Un procedimiento de evaluación en vuelo de la ausencia de aleteo de un avión.
Un procedimiento implementado por ordenador para la evaluación en vuelo de la ausencia de aleteo de un avión,
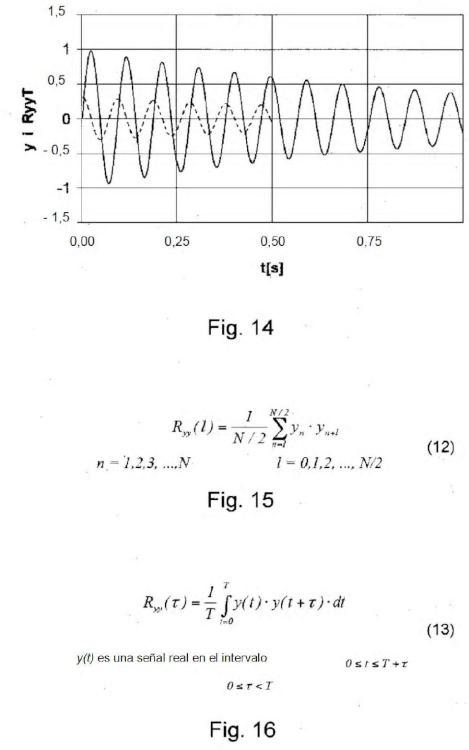
que implica el análisis de las vibraciones estructurales del avión, en base a señales no estacionarias que tienen una duración finita, indicadas por sensores situados en la estructura del avión, en el que los cálculos son realizados en tiempo real, en base a datos de mediciones actuales recogidos desde los sensores, y en el que, para datos de mediciones a partir de sensores individuales, se determinan formas modales de vibraciones, determinando para cada forma modal una frecuencia natural (f), un coeficiente de amortiguación (x), una fase (j) y una amplitud (A), usando el procedimiento de mínimos cuadrados de errores de señales temporales, en el que la importancia de las modalidades de vibraciones se determina restando de la señal de vibraciones la modalidad específica de vibraciones y calculando el valor de la disminución en la suma de restos de cuadrados, caracterizado porque las vibraciones son evaluadas analizando estimaciones de la función de auto-correlación para señales de vibraciones operativas, en el que la función de auto-correlación Ryy(l) se calcula multiplicando un número constante de muestras, preferiblemente N / 2, de la señal de vibraciones (yn), por segmentos sucesivos de la señal de vibraciones (yn), teniendo la señal de vibraciones un tamaño de N muestras, y sumando los resultados de acuerdo a la ecuación:**Fórmula**
a fin de obtener una función de auto-correlación Ryy(l) con la longitud de una mitad del segmento evaluado de vibraciones, manteniendo a la vez los valores de los coeficientes de amortiguación de las señales no estacionarias que tienen una duración finita.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11461543.
Solicitante: Instytut Lotnictwa w Warszawie.
Nacionalidad solicitante: Polonia.
Dirección: Al. Krakowska 110/114 02-256 Warszawa POLONIA.
Inventor/es: NIEPOKÓLCZYCKI,ANTONI, LENORT,FRANCISZEK, KRÓLIKOWSKI,ROBERT, SZMIDT,MICHAL, KUCIO,PAWEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01H1/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01H MEDIDA DE VIBRACIONES MECANICAS O DE ONDAS ULTRASONORAS, SONORAS O INFRASONORAS. › Medida de vibraciones en sólidos utilizando la conducción directa al detector (G01H 9/00, G01H 11/00 tienen prioridad).
- G01M7/00 G01 […] › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › Ensayo de vibraciones de estructuras; Ensayo de resistencia al choque de las estructuras (G01M 9/00 tiene prioridad).
PDF original: ES-2547128_T3.pdf




Fragmento de la descripción:
Un procedimiento de evaluación en vuelo de la ausencia de aleteo de un avión
La presente invención se refiere a un procedimiento de evaluación en vuelo de la ausencia de aleteo de un avión.
Las vibraciones por aleteo son vibraciones aero-elásticas auto-excitadas de una estructura de avión durante el vuelo. A ciertas velocidades de vuelo, las fuerzas aerodinámicas relacionadas con el movimiento vibratorio, por ejemplo, de un ala, pueden, para propiedades específicas de rigidez masiva de la construcción, provocar el desarrollo de vibraciones, por ejemplo, formas de vibraciones por torsión-flexión , lo que lleva a la destrucción del avión.
