Exoesqueleto robotizado vestible para brazo humano.
La presente invención se refiere a un exoesqueleto robotizado accionado por cables y mecanismos paralelos de reducido peso y volumen,
permitiendo al usuario moverse cómodamente y realizar terapias médicas, ayudas a la realización de fuerzas del tipo ortésico, actividades relacionadas con prácticas deportivas o entrenamientos especializados que requieran secuencias de movimientos o ayuda para las tareas cotidianas.
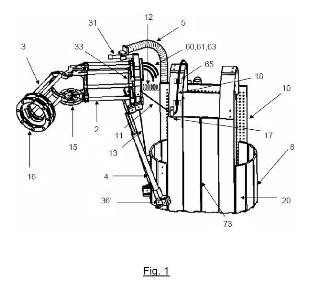
El sistema está formado por un chaleco (8), al cual están adosados el exo-brazo (2), el exo-antebrazo (3), una estructura de cinemática paralela del hombro que permite efectuar un seguimiento de los desplazamientos del hombro respecto al cuerpo, un sistema de compensación del peso (4, 5) del conjunto articulado, accionamientos de potencia (6) que permiten mover de manera controlada el brazo articulado, un sistema de alimentación autónomo y una unidad de control basada en computador (1) en la que residirán los procedimientos de control de movimiento, que pueden ser programados, tele-operados o coordinados.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201131435.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: SALTAREN PAZMIÑO,Roque Jacinto, VARELA SANZ,Jesús.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61F5/01 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 5/00 Procedimientos o aparatos ortopédicos para el tratamiento no quirúrgico de huesos o articulaciones (instrumentos o procedimientos quirúrgicos para el tratamiento de huesos o articulaciones, dispositivos especialmente adaptados al efecto A61B 17/56 ); Dispositivos para proporcionar los cuidados adecuados (vendajes, apósitos o compresas absorbentes A61F 13/00). › Dispositivos ortopédicos, p. ej. dispositivos para inmovilizar o para ejercer presiones de forma duradera para el tratamiento de los huesos fracturados o deformados, tales como férulas, yesos ortopédicos o bragueros/tirantes.
- A61H1/02 A61 […] › A61H APARATOS DE FISIOTERAPIA, p. ej. DISPOSITIVOS PARA LOCALIZAR O ESTIMULAR LOS PUNTOS EN DONDE SE LOCALIZAN LOS CUERPOS; RESPIRACION ARTIFICIAL; MASAJE; DISPOSITIVOS DE BAÑO PARA USOS TERAPEUTICOS O HIGIENICOS PARTICULARES O PARA PARTES DETERMINADAS DEL CUERPO (electroterapia, magnetoterapia, radioterapia, terapia por ultrasonidos A61N). › A61H 1/00 Aparatos para el ejercicio pasivo (A61H 5/00 tiene prioridad ); Aparatos vibradores; Dispositivos quiroprácticos, p. ej. dispositivos para aplicar impactos al cuerpo, dispositivos externos para estirar o alinear de forma ligera los huesos no fracturados . › Aparatos para ejercicios de extensión o flexión.
- B25J9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores de control programado.
Fragmento de la descripción:
Exoesqueleto robotizado vestible para brazo humano.
Campo de la invención
La presente invención se engloba dentro del campo de medicina de rehabilitación, equipos de entrenamiento deportivo, robótica de cinemática paralela y robots asistenciales. En concreto, la invención se refiere a exoesqueletos que se pueden superponer al brazo de una persona para proporcionarle asistencia en rehabilitación, en entrenamiento deportivo, o en la vida diaria, ayudando a mover los brazos, según patrones de movimiento destinados a conseguir su rehabilitación o entrenamiento o la ejecución de los movimientos diarios más frecuentes.
Antecedentes de la invención
En la actualidad, los robots de rehabilitación que existen en el mercado internacional se pueden clasificar en:
1. Robots fijos: Son de gran tamaño, peso e inercias. Necesitan estar anclados a una silla, al suelo o a una pared. Su apariencia es la de un robot industrial que rodea al usuario que suele estar sentado. El paciente no se puede desplazar.
2. Robots tipo jaula: Es una estructura esquelética de habitación de cuyos extremos salen cables que controlan la posición del brazo del paciente, tumbado en una camilla en el centro. Es una estructura fija, muy voluminosa que se instala en centros hospitalarios.
