento comprende además una fratasadora para el acabado de hormigón, que incluye:
(A) un bastidor; 15 (B) un motor que está montado en el citado bastidor;
(C) un mango de guía controlado por el operario, que se extiende hacia atrás desde el bastidor; y
(D) un rotor que incluye una pluralidad de palas que pueden ser hechas girar alrededor de un eje geométrico de rotación,
cuya fratasadora tiene un centro de gravedad que está desplazado longitudinalmente por detrás y lateralmente hacia la 20 derecha del eje de rotación del rotor.
Una realización de dicha fratasadora comprende un motor con un árbol de salida dirigido hacia la derecha de dicha fratasadora y un silenciador orientado hacia el frente de dicha fratasadora.
Un método de construir la fratasadora para el acabado de hormigón comprende las operaciones de:
(A) proporcionar un bastidor; (B) proporcionar un rotor que pueda montarse en el mencionado bastidor, incluyendo dicho rotor una pluralidad de palas que pueden ser hechas girar en torno a un eje geométrico de rotación;
(C) proporcionar un motor que pueda montarse en el citado bastidor;
(D) proporcionar un mango de guía configurado para extenderse hacia atrás desde dicho bastidor;
(E) determinar un desplazamiento entre el eje de rotación del rotor y el centro de gravedad de la fratasadora, que dé 30 como resultado un equilibrio dinámico deseado durante el funcionamiento de la fratasadora; y
(F) montar la fratasadora con el fin de conseguir dicho desplazamiento.
En otra realización, dicha fratasadora comprende la operación de determinación que incluye determinar un desplazamiento lateral deseado.
Este método, según el cual el desplazamiento lateral deseado se determina en otra realización, tiene en cuenta 35 la ecuación siguiente:
ha c b
donde: c = el desplazamiento lateral; h = la altura del mango de guía;
40 a = la longitud de una línea horizontal que conecta el eje de rotación del rotor con el baricentro de las fuerzas que actúan sobre una de las palas de la fratasadora, suponiéndose... [Seguir leyendo]
Reivindicaciones:
1. Una fratasadora (10) para el acabado de hormigón, que comprende:
(A) un bastidor (14);
(B) un motor (16) que está montado en dicho bastidor (14) y que tiene una salida giratoria; 5 (C) un mango de guía (46) controlado por un operario, que se extiende hacia atrás desde el bastidor (14); y
(D) un rotor (12) que incluye una pluralidad de palas (22) que pueden ser hechas girar en torno a un eje geométrico de rotación,
caracterizada porque
el peso de dicha fratasadora está distribuido de tal manera que dicha fratasadora esté equilibrada dinámicamente de forma que las fuerzas transmitidas al mango (46) al girar las palas (22) en contacto con una superficie que ha de ser acabada, se reduzcan sustancialmente en comparación con el caso de una fratasadora no equilibrada dinámicamente; y porque
el centro de gravedad de la fratasadora (10) está desplazado longitudinalmente por detrás del eje de rotación del rotor (12), hacia el operario, así como lateralmente hacia la derecha del eje de rotación del rotor (12), según mira el operador.
2. La fratasadora (10) como se reivindica en la reivindicación 1, cuya fratasadora (10) es una fratasadora (10) de 91 cm (36 pulgadas), y el centro de gravedad de la fratasadora está situado entre 0 cm (0,00 pulgadas) y 5,08 cm (2,00 pulgadas) a la derecha del eje de rotación del rotor (12).
3. La fratasadora (10) como se reivindica en la reivindicación 2, y en la que el centro de gravedad de la fratasa
dora (10) está situado entre 5,08 cm (2,00 pulgadas) y 11,43 cm (4,50 pulgadas) por detrás del eje de rotación del rotor 20 (12).
4. La fratasadora (10) como se reivindica en la reivindicación 3, en la que el centro de gravedad de la fratasadora está situado a 1,95 cm (0,75 pulgadas) aproximadamente a la derecha y a unos 9,8425 cm (3,875 pulgadas) por detrás del eje de rotación del rotor (12).
5. La fratasadora (10) como se reivindica en la reivindicación 1, cuya fratasadora (10) es una fratasadora (10)de 122 cm (48 pulgadas) y en la que el centro de gravedad de la fratasadora está situado entre 0 cm (0,00 pulgadas) y 3,81 cm (1,50 pulgadas) a la derecha del eje de rotación del rotor (12).
6. La fratasadora (10) como se reivindica en la reivindicación 5, en la que el centro de gravedad de la fratasadora está situado entre 5,08 cm (2,00 pulgadas) y 11,43 cm (4,50 pulgadas) por detrás del eje de rotación del rotor (12).
