Faro de automóvil.
Faro, especialmente para un automóvil, para producir una distribución de luz variable,
comprendiendo el faro al menos un componente móvil (B; 12) para variar la distribución de luz y un dispositivo sensorial (2) compuesto por dos elementos de sensor (P, S), estando asignados el primer elemento de sensor (P; S) y el segundo elemento de sensor (S; P) respectivamente o bien al componente móvil (B; 12) o bien a un componente fijo (F; 14), y presentando el componente móvil (B; 12) un grado de libertad con respecto al componente fijo (F; 14), caracterizado
- por que el primer elemento de sensor (P; S) presenta un grado de libertad con respecto al componente móvil (B; 12) asignado o con respecto al componente fijo (F; 14) asignado,
- por que el grado de libertad del componente móvil (B; 12) y el grado de libertad del primer elemento de sensor (P; S) se encuentran en una relación lineal, según la que dos vectores de movimiento que están asignados respectivamente a uno de los grados de libertad y cuyo valor es respectivamente desigual a cero, son dependientes linealmente,
- por que un dispositivo de sujeción (24) que sujeta el primer elemento de sensor (P; S) o el dispositivo de alojamiento (20) presenta los dientes (68) que son de un material más duro que el material asignado para la fijación,
- y por que los grados de libertad del primer elemento de sensor (P; S) con respecto al componente móvil (B; 12) asignado o con respecto al componente fijo (F; 14) se pueden reducir a cero, clavándose las puntas de los dientes (68) en el material más blando.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11160102.
Solicitante: AUTOMOTIVE LIGHTING REUTLINGEN GMBH..
Nacionalidad solicitante: Alemania.
Dirección: Tübinger Strasse 123 72762 Reutlingen ALEMANIA.
Inventor/es: BRENDLE,MATTHIAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60Q1/076 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60Q DISPOSICION DE DISPOSITIVOS DE SEÑALIZACION O ILUMINACION, SU MONTAJE O SOPORTE, SUS CIRCUITOS, PARA VEHICULOS EN GENERAL. › B60Q 1/00 Disposición de dispositivos de señalización óptica o de iluminación, su montaje, su soporte o los circuitos a este efecto (para la iluminación del interior del vehículo B60Q 3/00). › por medios eléctricos.
PDF original: ES-2528952_T3.pdf
Fragmento de la descripción:
Faro de automóvil.
La invención se refiere a un faro, especialmente para un automóvil, según el preámbulo de la reivindicación 1 y a un 5 procedimiento para el ajuste del faro.
Son conocidos los faros, especialmente para un automóvil, para producir una distribución variable de la luz. Para ello, habitualmente un módulo de luz u otro componente del faro que influye en la dirección de la luz emitida está montado de forma móvil. Por ejemplo, para realizar una llamada luz dinámica para curvas, el módulo de luz u otro 10 componente del faro está montado de forma horizontalmente pivotante alrededor de un eje vertical.
Un faro genérico se dio a conocer por ejemplo por el documento EP1854665A1. Por el documento DE202008007470U1 se dio a conocer un dispositivo de ajuste para un faro de automóvil con un dispositivo sensorial. 15
Para realizar la función de la luz dinámica para curvas, debe conocerse en todo momento la posición exacta del módulo de luz o del componente móvil. Para ello, se conocen diferentes técnicas: por una parte, una posición del módulo de luz puede ser detectada durante el funcionamiento por un dispositivo sensorial (medición del valor absoluto de la posición actual del módulo de luz) . Durante ello, se realiza una variación regulada de la posición del 20 módulo de luz o del otro componente. Por otra parte, el módulo de luz puede ajustarse en una posición de partida y estar conectado a una unidad de accionamiento que puede ser controlada exactamente (detección de la posición actual a través del ángulo de desviación con respecto a la posición de partida) , siendo controlada la posición del módulo de luz.