3. Robots tipo joystick: El usuario agarra con la mano un elemento, que puede envolver o no su muñeca y lo desplaza en un área de trabajo reducida. Un ordenador situado frente a él reproduce los movimientos realizados de forma simplificada (acercamiento o alejamiento de puntos).
4. Exoesqueletos. Son robots que se colocan sobre el brazo para aumentar su fuerza o para hacer rehabilitación. La mayoría de los modelos conocidos presentan grandes estructuras mecánicas y disponen de grandes actuadores de potencia para moverlas. Algunos son robots de cuerpo completo para soportar el peso del robot. Las versiones que sólo cubren la parte superior del cuerpo, son el maestro que permite controlar a un robot externo esclavo. Sólo utilizables por personas sanas.
Las principales deficiencias o desventajas y problemas no resueltos de estos modelos son:
- Gran volumen: Dificulta la movilidad en los entornos humanos e impide llevarlo a casa o a diario con el paciente.
- Gran peso: Un exoesqueleto pesado no es apto para pacientes que tienen los músculos débiles o personas mayores.
- Apariencia industrial: Un robot grande atemoriza. Además estigmatiza a su usuario. Su aspecto imposibilita su uso diario en los entornos en que la persona se mueve habitualmente.
- Complejidad: Los elementos de alta precisión, materiales caros, y mecanismos complejos impiden su aplicación doméstica. El reto es conseguir una solución eficaz y sencilla.
- Articulación del hombro: Casi todos los sistemas robóticos tratan el hombro como una junta esférica, pero en realidad su comportamiento no es este. El hombro no mantiene una posición fija ni un eje o centro del giro fijo. Se desplaza arriba-abajo y delante-detrás, cambiando así el centro de giro durante los movimientos.
En 1995 Marc D. Taylor patentó (US5,417,643, referencia [2]) un soporte rudimentario para el brazo anclado a una silla en la que se coloca al usuario que permitía hacer ejercicios de elevación y rotación del brazo con fines de rehabilitación. Desde entonces ha habido una tendencia clara en diseño de robots de rehabilitación a situar al paciente en una silla de ruedas o fija y colocarlo junto al robot que moverá su brazo. A este tipo de robots, que llamaremos "robots fijos", corresponden diseños como el divulgado en la patente US6,007,500 [8] de 1999, el divulgado en la referencia [9] de 2003, el ARMin, ARMin II, ARMin III de la universidad de Zurich [3] de 2007, o el robot de TSAI de la Universidad Nacional de Taiwan [4] del 2010.
En 1998, Mark E. Rosheim presentó una de las primeras patentes de exoesqueleto moderno, US5,845,540-B1 [6]. Se trata de un sistema maestro-esclavo en el cual un operador humano se coloca sobre el cuerpo el exoesqueleto y lo usa como joystick maestro para manejar un robot esclavo. A este tipo, "Exoesqueletos maestro-esclavo", corresponden el divulgado en la patente 5,845,540 [5] patentado en 2001 por el Instituto de Ciencia y Tecnología de Seúl y el modelo patentado por Schiele, Andre Visentin, Gianfranco, EP1364755-B1 [1], presentado dos años después para aplicaciones espaciales.
El producto ReoTherapy ReoGo de Motorika [11] del 2009 es un joystick de gran tamaño, que llega desde el suelo hasta la altura de la mano de una persona sentada en una silla de ruedas. El usuario mueve la palanca y un programa de ordenador muestra en una pantalla el movimiento de un punto que representa su mano. Le propone objetivos que el usuario debe alcanzar motivándolo mediante el juego de ordenador a ejecutar movimientos.
El MacARM [12] de Intelligent automation Inc del 2005 es un robot fijo de tipo jaula. El paciente se tumba en una camilla en el interior y unos cables desde las esquinas de la jaula desplazan su brazo por el espacio con fines de rehabilitación. Las invenciones [15] y [16] son relativas al "Sistema para entrenamiento bilateral" que consiste en una gran plataforma inclinada que se fija sobre una mesa o superficie plana. El paciente agarra unas manivelas y estas mueven las manos del paciente en movimientos deslizantes hacia delante y detrás. El sistema no es portable, ni exoesquelético. Corresponde al tipo "robot fijo".
