EXPLORACIÓN LÁSER PARA ROBOT DE AMARRE.
Un escáner de contornos (100) para localizar una zona objetivo (112) sobre un contorno de un barco (110),
adecuado para el acoplamiento con un robot de amarre (104) u otro sistema de anclaje del barco, comprendiendo dicho escáner de contornos (100): a) un emisor adaptado para radiar de forma progresiva o instantánea hacia dicho barco (110); b) un receptor que proporciona una señal indicativa de la radiación incidente sobre el mismo; c) un controlador o procesador que incluye instrucciones almacenadas, para i) excitar dicho emisor y recibir dicha señal, ii) determinar la posición vertical de una zona objetivo (112) adecuada para el acoplamiento de un mencionado robot de amarre (104) u otro sistema de anclaje del barco; y iii) posicionar un robot de amarre asociado (104) u otro sistema de anclaje del barco, de acuerdo con dicha posición de la zona objetivo determinada (112)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NZ2005/000144.
Solicitante: CAVOTEC MSL HOLDINGS LIMITED.
Nacionalidad solicitante: Nueva Zelanda.
Dirección: UNIT 9, LEVEL 1 AMURI PARK 404 BARBADOES STREET CHRISTCHURCH NUEVA ZELANDA.
Inventor/es: MONTGOMERY, PETER JAMES.
Fecha de Publicación: .
Fecha Solicitud PCT: 24 de Junio de 2005.
Clasificación Internacional de Patentes:
- B63B21/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › Aparatos de maniobra; Aparatos de desplazamiento, remolque o empuje; Anclaje (anclaje dinámico B63H 25/00; equipos para embarque en costas, puertos o en otras estructuras marinas fijas, p.ej. para aterrizaje, E02B).
- G01S17/88 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
- G05D1/02C
Clasificación PCT:
- G01S13/88 G01S […] › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › Sistemas de radar o análogos especialmente adaptados para aplicaciones específicas (prospección o detección electromagnética de objetos, p. ej. detección de campo cercano, G01V 3/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2361526_T3.pdf
Fragmento de la descripción:
CAMPO DE LA INVENCIÓN
La presente invención se refiere a la exploración de contornos para localizar una zona de fijación de un barco para fijar un robot de amarre al barco.
TÉCNICA ANTERIOR
En la técnica se conocen diversos sistemas para ayudar al procedimiento, manual habitualmente, de atracar un barco para la carga y la descarga. Por ejemplo, la solicitud de patente japonesa número 2 000 292 540 describe un sistema para proporcionar un medio tal que puede medir la velocidad de atraque de un barco mediante detectar el barco automáticamente, a bajo coste y con una construcción relativamente simple. Un detector láser instalado en un muelle está montado en una placa giratoria para controlar la dirección del detector y, en el momento de la exploración, la placa giratoria cambia el ángulo del detector en la dirección vertical, dentro del eje del rango de movimiento del eje del haz de láser, entre un eje de irradiación del haz de láser a lo largo del cual puede ser detectada la posición de un barco en marea alta, y otro eje de irradiación del haz de láser a lo largo del cual puede ser detectada la posición del barco en marea baja, de manera que el detector puede detectar el barco cambiando el eje de irradiación del haz de láser del detector, incluso cuando la posición en el barco cambia en la dirección vertical. A continuación, se mide la velocidad de atraque del barco fijando el eje de irradiación del haz de láser en la posición en la cual el detector detecta el barco. Cuando se ha omitido la medición mientras el barco se acerca a lo largo del muelle, la posición del barco se detecta desplazando de nuevo el detector.
En otro ejemplo, la publicación de patente de Estados Unidos número 6 023 665 describe un sistema para la detección, la identificación y el acoplamiento de una aeronave, que utiliza impulsos láser para obtener el contorno de un objeto en la distancia. El sistema explora inicialmente el área frente a la puerta de embarque hasta que localiza e identifica un objeto. Una vez se conoce la identidad del objeto, el sistema sigue al objeto. Utilizando la información a partir del contorno, el sistema puede mostrar en tiempo real el tipo de aeroplano, la distancia desde el punto de parada y la posición lateral del aeroplano.