En caso de usar el dispositivo sensorial (medición de valor absoluto) , este se ha de ajustar antes del funcionamiento previsto del faro, a fin de compensar tolerancias de fabricación de los componentes y tolerancias de montaje del faro y poder cumplir una posición cero (posición recta) del módulo de luz así como un punto de trabajo ideal del dispositivo sensorial, correspondiente a la posición cero.
Para realizar el ajuste del dispositivo sensorial, por ejemplo se puede depositar o ajustar de otra manera en una memoria digital un valor de corrección del dispositivo sensorial determinado en el final de la línea después del montaje del módulo de luz. Esto se describe por ejemplo en el documento DE102005041195A1 donde el valor de corrección se ajusta mediante una destrucción de condensadores. Este principio de ajuste corresponde a una corrección offset eléctrica, es decir, a un ajuste eléctrico. 35
Dado que, fuera de su punto de trabajo ideal, la mayoría de los sensores suministran señales que ya no presentan una característica deseada como por ejemplo un alto gradiente, un ajuste eléctrico conduce a una señal de medición de mala calidad.
Para determinar la desviación con respecto a una posición de partida definida es necesario un acoplamiento directo de la unidad de accionamiento al módulo de luz pivotante. Durante ello, se prescinde del dispositivo sensorial.
Partiendo del estado de la técnica descrito, la presente invención tiene el objetivo de realizar y perfeccionar el faro de tal forma que la medición de valor absoluto de la posición del componente móvil del faro pueda realizarse con 45 exactitud y con el menor gasto posible.
Para conseguir este objetivo se propone un faro con las características de la reivindicación 1 y un procedimiento con las características de la reivindicación 6.
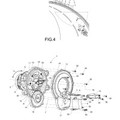
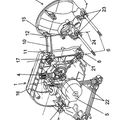
El faro según la invención comprende por tanto el dispositivo sensorial que detecta una posición de movimiento según un grado de libertado del componente móvil. La desviación se produce por ejemplo entre un marco pivotante, al que está fijado el módulo de luz, y un marco de sujeción. Especialmente, es posible que para realizar una función de luz dinámica para curvas, el módulo de luz esté montado en el marco de sujeción de forma pivotante alrededor de un eje vertical. El marco de sujeción puede estar realizado de forma fija o igualmente de forma móvil con respecto a 55 una carcasa de faro (por ejemplo, de forma pivotante alrededor del eje horizontal para realizar una regulación de ancho de alumbrado) .
El dispositivo sensorial se compone de dos elementos de sensor. Uno está asignado al marco de sujeción y el otro al marco pivotante. Al menos uno de los elementos de sensor puede moverse para el ajuste en o dentro del 60 componente asignado e inmovilizarse o fijarse en una posición de ajuste.
En cuanto a las características de material y la fabricación de los distintos componentes y el montaje del faro se pueden admitir ciertas tolerancias que se vuelven a compensar por el ajuste. Por ejemplo, una posición diferente de un punto de trabajo de diferentes dispositivos sensoriales puede compensarse mediante el ajuste. 65
Por los requisitos más reducidos en cuanto a la tolerancia disminuye el gasto relacionado con el desarrollo y la fabricación y finalmente también los costes garantizando al mismo tiempo la continuidad de la alta disponibilidad y fiabilidad del funcionamiento del faro.
Evidentemente, el componente móvil puede ser, además de un módulo de luz, también cualquier otro componente 5 del faro. Un ejemplo de ello es una disposición de diafragma (para variar la posición de un límite claro-oscuro de una distribución de luz diafragmada o para cambiar la distribución de luz entre luz de cruce y luz larga) . También sería posible un componente móvil en forma de una lente de proyección, a través de la que, para producir la distribución de luz deseada, la luz reflejada se proyecta a la calzada delante del automóvil. Mediante un giro de la lente alrededor de un eje vertical o mediante el deslizamiento de la lente en sentido horizontal con respecto al módulo de 10 luz restante se puede variar la distribución de luz en sentido horizontal.