Las regulaciones de la aviación requieren ejecutar evaluaciones del aleteo en vuelo para aviones nuevos, a fin de documentar que el avión está libre de aleteo. Actualmente, las evaluaciones de aleteo se realizan de modo tal que los datos son recogidos desde sensores de vibración situados en partes de la estructura del avión durante vuelos de prueba y, posteriormente, después de que el vuelo ha terminado, se obtienen los resultados del análisis de los datos. Los procedimientos conocidos no admiten la evaluación en vuelo de la ausencia de aleteo. Un proceso de ese tipo consume tiempo y es caro, dado que permite obtener conclusiones solamente después de que el vuelo ha terminado, y ejecutar evaluaciones para velocidades mayores del avión solamente durante el próximo vuelo de prueba.
La evaluación del aleteo en vuelo debería demostrar y documentar que el avión está libre de aleteo dentro de todo el intervalo de velocidades y altitudes planeadas. Esto se demuestra proporcionando valores de coeficientes de amortiguación para las modalidades de vibración de la estructura del avión que sean relevantes para el aleteo.
Un avión aprobado para el servicio debe ser resistente al aleteo. Se supone que el avión está adecuadamente construido en términos de aleteo si los coeficientes de amortiguación para las modalidades relevantes de vibración son mayores que cero y no menores que £ = 0,015. Este valor significa físicamente que las vibraciones excitadas, auto- atenuantes, por ejemplo, de un ala, deberían atenuarse en una reducción de amplitud de alrededor del 10% para cada periodo de vibración en todo el intervalo de condiciones de vuelo aprobadas.
Los procedimientos conocidos para la evaluación de coeficientes de amortiguación de aleteo implican la excitación artificial de vibraciones y el análisis posterior al vuelo de estas vibraciones para vuelos con velocidades consecutivamente crecientes. Se usan excitaciones de impulso, armónicas o estocásticas. Esto requiere el montaje de aparatos de medición en el avión, aumenta los costes de evaluación y alarga el tiempo de evaluación.
Las vibraciones por aleteo tienen un carácter de señales no estacionarias, es decir, sus propiedades espectrales varían en el tiempo - las variaciones pueden concernir a la amplitud, la frecuencia y la fase. La variación en el tiempo de los parámetros de vibración espectral puede ser auto-excitada o artificialmente excitada.
Uno de los procedimientos para la evaluación en vuelo del aleteo de un avión implica vibraciones de la estructura del avión que son excitadas por impulso usando activadores de cohetes. Las respuestas de impulso son analizadas a fin de determinar las formas de la modalidad de la vibración y sus coeficientes de amortiguación. La excitación de impulso se entiende como una excitación con una fuerza de entre 200 y 2.000 N durante entre 10 y 50 milisegundos. Una respuesta de impulso ejemplar de un avión en vuelo se muestra en la Fig. 1. Las respuestas de impulso se miden con sensores de vibración.
Los procedimientos habituales permiten la determinación adecuada de propiedades espectrales medias de una señal para periodos de tiempo relativamente largos. La Transformada Rápida de Fouñer se usa normalmente con este fin. Sin embargo, los típicos algoritmos de la Transformada Rápida de Fouñer son adecuados para el análisis de segmentos largos de una señal y para altas frecuencias, del orden de miles de Hz. Por lo tanto, no son adecuados para las típicas vibraciones de aleteo de un avión, que tienen una frecuencia de hasta varias decenas de Hz. Por tanto, existe la necesidad de mejorar el procedimiento del cálculo de la Transformada Rápida de Fouñer a fin de lograr una resolución mejorada en intervalos inferiores de frecuencias.
Además, ha sido demostrado teóricamente que la respuesta de impulso de un objeto monitoñzado puede ser sustituida con una función de auto-correlación (también llamada una auto-correlación) de una señal estocásticamente excitada. Suponiendo que las vibraciones de las alas o de un plano de cola de un avión durante el vuelo tengan las propiedades de vibraciones estocásticamente excitadas, los coeficientes de amortiguación pueden ser estimados en base al análisis de las estimaciones de la función de auto-correlación (y la estimación de la función de auto-correlación). Las siguientes publicaciones se refieren a este tema:
- Uhl T., Llsowski W., Kurowski P.: Análisis modal en funcionamiento y sus aplicaciones, Katedra Robotyki y Dynamiki Masyn. Akademia Górniczo-Hutnicza w Krakowie. Kraków 2001.
- Hermans L., Van der Auweraer H.: Sobre el uso de funciones de auto-correlación y correlación cruzada para extraer parámetros modales de datos de solo salida. En los Anales de la 6a conferencia internacional sobre avances recientes
en la dinámica estructural. Artículo de trabajo en curso, Universidad de Southampton, RU, 1997.
Hay procedimientos conocidos para calcular la estimación de la auto-correlación para señales estacionarias. Sin embargo, estos procedimientos cambian los valores de coeficientes de amortiguación de la señal de origen de las vibraciones efectivas.