La patente de referencia [1], EP1364755-B1, del 2003 es un exoesqueleto para brazo con 16 grados de libertad pensado para aplicaciones espaciales, concebido como un sistema maestro para dar órdenes a un robot esclavo para trabajos de mantenimiento en el espacio, devolviendo una realimentación de fuerzas (tipo joystick) que contribuya a manejar al robot esclavo con comodidad. Tiene mecanismos complejos como la unidad de actuación telescópica, un alto número de actuadores, sistemas de pretensado ajustables y muchos cables recorriendo el exoesqueleto para controlar las numerosas juntas. Su diseño no está bien adaptado a la rehabilitación, ni al entrenamiento, ni al uso por personas con debilidad motora. Para estas aplicaciones se requiere un sistema ligero, que pueda conseguir gran movilidad. La presente invención lo consigue con tan sólo 5 actuadores, y usando elementos ligeros, de reducido volumen y fácilmente ocultables. Además consigue un seguimiento correcto del movimiento del hombro gracias a la estructura paralela del hombro, y dispone de un sistema de compensación del peso del brazo que no tiene la patente EP1364755-B1, por estar concebida para ser movida por un brazo humano y no para mover el brazo.
La solicitud de patente PCT/ES2009/070305 titulada "Brazo robótico para el control del movimiento del brazo" [10] pertenece al grupo de "robots fijos" en una versión particular que sitúa al paciente sobre una camilla hospitalaria. El robot va anclado al techo y toma el brazo por su parte más alejada del cuerpo. Como todos los robots fijos no son aptos para acompañar a un paciente que se desplaza.
El exoesqueleto RUPERT [19] del que existen ya tres versiones, es un exoesqueleto actuado por sistemas neumáticos, con cuatro grados de libertad, uno en el hombro, dos en el codo y otro en la muñeca. Las principales debilidades de esta solución son que no lleva compensación de gravedad, que sólo dispone de un grado de libertad en el hombro, lo que hace inviable seguir a esta articulación en un rango normal de movimientos y la presencia de actuación neumática que obliga a conectarse a una fuente externa de aire a presión, que reduce su independencia y movilidad y lo hace ruidoso y difícil de ocultar a la vista.
La patente US7,862,524-B2 de referencia [7] es un exoesqueleto para el brazo para fines de rehabilitación del hombro que consta de potentes actuadores de potencia y voluminosas reductoras de tipo "harmonic drive" emplazadas directamente en las uniones de los eslabones que componen la estructura. Por su diseño es un sistema pesado, y que lógicamente necesita que los actuadores sean grandes, que no se pueden esconder y genera importantes pesos e inercias que complican el control del movimiento del brazo. Se distingue prácticamente de todos los modelos anteriores por tener una articulación torso-hombro que no aparece en ningún otro modelo. Esto supone un paso importante en la resolución del problema del hombro, pero sólo considera el desplazamiento del hombro en el plano frontal y fundamentalmente en vertical, lo que constituye una solución incompleta.
Hasta hoy...
Reivindicaciones:
1. Exoesqueleto robotizado vestible para brazo humano, que comprende:
- una exo-muñeca, que comprende al menos un anillo (21, 22, 23) para soportar la muñeca del usuario y permitir su giro;
- un exo-antebrazo (3), unido a la exo-muñeca y encargado de soportar el antebrazo del usuario;
- un exo-brazo (2) encargado de soportar el brazo del usuario, unida al exo-antebrazo (3) mediante una articulación móvil (15) para permitir el giro del codo del usuario;
- una unión del exo-brazo (2) con la plataforma móvil del hombro para permitir la rotación del brazo en el hombro;
- una pluralidad de cables de tracción (67) para forzar el movimiento de cada articulación;
- una pluralidad de actuadores de potencia (6, 206) para actuar los cables de tracción (67);
caracterizado por que comprende:
- medios portadores (8) para ser portados por el usuario y encargados de soportar los actuadores de potencia (6, 206);
- una estructura de cinemática paralela del hombro, encargada de proporcionar la movilidad del brazo con respecto al hombro y de efectuar un seguimiento de los desplazamientos del hombro respecto al cuerpo, que comprende al menos una pluralidad de cables (11, 13) que conectan un soporte de brazo (33), que actúa como plataforma móvil de la estructura de cinemática paralela, con los medios portadores (8), que actúan como plataforma base de la estructura de cinemática paralela.