7. La fratasadora (10) como se reivindica en la reivindicación 6, en la que el centro de gravedad de la fratasadora está situado a 0,9525 cm (0,375 pulgadas) aproximadamente a la derecha y a unos 9,525 cm (3,750 pulgadas) por detrás del eje de rotación del rotor (12).
8. La fratasadora (10) como se reivindica en la reivindicación 1, en la que dicho motor tiene un árbol de salida dirigido hacia la derecha de dicha fratasadora (10) y un silenciador orientado hacia delante de dicha fratasadora (10).
9. La fratasadora (10) como se reivindica en la reivindicación 1, en la que los desplazamientos longitudinal y35 lateral se seleccionan dependiendo uno de otro.
10. La fratasadora (10) como se reivindica en la reivindicación 8, en la que los desplazamientos longitudinal y lateral se seleccionan basándose, al menos en parte, en por lo menos una de las siguientes ecuaciones:
2
dF a F F bF
ww 45 45
b
F23
ea
h
**(Ver fórmula)**
**(Ver fórmula)**
b
donde
40 F23 = las fuerzas longitudinales combinadas comunicadas al mango de guía (46); d = el desplazamiento longitudinal; Fw = la fuerza de la gravedad en el centro de gravedad de la fratasadora (10);
a = la longitud de una línea horizontal que conecta el eje de rotación del rotor (12) con el baricentro de las fuerzas que actúan sobre una de las palas (22) de la fratasadora (10), suponiéndose que "a" es la misma para todas las palas de la fratasadora (10);
b = la distancia longitudinal existente entre el eje de rotación de la fratasadora (10) y el mango de guía (46); F45 = las fuerzas verticales combinadas que se comunican al mango de guía (46); h = la altura del mango de guía (46); e = la mitad de la longitud lateral del mango de guía (46); y = el coeficiente de fricción dinámico de la superficie acabada; y
2 22 2 223
b hc ceab ha b hea ehbd eha ab d abF F
45 w 222 223
ha hea eha ehb ab ab3
donde: c = el desplazamiento lateral.
11. La fratasadora (10) como se reivindica en la reivindicación 1, en la que los desplazamientos lateral y longitudinal se determinan teniendo en cuenta la longitud y la posición del mango de guía (46) y las fuerzas típicas generadas por el par de torsión.
12. La fratasadora (10) como se reivindica en la reivindicación 11, en la que los desplazamientos lateral y longitudinal se determinan teniendo en cuenta el coeficiente de fricción de la superficie acabada.
13. La fratasadora (10) como se reivindica en la reivindicación 1, en la que el desplazamiento longitudinal se determina teniendo en cuenta la siguiente ecuación
2
a
d
b
donde: d = el desplazamiento lateral; a = la longitud de una línea horizontal que conecta el eje de rotación del rotor (12) con el baricentro de las fuerzas que
actúan sobre una de las palas (22) de la fratasadora (10), suponiéndose que "a" es la misma para todas las palas de la fratasadora (10); y b = la distancia longitudinal existente entre el eje de rotación de la fratasadora (10) y el mango de guía (46).
14. La fratasadora (10) como se reivindica en la reivindicación 1, en la que el desplazamiento lateral se determina teniendo en cuenta la siguiente ecuación
ha c b
donde: c = el desplazamiento lateral; h = la altura del mango de guía (46); a = la longitud de una línea horizontal que conecta el eje de rotación del rotor (12) con el baricentro de las fuerzas que
actúan sobre una de las palas (22) de la fratasadora (10), suponiéndose que "a" es la misma para todas las palas de la fratasadora (10); = el coeficiente dinámico de fricción de la superficie acabada; y b = la distancia longitudinal existente entre el eje de rotación de la fratasadora (10) y el mango de guía (46).
15. La fratasadora (10) como se reivindica en la reivindicación 1, cuya fratasadora (10) está configurada para imponer una fuerza media dirigida hacia atrás sobre el mango de guía (46) no mayor de unos 222 N (50 libras).
16. La fratasadora (10) como se reivindica en la reivindicación 15, cuya fratasadora (10) está configurada para imponer una fuerza media dirigida hacia atrás sobre el mango de guía (46) no mayor de unos 133 N (30 libras).