En otro ejemplo, la publicación de patente japonesa número 4 303 706 describe un sistema para detectar la posición de una embarcación, que cambia debido al flujo y reflujo de la marea, y a la cantidad de descarga de material a granel en el trabajo de descarga de la embarcación, en tiempo real sin contacto y sin mucho esfuerzo. Un telémetro láser está acoplado a un equipamiento de manipulación de la carga, tal como un descargador. Se hace que un haz de luz explore subiendo y bajando en dirección a una embarcación que se está aproximando a un embarcadero. Entre los resultados de las mediciones de distancias, el valor que indica la distancia más corta resulta ser la distancia hasta la parte de esquina del lado transversal de la embarcación. Por lo tanto, la distancia horizontal y la distancia vertical de la embarcación con respecto al equipo de manipulación de la carga pueden calcularse en función de la distancia y del ángulo hacia arriba y hacia abajo del haz. Cuando se controla el equipo de manipulación de la carga, con la distancia horizontal y la distancia vertical como datos operativos, el equipo puede manejarse de manera que la parte de contacto en la punta del equipo de manipulación de la carga, y similares, no golpee contra el fondo de la embarcación.
En otro ejemplo, la publicación de patente de Estados Unidos número 3 594 716 describe un sistema en el que un sistema de atraque de barcos utiliza transductores de transmisión y recepción para desarrollar señales desplazadas en frecuencia por efecto Doppler, indicativas de los componentes de velocidad a lo largo de ejes de la embarcación en concreto. Las señales son convertidas a su forma digital, y procesadas para entregar información de la velocidad y la dirección a lo largo de los ejes detectados. La información de la velocidad se corrige para compensar variaciones en las características de propagación acústica del medio oceánico.
En otro ejemplo, la publicación de patente de Estados Unidos número 3 690 767 describe un sistema de atraque para grandes buques oceánicos, que comprende un sistema de radar de rango de impulsos láser, con un transmisor y receptor de láser, un retroreflector, y óptica de recepción y transmisión. Se disponen dos sistemas de este tipo en un muelle. Los retroreflectores se disponen en la proa y en la popa de un barco. Los sistemas láser comparten un medidor de intervalos temporales, un ordenador y un panel de visualización. El láser sigue los retroreflectores cuando la embarcación se aproxima al muelle, y se mide el intervalo temporal entre los impulsos transmitidos y recibidos. Se realizan los cálculos, y se muestran continuamente la velocidad del barco aproximándose, su distancia desde el muelle y la posición del barco en relación con el muelle. A continuación, esta información es transmitida al capitán de la embarcación.
En otro ejemplo, la publicación de patente de Estados Unidos número 3 707 717 describe un sistema que ha sido dispuesto para generar señales de comandos de corrección en relación con el perfil de la velocidad de atraque de un vehículo aproximándose a una posición de atraque. Un sistema de radar Doppler que comprende un transceptor radar proyecta señales entre la posición de atraque y el vehículo, y en respuesta genera señales de frecuencia de desplazamiento Doppler, indicativas de la velocidad del vehículo y del desplazamiento relativo del mismo. Un contador radar con un cómputo inicial predeterminado almacenado en el mismo, indicativo de las condiciones de atraque iniciales anticipadas, responde a las señales de desplazamiento de frecuencia contando hacia atrás desde el cómputo inicial, en función del desplazamiento Doppler. Se incluyen medios para actualizar el contador radar de acuerdo con las condiciones reales, e incluye un detector sónico que lanza periódicamente señales sónicas entre el vehículo y la posición de atraque, y genera en respuesta señales de cómputo corregido, de acuerdo con la energía sónica reflejada, indicativa de la distancia real del vehículo a la posición de atraque. Se utilizan medios que transfieren periódicamente las señales de cómputo corregidas al contador radar, corrigiendo errores entre las condiciones iniciales reales y predeterminadas. Un generador del perfil de velocidad responde a la salida del contador radar y genera un perfil programado de la velocidad de atraque deseada, el cual un comparador responde al generador del perfil de velocidad y al contador, para la generación de señales de comando indicativas de cualquier discrepancia entre el perfil real de atraque del vehículo, y el deseado.
En otro ejemplo, la publicación de patente de Estados Unidos número 3 754 247 describe un aparato de visualización que produce una representación de una embarcación, una línea que representa un atraque previsto e indicadores cuya separación de la línea de marcador del atraque representan la desviación de la velocidad de aproximación de una parte asociada de la embarcación, respecto de un valor determinado por un generador de función que genera una función óptima a partir de las señales que representan la distancia de la parte de la embarcación al atraque.
En otro ejemplo, la publicación de patente de Estados Unidos número 4 340 936 describe un sistema de ayuda a la navegación que incluye un microprocesador con dispositivos periféricos de memoria y que está programado mediante una memoria de solo lectura, incluyendo el sistema detectores para medir parámetros variables, y conmutadores del pulgar para insertar datos fijos conocidos, y calculando el microprocesador a partir de la lectura de dichos parámetros y datos, datos necesarios para la navegación óptima teniendo en cuenta factores tales como la deriva, y la velocidad y el rumbo de la corriente, teniendo el sistema conmutadores para seleccionar qué datos se muestran cuando los conmutadores se pulsan secuencialmente, y estando acompañados los datos mostrados, por índices alfa que identifican de manera exclusiva cada valor numérico mostrado.