Hay ecuaciones usadas normalmente para calcular la función de correlación para procesos estacionarios, ergódicos y estocásticos con el uso de una única ejecución del proceso estocástico, suficientemente extendido en el tiempo. Una función de auto-correlación de un proceso y(t) puede ser calculada usando la ecuación (1) mostrada en la Fig. 2.
Un proceso estacionario tiene un valor medio constante my en el tiempo y una varianza constante en el tiempo. Un proceso estacionario es ergódico cuando los promedios temporales son iguales a los promedios conjuntos sobre el intervalo de la realización de procesos estocásticos.
Sin embargo, las ecuaciones anteriores son aplicables a una señal de vibración infinitamente larga. Una función de auto-correlación de una señal de ese tipo preserva las frecuencias y los coeficientes de amortiguación modal del objeto evaluado.
Sin embargo, durante las mediciones en vuelo, los segmentos medidos de las vibraciones son siempre finitos. Las estimaciones de la función de auto-correlación de tales señales cambian sus coeficientes de amortiguación. En tales casos, las estimaciones existentes de la función de auto-correlación introducen errores metódicos, relacionados inequívocamente con estimaciones individuales. El análisis de las señales de vibraciones efectivas introduce además errores resultantes de errores de medición y del hecho de que las excitaciones de vibraciones en vuelo no son exactamente un ruido blanco estacionario.
El artículo "Aplicación de una técnica de prueba de vuelo y de análisis de datos para el aleteo de un avión drone" de Robert M. Bennett et al (Memorando técnico de la NASA 83136, 1 de mayo de 1981, páginas 1 a 10, XP55030869, Hampton, Virginia 23665, EE UU) presenta resultados de identificación modal que fueron obtenidos a partir de pruebas de aleteo de un vehículo drone con un ala de investigación, estando equipado con un sistema de supresión de aleteo (FSS). La frecuencia y la amortiguación de varias modalidades están determinadas por un análisis modal del dominio del tiempo de la función de respuesta de impulso obtenida por transformaciones de Fourier de datos, a partir de la excitación de ondas sinusoidales velozmente barridas por las superficies de control del FSS sobre el ala. El procedimiento usado corresponde a las etapas indicadas en el preámbulo de la presente reivindicación 1.
Una solicitud de patente coreana KR20080000713 presenta un procedimiento para analizar datos de pruebas de vuelos de aleteo. Una señal de acuerdo a una situación de prueba es recibida desde un avión de pruebas. Un auto- valor de los datos es calculado mediante un algoritmo de identificación de sistemas sub-espaciales.
Una solicitud de patente estadounidense US2004267478 presenta un procedimiento para analizar datos de pruebas de aleteo usando el ajuste de curvas sinusoidales amortiguadas.
... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento implementado por ordenador para la evaluación en vuelo de la ausencia de aleteo de un avión, que implica el análisis de las vibraciones estructurales del avión, en base a señales no estacionarias que tienen una duración finita, indicadas por sensores situados en la estructura del avión, en el que los cálculos son realizados en 5 tiempo real, en base a datos de mediciones actuales recogidos desde los sensores, y en el que, para datos de mediciones a partir de sensores individuales, se determinan formas modales de vibraciones, determinando para cada forma modal una frecuencia natural (f), un coeficiente de amortiguación ©, una fase (<p) y una amplitud (A), usando el procedimiento de mínimos cuadrados de errores de señales temporales, en el que la importancia de las modalidades de vibraciones se determina restando de la señal de vibraciones la modalidad específica de vibraciones y calculando el 10 valor de la disminución en la suma de restos de cuadrados, caracterizado porque las vibraciones son evaluadas analizando estimaciones de la función de auto-correlación para señales de vibraciones operativas, en el que la función de auto-correlación Ryy(l) se calcula multiplicando un número constante de muestras, preferiblemente N / 2, de la señal de vibraciones (yn), por segmentos sucesivos de la señal de vibraciones (yn), teniendo la señal de vibraciones un tamaño de N muestras, y sumando los resultados de acuerdo a la ecuación:
j N/2
^yy ~ Y / o y n yn*l
HC « = 1,2,3,...,N 1 = 0,1,2..........N/2
1 O
a fin de obtener una función de auto-correlación Ryy(l) con la longitud de una mitad del segmento evaluado de vibraciones, manteniendo a la vez los valores de los coeficientes de amortiguación de las señales no estacionarias que tienen una duración finita.
2. El procedimiento de acuerdo a la reivindicación 1, caracterizado porque la función de auto-correlación Ryy(l) se 20 calcula con el uso de una Transformada Rápida de Fourier, de acuerdo a la ecuación
p» í-0,1,2.3,...