17. Un método de hacer funcionar una fratasadora giratoria de acabado que se maneja caminando tras ella, cuya fratasadora incluye un bastidor (14), un motor (16) que está montado en dicho bastidor, y un mango de guía (46)
5 controlado por un operario, que se extiende hacia atrás desde dicho bastidor (14) y un rotor (12) que incluye una pluralidad de palas (22) que pueden ser hechas girar en torno a un eje geométrico de rotación, cuyo método comprende:
(A) acabar una superficie de hormigón accionando dicho rotor (12) para hacerlo girar con dichas palas (22) en contacto con dicha superficie;
(B) durante la operación de acabado, manipular manualmente dicho mango de guía con el fin de guiar dicha fratasado10 ra;
caracterizado porque
los componentes de la fratasadora se sitúan de tal manera que el peso de los componentes de la fratasadora esté distribuido de modo que, durante la operación de acabado, a la manipulación de dicho mango de guía se opongan fuerzas de reacción no mayores que unos 222 N (50 libras); y porque el centro de gravedad de la fratasadora (10) se desplaza longitudinalmente por detrás del eje de rotación del rotor (12), hacia el operario, así como lateralmente hacia la derecha del eje de rotación del rotor (12) según mira el operario.
18. El método reivindicado en la reivindicación 17, en el que a dicha manipulación se oponen fuerzas de reacción no mayores de unos 133 N (30 libras).
Patentes similares o relacionadas:
Caja de acabado con conjunto de cuchillas, del 18 de Marzo de 2020, de Axia Acquisition Corporation: Una caja de aplicador que comprende: una carcasa que tiene un extremo delantero y un extremo trasero, la carcasa que incluye un fondo y […]
Herramienta para nivelar una capa de hormigón o similar en un trabajo de construcción, del 18 de Julio de 2019, de Giacobbe, Francesco: Una herramienta para nivelar una capa de hormigón o similar en un trabajo de construcción, que comprende: - una parte fija concebida para ser colocada […]
Aparato para la aplicación de un producto líquido de parcheo, del 19 de Octubre de 2018, de Perdreau, Patrick: Aparato para la aplicación en el suelo de un producto de parcheo, caracterizado por que el mismo comprende: - un soporte apto para ser desplazado manualmente en […]
 Máquina de enrasar y método para nivelar bases de suelo, del 13 de Enero de 2016, de Lomar S.r.l: Máquina de enrasar para nivelar bases de suelo, que comprende un cuerpo o bastidor principal (BB) medios de soporte y manipulación (AA) del bastidor (BB) […]
Máquina de enrasar y método para nivelar bases de suelo, del 13 de Enero de 2016, de Lomar S.r.l: Máquina de enrasar para nivelar bases de suelo, que comprende un cuerpo o bastidor principal (BB) medios de soporte y manipulación (AA) del bastidor (BB) […]
Embrague de arrastre por fricción que tiene miembros con rampa, del 25 de Marzo de 2015, de The Hilliard Corporation: Un embrague de arrastre por fricción que comprende: un cubo adaptado para ser acoplado con y girado alrededor de un eje mediante un mecanismo de arrastre; una primera […]
Máquina regleadora para nivelar bases de suelos, del 26 de Noviembre de 2014, de Lomar S.r.l: Máquina regleadora para nivelar bases de suelos, que comprende un bastidor o cuerpo principal (BB), unos medios de soporte y manejo (AA) del bastidor (BB) en al menos […]
 PROCEDIMIENTO PARA ALISAR PAREDES DE YESO, CON TEMPLE PICADO O QUITAR GOTELÉ Y HERRAMIENTA PARA APLICAR DICHO PROCEDIMIENTO, del 9 de Abril de 2012, de K.G.V. SOLUCIONES, S.L: Procedimiento para alisar paredes de yeso, temple picado o quitar gotelé y herramienta para aplicar dicho procedimiento, consistente en:
- Aplicar, a pistola o rodillo, […]
PROCEDIMIENTO PARA ALISAR PAREDES DE YESO, CON TEMPLE PICADO O QUITAR GOTELÉ Y HERRAMIENTA PARA APLICAR DICHO PROCEDIMIENTO, del 9 de Abril de 2012, de K.G.V. SOLUCIONES, S.L: Procedimiento para alisar paredes de yeso, temple picado o quitar gotelé y herramienta para aplicar dicho procedimiento, consistente en:
- Aplicar, a pistola o rodillo, […]
 FRENO PARA CAJA DE CAMBIOS DE FRATASADORA, del 7 de Octubre de 2009, de WACKER CORPORATION: Una caja de cambios para una fratasadora giratoria para el acabado de hormigón, que comprende: #(A) un alojamiento , #(B) un elemento de entrada giratorio […]
FRENO PARA CAJA DE CAMBIOS DE FRATASADORA, del 7 de Octubre de 2009, de WACKER CORPORATION: Una caja de cambios para una fratasadora giratoria para el acabado de hormigón, que comprende: #(A) un alojamiento , #(B) un elemento de entrada giratorio […]