En otro ejemplo, la publicación de patente de Estados Unidos número 5 274 378 describe un sistema indicador de la velocidad relativa, para ayudar al atraque de barcos, que utiliza un detector radar que proporciona una señal de la velocidad relativa, indicativa de la velocidad relativa entre una embarcación... [Seguir leyendo]
Reivindicaciones:
1. Un escáner de contornos (100) para localizar una zona objetivo (112) sobre un contorno de un barco (110), adecuado para el acoplamiento con un robot de amarre (104) u otro sistema de anclaje del barco, comprendiendo dicho escáner de contornos (100):
a) un emisor adaptado para radiar de forma progresiva o instantánea hacia dicho barco (110); b) un receptor que proporciona una señal indicativa de la radiación incidente sobre el mismo; c) un controlador o procesador que incluye instrucciones almacenadas, para
i) excitar dicho emisor y recibir dicha señal,
ii) determinar la posición vertical de una zona objetivo (112) adecuada para el acoplamiento de un mencionado robot de amarre (104) u otro sistema de anclaje del barco; y iii) posicionar un robot de amarre asociado (104) u otro sistema de anclaje del barco, de acuerdo
con dicha posición de la zona objetivo determinada (112).
2. Un escáner de contornos (100) acorde con la reivindicación 1, en el que dicho controlador o procesador incluye instrucciones almacenadas para posicionar un tope de fijación de un robot de amarre (104) u otro sistema de anclaje del barco, de acuerdo con dicha zona objetivo determinada (112), estando adaptado dicho tope de fijación para acoplar con dicha zona objetivo (112).
3. Un escáner de contornos (100) acorde con cualquiera de las reivindicaciones precedentes, en el que dicho emisor es un emisor láser.
4. Un escáner de contornos (100) acorde con cualquiera de las reivindicaciones precedentes, en el que dicho controlador recibe dicha señal y convierte los datos de coordenadas polares contenidos en la misma, a coordenadas cartesianas.
5. Un escáner de contornos (100) acorde con la reivindicación 4, en el que dichas coordenadas cartesianas comprenden un contorno en sección transversal.
6. Un escáner de contornos (100) acorde con la reivindicación 5, en el que dicho controlador diferencia dichas coordenadas cartesianas para determinar un contorno derivado con bordes.
7. Un escáner de contornos (100) acorde con la reivindicación 2, en el que dichas instrucciones almacenadas son para posicionar el tope en una zona objetivo (112) sobre el barco (110), para evitar cualesquiera salientes o aberturas en el flanco de dicho barco (110).
8. Un escáner de contornos (100) acorde con la reivindicación 6, en el que dichos bordes se definen como cualquier parte de dicho contorno derivado, que tienen una derivada por encima de un umbral predeterminado.
9. Un escáner de contornos (100) acorde con la reivindicación 8, en el que dicha zona objetivo (112) está entre el borde más alto y cualquier borde intermedio significativo.
10. Un escáner de contornos (100) acorde con cualquiera de las reivindicaciones 8 ó 9, en el que dicha zona objetivo (112) está a una distancia predeterminada de dicho borde intermedio.
11. Un escáner de contornos (100) acorde con cualquiera de las reivindicaciones precedentes, en el que dicho escáner (100) actualiza periódicamente la posición de dicha zona objetivo (112).
12. Un escáner de contornos (100) acorde con cualquiera de las reivindicaciones precedentes, en el que se determinan, a partir de dicha señal, cualesquiera uno o más seleccionados de los siguientes: a) la borda (108),
b) el cintón (114), y c) el nivel de la marea (106).
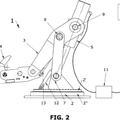
13. Un robot (104) de amarre montado en una instalación de amarre, para amarrar un barco flotante (110) adyacente a dicha instalación de amarre, incluyendo dicho robot (104) de amarre:
a) un tope con succión a posicionar sobre el flanco de dicho barco flotante (110), b) accionadores para desplazar dicho tope con succión en relación con dicha instalación de amarre,
c) un escáner de contornos (100) acorde con cualquiera de las reivindicaciones precedentes, para controlar dichos accionadores con objeto de que lleven a cabo, por lo menos, una colocación vertical controlada de dicho tope con succión.
14. Una instalación de amarre para barcos flotantes (110), que incluye por lo menos un robot de amarre (104) acorde con la reivindicación 13.