El primer elemento de sensor presenta un grado de libertad con respecto al componente móvil asignado o con respecto al componente fijo asignado. Además, el grado de libertad del componente móvil y el grado de libertad del primer elemento de sensor se encuentran en una relación lineal. De esta manera, el primer elemento de sensor se 15 puede ajustar y fijar con respecto al otro elemento de sensor, por lo que se pueden compensar tolerancias. El primer elemento de sensor ya no presenta ningún grado de libertad después de una fijación con respecto al componente móvil asignado o con respecto al componente fijo.
Un dispositivo de sujeción que sujeta el primer elemento de sensor o el dispositivo de alojamiento presentan dientes. 20 Los dientes se clavan en un dispositivo previsto correspondiente y de esta manera permiten una fijación sencilla y duradera del primer elemento de sensor. Los dientes se componen de un material más duro que el material asignado para la fijación. De esta manera, las puntas de los dientes pueden clavarse de forma ventajosa en el material más blando y se produce una unión geométrica. De esta manera, al introducir el elemento de sensor en el dispositivo de alojamiento se produce una deformación en parte elástica y en parte plástica que a continuación se 25 convierte en una deformación puramente plástica. De esta manera, se consigue de forma sencilla una unión geométrica.
En una forma de realización ventajosa del faro, el primer elemento de sensor puede ser alojado por un dispositivo de alojamiento. El dispositivo de alojamiento hace que el primer elemento de sensor presente sólo un grado de libertad 30 y que se pueda fijar con respecto al componente móvil asignado o con respecto al componente fijo asignado. Por lo tanto, el dispositivo de alojamiento determina de manera ventajosa la manera en que son posibles el ajuste y la fijación del primer elemento de sensor.
Una variante ventajosa del faro prevé que la cara de ataque de los dientes es perpendicular con respecto a una 35 dirección de introducción y que el dorso de los dientes está orientado en la dirección de introducción. De esta manera se consigue que el primer elemento de sensor se pueda introducir de manera sencilla por ejemplo en el dispositivo de alojamiento. Además, la geometría de los dientes permite que después de alcanzar una posición de ajuste, los dientes se claven en un dispositivo dispuesto correspondientemente.
En una variante ventajosa del faro está previsto un dispositivo de desenclavamiento, estando previsto el dispositivo de desenclavamiento para separar el primer elemento de sensor del componente móvil asignado o del componente fijo asignado. De esta manera, un primer elemento de sensor defectuoso puede retirarse fácilmente y sustituirse por un elemento de sensor nuevo.
Una... [Seguir leyendo]
Reivindicaciones:
1. Faro, especialmente para un automóvil, para producir una distribución de luz variable, comprendiendo el faro al menos un componente móvil (B; 12) para variar la distribución de luz y un dispositivo sensorial (2) compuesto por dos elementos de sensor (P, S) , estando asignados el primer elemento de sensor (P; S) y el segundo elemento de 5 sensor (S; P) respectivamente o bien al componente móvil (B; 12) o bien a un componente fijo (F; 14) , y presentando el componente móvil (B; 12) un grado de libertad con respecto al componente fijo (F; 14) , caracterizado
- por que el primer elemento de sensor (P; S) presenta un grado de libertad con respecto al componente móvil (B; 12) asignado o con respecto al componente fijo (F; 14) asignado, 10
- por que el grado de libertad del componente móvil (B; 12) y el grado de libertad del primer elemento de sensor (P; S) se encuentran en una relación lineal, según la que dos vectores de movimiento que están asignados respectivamente a uno de los grados de libertad y cuyo valor es respectivamente desigual a cero, son dependientes linealmente,
- por que un dispositivo de sujeción (24) que sujeta el primer elemento de sensor (P; S) o el dispositivo de 15 alojamiento (20) presenta los dientes (68) que son de un material más duro que el material asignado para la fijación,
- y por que los grados de libertad del primer elemento de sensor (P; S) con respecto al componente móvil (B; 12) asignado o con respecto al componente fijo (F; 14) se pueden reducir a cero, clavándose las puntas de los dientes (68) en el material más blando. 20
2. Faro según la reivindicación 1, caracterizado por que el primer elemento de sensor (P; S) puede ser alojado por un dispositivo de alojamiento (20; 21) , por que estando alojado por el dispositivo de alojamiento (20; 21) el primer elemento de sensor (P; S) presenta un grado de libertad, y por que todos los grados de libertad del primer elemento de sensor (P; S) con respecto al componente móvil (B; 12) o componente fijo (F; 14) asignados se pueden reducir a 25 cero.