Tm0 «* W Wt» j - i. I s,A1
W} =FFT£>,1)}
ÍT(i) - Ff Tftpf»}]
ypói) "j# para n ** L 2f 5,N/2 ypM * 0 Para n * W2*lr N
en las que n = 1, 2, 3,N N = 2Í, en la que i es un número natural.
3. El procedimiento de acuerdo a la reivindicación 2, caracterizado porque el segmento muestreado de una señal con una longitud de N muestras es rellenado con ceros a fin de obtener una secuencia de salida con la longitud de NSUma =
25 2', en la que i es un número natural y la Transformada Rápida de Fourier se calcula para la secuencia de salida.
4. El procedimiento de acuerdo a la reivindicación 2, caracterizado porque la Transformada Rápida de Fourier se calcula usando tablas de valores de funciones seno y coseno, para ángulos dependientes del número de muestras y de la frecuencia de muestreo, preparados después del comienzo del sistema.
5. El procedimiento de acuerdo a la reivindicación 1, caracterizado porque se genera una imagen que visualiza las
vibraciones medidas por los sensores, como la imagen que comprende una imagen de la estructura del avión (101) y sus desviaciones (111) resultantes de las vibraciones, mientras que las desviaciones con parámetros por encima de valores de umbral están marcadas con un color distinto al color de las desviaciones con parámetros por debajo de valores de umbral.
5 6. El procedimiento de acuerdo a la reivindicación 5, caracterizado porque las vibraciones son visualizadas usando un
procedimiento que implica el cálculo de un desplazamiento de fase, o un procedimiento que implica el cálculo de una fase de movimiento en puntos especificados en el tiempo.
7. Un sistema de medición para la evaluación en vuelo de la ausencia de aleteo de un avión equipado con sensores de vibraciones situados en la estructura del avión, caracterizado porque el sistema comprende circuitos de
10 procesamiento de señales para realizar las etapas de procedimiento de acuerdo a las reivindicaciones 1 a 6.
8. Un programa de ordenador que comprende código de programa para realizar todas las etapas del procedimiento de acuerdo a las reivindicaciones 1 a 6 cuando el programa es ejecutado en un ordenador.
Patentes similares o relacionadas:
EQUIPO PARA EL ANÁLISIS DEL ESPECTRO DE VIBRACIÓN EN MATERIALES, del 5 de Marzo de 2020, de UNIVERSIDAD EAN: La invención se refiere a un escáner por vibraciones que incluye una base estática y una base amortiguada dentro de la cual se pondrá el objeto a analizar. La base estática […]
Procedimiento para la regulación de un motor de accionamiento de un vehículo con una determinación de velocidad y dispositivos, del 4 de Septiembre de 2019, de ROBERT BOSCH GMBH: Procedimiento para la regulación de un motor de accionamiento de un vehículo , el cual al menos comprende un sensor de vibraciones y una rueda […]
 Sistema y procedimiento para proteger máquinas rotatorias, del 31 de Julio de 2019, de GENERAL ELECTRIC COMPANY: Un procedimiento para identificar una condición de desequilibrio dentro de una máquina rotatoria que comprende un rotor en un entorno de mucho ruido, comprendiendo el […]
Sistema y procedimiento para proteger máquinas rotatorias, del 31 de Julio de 2019, de GENERAL ELECTRIC COMPANY: Un procedimiento para identificar una condición de desequilibrio dentro de una máquina rotatoria que comprende un rotor en un entorno de mucho ruido, comprendiendo el […]
Estimación de interferencia y ruido en un sistema OFDM, del 11 de Abril de 2019, de QUALCOMM INCORPORATED: Un procedimiento para estimar el ruido en un sistema de multiplexación por división de frecuencia ortogonal, OFDM, , el procedimiento que comprende: […]
Procedimiento y dispositivo para el análisis de vibraciones así como base de datos de patrones para ello y utilización de una base de datos de patrones, del 7 de Marzo de 2019, de Qass GmbH: Procedimiento para el análisis de vibraciones, en el que se detectan y evalúan las vibraciones producidas durante el uso de un componente, en […]
Procedimiento de valoración de ruidos molestos, del 27 de Febrero de 2019, de BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT: Procedimiento de valoración de ruidos molestos en vehículos automóviles, en el que se dividen los ruidos producidos durante un tiempo de medida prefijado […]
Procedimiento y dispositivo para el monitoreo de estado de palas de rotor, del 27 de Febrero de 2019, de Wölfel Engineering GmbH + Co. KG: Procedimiento para el monitoreo de estado de palas de rotor de aerogeneradores, evaluándose señales de al menos un sensor, monitoreándose los cambios de al menos una frecuencia […]
Monitorización de una máquina con un componente de máquina rotatorio, del 19 de Noviembre de 2018, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para la monitorización de una máquina con un componente de máquina rotatorio, registrándose de manera automatizada - en tiempos de medición sucesivos […]