15. Un método de amarre de un barco flotante (100) que utiliza una instalación de amarre acorde con la reivindicación 14, que comprende
a) accionar el escáner de contornos (100) para explorar el casco de un barco (110)
b) permitir cualquier ajuste en la posición vertical de dicho tope con succión, en respuesta al escáner de contornos (100)
c) acoplar al tope con succión al casco de dicho barco (110)
d) succionar el tope con succión al casco de dicho barco (110).
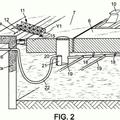
16. Un método acorde con la reivindicación 15, en el que antes de la succión de dicho tope con succión, el escáner de contornos (100) explora asimismo la superficie de agua adyacente a dicha instalación de amarre, para determinar el estado del mar, en el que la succión de dicho tope con succión se produce hasta una presión de succión mínima correlacionada con el estado del mar.
17. Un método como el reivindicado en la reivindicaciones 15 ó 16, en el que antes de acoplar dicho tope a dicho casco, el escáner de contornos (100) explora asimismo la superficie del agua de una masa de agua mareal adyacente a la instalación de amarre, para permitir la determinación del estado de la marea de dicha masa de agua mareal, en el que la colocación vertical de dicho tope con succión depende del estado de la marea.
18. Un método de amarre de un barco flotante (110) utilizando una instalación de amarre acorde con la reivindicación 14, comprendiendo dicho método las etapas de
a) excitar un emisor;
b) recibir una señal reflejada desde dicho emisor
c) determinar la posición vertical de una zona objetivo (112) adecuada para el acoplamiento de un mencionado robot (104) de amarre u otro sistema de anclaje del barco; y
d) situar un robot (104) de amarre u otro sistema de anclaje del barco, de acuerdo con la posición de la zona objetivo determinada (112).
Patentes similares o relacionadas:
Ancla marina, del 24 de Junio de 2020, de Michael Arthur Baker, Donna Ann Baker And New Zealand Trustees Services Limited: Un ancla, que comprende: • una carcasa sustancialmente no conductora, que incluye una serie de aberturas de pinza; • unos torones elásticos flexibles; […]
Dispositivo de sujeción de cables de amarre hidráulico, sistema y método, del 3 de Junio de 2020, de ShoreTension Holding B.V: Un sistema de amarre hidráulico que comprende al menos dos dispositivos de sujeción de cables de amarre hidráulicos (14a, b), ubicados en un […]
Dispositivo de amarre para un vehículo submarino, sistema de amarre y base de recuperación, del 11 de Diciembre de 2019, de NAVAL GROUP: Dispositivo de amarre para un vehículo submarino provisto de un dispositivo de enganche , comprendiendo el dispositivo de amarre un […]
 Unidad de amarre para amarrar un barco, del 25 de Septiembre de 2019, de EUROPEAN INTELLIGENCE B.V: La unidad de amarre para amarrar un barco, la unidad de amarre comprende una base , un brazo montado sobre la base y un gancho soportado por el brazo […]
Unidad de amarre para amarrar un barco, del 25 de Septiembre de 2019, de EUROPEAN INTELLIGENCE B.V: La unidad de amarre para amarrar un barco, la unidad de amarre comprende una base , un brazo montado sobre la base y un gancho soportado por el brazo […]
Línea de anclaje para soporte flotante que comprende un dispositivo elástico, del 15 de Mayo de 2019, de IFP ENERGIES NOUVELLES: Línea de anclaje para soporte flotante que comprende al menos un dispositivo elástico caracterizada porque dicho dispositivo elástico comprende: - un primer […]
Dispositivo para la fijación de cuerpos flotantes, del 3 de Diciembre de 2018, de Dual Docker GmbH: Dispositivo para la fijación de cuerpos flotantes , en particular embarcaciones y pasarelas, a un cuerpo de desembarco con al menos dos árboles de sujeción formados […]
 Amarre flotante móvil, del 5 de Octubre de 2018, de Marantier, Frédéric M: Amarre flotante móvil que incluye al menos un conjunto de n barreras flotantes paralelas, siendo n un número entero mayor que 1 y comprendiendo cada barrera flotante […]
Amarre flotante móvil, del 5 de Octubre de 2018, de Marantier, Frédéric M: Amarre flotante móvil que incluye al menos un conjunto de n barreras flotantes paralelas, siendo n un número entero mayor que 1 y comprendiendo cada barrera flotante […]
Dispositivo para sujetar cuerpos flotantes, del 18 de Octubre de 2017, de Dual Docker GmbH: Dispositivo para sujetar cuerpos flotantes , en particular pantalanes y barcas, con al menos un pantalán flotante con al menos un cuerpo de sustentación […]