3. Faro según la reivindicación 1 o 2, caracterizado por que la cara de ataque (152) de los dientes (68) es perpendicular a una dirección de introducción (204; 222) y por que la cara de ataque (154) de los dientes (68) está orientada en la dirección de introducción (204; 222) . 30
4. Faro según una de las reivindicaciones 1 a 3, caracterizado por que está previsto un dispositivo de desenclavamiento (72, 73, 74, 76, 78) para separar el primer elemento de sensor (P; S) del componente móvil (B; 12) asignado o del componente fijo (F; 14) asignado.
5. Faro según la reivindicación 4, caracterizado por que los dientes (68) están dispuestos en un dispositivo de sujeción (24) en almas (72) , por que una pieza parcial (76) se puede extraer de un alma terminal (74) del dispositivo de sujeción (24) , que une las almas (72) , y por que las zonas finales (78) producidas por el alma terminal (74) se pueden comprimir de tal forma que los dientes (68) pueden retirarse del dispositivo de alojamiento (20) .
6. Procedimiento para el ajuste de un faro, especialmente de un automóvil, sirviendo el faro para producir una distribución de luz variable, comprendiendo el faro al menos un componente móvil (B; 12) para variar la distribución de luz y un dispositivo sensorial compuesto por dos elementos de sensor (P, S) , estando asignados el primer elemento de sensor (P; S) y el segundo elemento de sensor (S; P) respectivamente o bien al componente móvil (B; 12) o bien a un componente fijo (F; 14) , y presentando el componente móvil (B; 12) un grado de libertad con 45 respecto al componente fijo (F; 14) , caracterizado
- por que el primer elemento de sensor (P; S) presenta un grado de libertad con respecto al componente móvil (B; 12) asignado o con respecto al componente fijo (F; 14) asignado,
- por que el grado de libertad del componente móvil (B; 12) y el grado de libertad del primer elemento de 50 sensor (P; S) se encuentran en una relación lineal, según la que dos vectores de movimiento que están asignados respectivamente a uno de los grados de libertad y cuyo valor es respectivamente desigual a cero, son dependientes linealmente,
- por que un dispositivo de sujeción (24) que sujeta el primer elemento de sensor (P; S) o el dispositivo de alojamiento (20) presenta dientes (68) que son de un material más duro que el material asignado para la fijación, 55
- por quen en el procedimiento, en un primer paso de ajuste, el componente móvil (B; 12) se pone en una posición cero con respecto al componente fijo (F; 14) ,
- por que en un segundo paso de ajuste, el primer elemento de sensor (P; S) se pone en una posición de ajuste con respecto al componente móvil (B; 12) asignado o con respecto al componente fijo (F; 14) asignado,
- y por que en un tercer paso de ajuste, el primer elemento de sensor (P; S) se fija con respecto al componente 60 móvil (B; 12) asignado o con respecto al componente fijo (F; 14) asignado, durante lo que las puntas de los dientes (68) se clavan en el material más blando.
7. Procedimiento según la reivindicación 6, caracterizado por que uno de los elementos de sensor (P; S) genera en la posición de ajuste una señal de sensor (4) y por que la señal de sensor (4) coincide sustancialmente con un valor 65 (304) predeterminado.