2. Exoesqueleto robotizado vestible para brazo humano según la reivindicación 1, caracterizado por que la estructura de cinemática paralela del hombro comprende un sistema de compensación de gravedad, formado por una pluralidad de muelles (4, 5) que conectan el soporte de brazo (33) y los medios portadores (8) para soportar parcial o totalmente el peso del brazo del usuario.
3. Exoesqueleto robotizado vestible para brazo humano según la reivindicación 2, caracterizado por que el sistema de compensación de gravedad comprende al menos uno de los siguientes:
- un par de amortiguadores inferiores (4) que soportan el brazo por delante y por detrás del mismo, apoyándose en dos puntos situados en la parte inferior de los medios portadores (8).
- un muelle superior (5) anclado, en vertical cerca de una hombrera, a los medios portadores (8) y unido por el otro extremo al soporte del brazo (33).
4. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones anteriores, caracterizado por que la exo-muñeca está formada por tres anillos (21, 22, 23) concéntricos, disponiendo el anillo central (22) de forma de polea para guiar un cable tractor (56) y poder rotar sobre su eje para girar la muñeca del usuario en sentido horario o antihorario.
5. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones anteriores, caracterizado por que tanto el exo-antebrazo (3) como el exo-brazo (2) comprenden, para mantener el brazo del usuario sujeto al exoesqueleto, una rejilla con forma de semicilindro, unos acolchamientos y unas fijaciones mediante bandas elásticas para sujetar el conjunto y distribuir la presión por todo el brazo.
6. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones anteriores, caracterizado por que la estructura de cinemática paralela del hombro comprende:
- un cable de tracción hacia abajo (13), encargado de forzar el movimiento del brazo hacia abajo, que se divide en una pluralidad de tendones para equilibrar el movimiento y obtener puntos de anclaje (130) sobre el soporte base (33) desplazados lateralmente.
7. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones anteriores, caracterizado por que la estructura de cinemática paralela del hombro comprende:
- un cable de tracción (11) encargado de actuar sobre el brazo desde la parte delantera para forzar el movimiento del brazo hacia adelante, y
- un muelle (12) anclado por detrás del brazo a la espalda de los medios portadores (8,10), para forzar el movimiento del brazo hacia atrás.
8. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones 1 a 7, caracterizado por que la estructura de cinemática paralela del hombro comprende:
- un cable de tracción encargado de actuar sobre el brazo desde la parte trasera para forzar el movimiento del brazo hacia atrás, y
- un muelle anclado por delante del brazo a los medios portadores (8, 10) para forzar el movimiento del brazo hacia adelante.
9. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones anteriores, caracterizado por que la rotación del brazo en el hombro se efectúa mediante una cualquiera de las siguientes formas:
- mediante dos cables (60, 61) que trabajan en oposición;
- mediante un cable y un muelle.
10. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones anteriores, caracterizado por que la rotación de la muñeca se efectúa mediante una cualquiera de las siguientes formas:
- mediante dos cables de tracción;
- mediante un cable de tracción (63) y un muelle (51).
11. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones anteriores, caracterizado por que la rotación del codo se efectúa mediante una cualquiera de las siguientes formas:
- mediante dos cables de tracción (62, 64) trabajando en oposición;
- mediante un cable de tracción y un muelle.
12. Exoesqueleto robotizado vestible para brazo humano según la reivindicación anterior, caracterizado por que la articulación del codo comprende:
- dos piezas móviles (26, 29) con un eje de giro común (39), la primera pieza móvil (26) formando parte del exo-antebrazo (3) y la segunda pieza móvil (29) del exo-brazo (2);
- unos topes (43) para evitar que el codo pueda girar hacia atrás más allá de una posición límite;
- una polea (40), unida solidariamente a la primera pieza móvil (26), que permite el accionamiento de la articulación del codo a través de dos cables de tracción (62, 64).
13. Exoesqueleto robotizado vestible para brazo humano según la reivindicación anterior, caracterizado por que comprende:
- un encoder ubicado en la polea (40) para determinar el ángulo que relaciona la posición de la primera pieza móvil (26) respecto a la segunda pieza móvil (29);
- un sensor inercial (114) en el exo-brazo (2) para determinar su inclinación;
- un sensor inercial (113) en el exo-antebrazo (3) para, junto con la información del encoder de la polea (40), determinar la posición del exo-antebrazo (3).
- un sensor inercial (112) sobre la hombrera de los medios portadores (8) para determinar la posición relativa del brazo respecto al cuerpo del usuario.
14. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones 1 a 12, caracterizado por que los medios portadores comprenden un chaleco (8).
15. Exoesqueleto robotizado vestible para brazo humano según la reivindicación anterior, caracterizado por que los medios portadores comprenden adicionalmente una mochila (10).
16. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones anteriores, donde los actuadores de potencia se seleccionan de entre los siguientes:
- actuadores lineales (106);
- actuadores rotacionales (6);
- una combinación de los anteriores.
17. Exoesqueleto robotizado vestible para brazo humano según la reivindicación anterior, donde los actuadores de potencia rotacionales (6) ejercen su tracción sobre el cable mediante una polea (80) con un surco helicoidal (84) que permite conducir el cable en su recogida.
18. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones anteriores, caracterizado por que comprende una pluralidad de dedales de sensores externos (100, 101, 102, 103, 105, 106) ubicados en el propio exoesqueleto para activar los actuadores de potencia (6, 206) y así comandar los movimientos del mismo.
19. Exoesqueleto robotizado vestible para brazo humano según la reivindicación anterior, caracterizado por que cada dedal de sensores externo comprende un conjunto de cinco sensores (93, 94, 95, 96, 97) incluidos en el interior (98) de un dedal (99).
20. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones 18 a 19, caracterizado por que los dedales de sensores externos se disponen en pares de dedales (100, 101; 102, 103; 105, 106) con funciones opuestas.
21. Exoesqueleto robotizado vestible para brazo humano según cualquiera de las reivindicaciones 18 a 20, caracterizado por que dispone de medios de almacenamiento de datos, medios de entrada para selección de un modo de funcionamiento del exoesqueleto y de una unidad de control configurada para, en función de dicha selección, seleccionar uno de los siguientes modos de funcionamiento del exoesqueleto:
- modo de grabación de trayectorias, para registrar los movimientos realizados por el exoesqueleto en los medios de almacenamiento de datos;
- modo de seguimiento de trayectoria grabada, para seleccionar una trayectoria deseada, previamente grabada en los medios de almacenamiento de datos, y repetir dicha trayectoria de manera automática o permitir que el usuario intente seguirla y corregirle cuando se salga de ella;
- modo de seguimiento de sensores externos, para permitir el control del movimiento del exoesqueleto a través de los sensores externos.
Patentes similares o relacionadas:
SISTEMA ROBOTIZADO PORTATIL PARA REHABILITACION FUNCIONAL ASISTIDA DE ARTICULACIONES, del 31 de Julio de 2020, de Gogoa Mobility Robots, S.L: 1. Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de: a) un actuador […]
Dispositivo de estiramiento de fascia plantar y tendón de aquiles, del 29 de Julio de 2020, de RODRÍGUEZ SANZ, David: 1. Dispositivo de estiramiento de la fascia plantar y el tendón de Aquiles caracterizado porque comprende una pieza semicircular como apoyo del pie con dos […]
Dispositivo exoesqueleto de movilidad de piernas con un mecanismo de accionamiento mejorado que emplea un acoplamiento magnético/eléctrico, del 22 de Julio de 2020, de Parker-Hannificn Corporation: Un dispositivo de movilidad que comprende: un conjunto de accionamiento que incluye un miembro de accionamiento rotatorio ; un componente accionado […]
SISTEMA ROBOTIZADO PORTÁTIL PARA LA REHABILITACIÓN FUNCIONAL ASISTIDA DE ARTICULACIONES, del 9 de Julio de 2020, de Gogoa Mobility Robots, S.L: Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de un actuador compuesto por […]
Aparato de terapia, del 8 de Julio de 2020, de Lime Medical GmbH: Aparato de terapia para realizar un movimiento continuo, pasivo y/o asistido activamente de los dedos y del pulgar de la mano de un paciente, que comprende: […]
Sistema electromédico automatizado y método de gestión relacionado, del 1 de Julio de 2020, de Lauro Group S.r.l: Sistema electromédico automatizado para tratar, curar, analizar y monitorizar una pluralidad de condiciones médicas relacionadas con la columna […]
DISPOSITIVO DE REHABILITACIÓN PARA LAS EXTREMIDADES INFERIORES, del 25 de Junio de 2020, de HOSPITAL SANT JOAN DE DEU: El dispositivo de rehabilitación para las extremidades inferiores comprende un suspensor para colocar un arnés para un usuario del dispositivo de rehabilitación […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]