8. Procedimiento según la reivindicación 6 o 7, caracterizado por que la distribución de luz se puede variar en la dirección horizontal y la posición cero corresponde a una orientación de la distribución de luz en la dirección de marcha en una calzada recta.
9. Procedimiento según una de las reivindicaciones 6 a 8, caracterizado por que el primer elemento de sensor (P; S) 5 se fija por unión geométrica con respecto al componente móvil (B; 12) asignado o con respecto al componente fijo (F; 14) asignado.
Patentes similares o relacionadas:
Proyector de vehículo, del 6 de Marzo de 2019, de PSA Automobiles SA: Proyector de vehículo, que comprende al menos una fuente luminosa dispuesta en una carcasa de proyector para emitir luz y al menos […]
 MÉTODO Y DISPOSITIVO ELECTROMECÁNICO DE ESTABILIZACIÓN DE LA ILUMINACIÓN DELANTERA DE UNA MOTOCICLETA, del 12 de Noviembre de 2015, de SÁEZ LÓPEZ, Rubén: Método y dispositivo electromecánico para la estabilización de la iluminación delantera de una motocicleta con un dispositivo iluminador […]
MÉTODO Y DISPOSITIVO ELECTROMECÁNICO DE ESTABILIZACIÓN DE LA ILUMINACIÓN DELANTERA DE UNA MOTOCICLETA, del 12 de Noviembre de 2015, de SÁEZ LÓPEZ, Rubén: Método y dispositivo electromecánico para la estabilización de la iluminación delantera de una motocicleta con un dispositivo iluminador […]
DISPOSITIVO DE FARO CON PLACA PIVOTANTE, ESPECIALMENTE PARA VEHÍCULO AUTOMÓVIL, del 21 de Julio de 2011, de VALEO VISION: Dispositivo de faro que incluye al menos: - una fuente luminosa que emite señales luminosas hacia una superficie de salida del dispositivo […]
PROCEDIMIENTO DE REFERENCIAMIENTO DINAMICO DE UN DISPOSITIVO DE ALUMBRADO EQUIPADO CON UN MOTOR PASO A PASO., del 1 de Diciembre de 2006, de VALEO VISION: Procedimiento de referenciado de un conjunto proyector que comprende un dispositivo proyector móvil alrededor de un eje de rotación […]
PROYECTOR QUE COMPRENDE UN CORRECTOR DE LA ORIENTACION EN ESPECIAL PARA VEHICULO AUTOMOVIL., del 1 de Marzo de 2004, de VALEO VISION: LA PRESENTE INVENCION SE REFIERE A UN FARO , PARTICULARMENTE PARA VEHICULO, QUE TIENE UNA ALOJAMIENTO CERRADO POR UN CRISTAL Y UN ESPEJO […]
ACCIONADOR ROTATIVO., del 1 de Enero de 2004, de AUXILIAR DE COMPONENTES ELECTRICOS S.A.: Accionador rotativo, del tipo de los empleados para posicionar cualquier tipo de dispositivo, como por ejemplo climatizadores y focos de los automóviles, […]
DISPOSITIVO DE MANDO DE LA POSICION DE UNA PARTE MOVIL, DE UN FARO DE VEHICULO AUTOMOVIL., del 1 de Enero de 2004, de VALEO VISION: La invención se refiere a un dispositivo de control de la posición de una parte móvil de un proyector de vehículo automóvil, que comprende un vástago […]
 FARO PARA VEHICULOS, del 1 de Noviembre de 2008, de HELLA KG HUECK & CO.: Faro para vehículos con una carcasa, con sendos módulos (1 y 2) de luz de cruce y de luz de carretera dispuestos en el interior de la carcasa, con dispositivos (3, 4 y 5) de […]
FARO PARA VEHICULOS, del 1 de Noviembre de 2008, de HELLA KG HUECK & CO.: Faro para vehículos con una carcasa, con sendos módulos (1 y 2) de luz de cruce y de luz de carretera dispuestos en el interior de la carcasa, con dispositivos (3, 4 y 5) de […]