Estimación de posición de rotor basada en resonancia.
Sistema de prueba (200) para una máquina de polos salientes (230),
estando adaptado el sistema deprueba (200) para generar una orden de pulso de prueba para aplicar un pulso de prueba de tensión a undevanado de fase de la máquina (230), comprendiendo el sistema de prueba
un circuito de medición (240) adaptado para determinar una respuesta de resonancia amortiguada despuésde la finalización del pulso de prueba de tensión, momento en el que al menos se desacopla un terminal deun devanado de fase de la máquina, y
un procesador (250) adaptado para derivar del mismo una posición de un rotor de la máquina de polossalientes (230)
en el que el circuito de medición está adaptado para determinar la influencia del intercambio de energíaentre una inductancia de máquina de polos salientes y una capacitancia parásita (312) de la máquina depolos salientes y los componentes de generador de pulsos de prueba de tensión en la respuesta deresonancia amortiguada.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/057125.
Solicitante: INVERTO NV.
Nacionalidad solicitante: Bélgica.
Dirección: Jacques Parijslaan 8 9940 Evergem BELGICA.
Inventor/es: VAN DEN BOSSCHE, ALEX, GELDHOF,KRISTOF.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › mediante la variación de la inductancia, p. ej. mediante una armadura móvil.
- H02P25/08 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 25/00 Disposiciones o métodos para el control de motores de corriente alterna caracterizados por la clase de motor de corriente alterna o por detalles estructurales. › Motores de reluctancia.
- H02P6/16 H02P […] › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › Circuitos para detección de la posición.
PDF original: ES-2391879_T3.pdf
Fragmento de la descripción:
Estimación de posición de rotor basada en resonancia
Campo técnico de la invención
La presente invención se refiere al campo de maquinaria tal como por ejemplo motores eléctricos. Más particularmente, la presente invención se refiere al campo de control y accionamiento de la maquinaria, tal como por ejemplo máquinas eléctricas de polos salientes. El método y los sistemas pueden aplicarse en un gran número de campos, por ejemplo en la generación de energía avanzada.
Antecedentes de la invención
Con el fin de controlar los estados de movimiento de una maquina eléctrica saliente de una manera estable, se requiere medir la posición de rotor. Esto puede conseguirse montando dispositivos mecánicos tales como codificadores o resolutores en el árbol de la máquina o colocando sensores Hall o bobinas exploradoras dentro de la máquina. Debido a importantes variaciones de temperatura dentro de la máquina, así como a vibraciones mecánicas, estos sensores pueden fallar, reduciendo por consiguiente la fiabilidad de la máquina controlada. Por este motivo, además de reducir el coste y el cableado adicional, los estados de movimiento se estiman en vez de medirse.
Existe un gran número de sistemas de estimación de posición de rotor. Un primer conjunto a modo de ejemplo de los métodos de estimación de posición usa un circuito LC, que consiste en una inductancia dependiente de la posición L de una fase de motor inactiva y un condensador externo C bien conocido. Luego, se aplica una tensión de alta frecuencia a la fase de motor mediante un acoplamiento capacitivo o inductivo. La frecuencia impuesta coincide con la frecuencia resonante del circuito LC para una determinada posición de rotor. Cuando un rotor en movimiento alcanza esta posición, el valor complejo de la impedancia de circuito se caracteriza por una amplitud máxima y fase nula. Por tanto, siguiendo la amplitud o la fase de la impedancia de circuito, puede detectarse cuándo el rotor alcanza una posición predeterminada. Un sistema o método de estimación de posición de este tipo requiere un circuito de excitación externo.
Otra categoría a modo de ejemplo de los métodos de estimación de posición se basa en la excitación de una fase de motor inactiva con pulsos de tensión y la medición de la pendiente de corriente resultante. Esta pendiente es proporcional a la inductancia incremental de la fase y, por tanto, contiene la información de posición de rotor. Estos métodos generan un par motor de perturbación debido a la amplitud no despreciable de la corriente generada por los pulsos de tensión.
El documento JP2000-083393 describe un sistema para detectar la posición de un rotor detectando la posición del rotor de un valor de frecuencia de una frecuencia de resonancia generada por un circuito oscilante.
El documento DE10322447 describe un dispositivo de medición de posición para mover de manera lineal o rotacional los componentes basándose en una disposición de doble bobina y un circuito de oscilación eléctrico.
Sumario de la invención
Un objeto de las realizaciones de la presente invención es proporcionar un buen aparato o métodos para controlar máquinas eléctricas de polos salientes. Una ventaja de las realizaciones según la presente invención es que puede obtenerse una estimación fiable de la posición de un rotor en una máquina de polos salientes y/o un control fiable de las máquinas de polos salientes. Una ventaja es que el sistema de control según las realizaciones de la presente invención es fiable, incluso en severas condiciones medioambientales, tales como por ejemplo en presencia de polvo, humedad, vibraciones fuertes o alta temperatura. De este modo, una ventaja es que usando el método sin sensor, el malfuncionamiento de un sensor de posición de árbol mecánico no puede dar lugar a una determinación de posición de rotor inexacta o un control inexacto de la máquina de polos salientes.
Una ventaja de las realizaciones según la presente invención es que se proporciona un sistema y/o método de control sin sensor para determinar una posición de rotor en una máquina de polos salientes, es decir sin la necesidad de un sensor de posición de árbol externo. Debe observarse que en la presente invención, sin sensor significa sin la necesidad de un sensor mecánico.
Los métodos y sistemas de control según las realizaciones de la presente invención pueden aplicarse en una variedad de campos, tales como por ejemplo en aplicaciones del consumidor como en compresores, ventiladores, acondicionamiento de aire, frigoríficos, lavadoras, equipo para automóviles, etc. pero también en aplicaciones industriales más avanzadas tales como equipo de manipulación, bobinadoras, elevadores, etc. y en vehículos eléctricos y/o híbridos, etc. y en aplicaciones de alta fiabilidad tales como aplicaciones aeroespaciales.
Una ventaja de las realizaciones según la presente invención es que se obtiene la información de la posición de rotor, no sólo para posiciones alineadas del rotor y el estator, sino también para posiciones intermedias. De este modo, una ventaja es que los sistemas y métodos pueden usarse para aplicaciones de alta dinámica.
Una ventaja de las realizaciones según la presente invención es que puede obtenerse la información de posición de rotor sin el uso de un hardware de excitación externo. Debe observarse que el sistema puede usar un hardware de excitación externo, tal como por ejemplo un circuito analógico sencillo para generar órdenes periódicas para el inversor para generar pulsos de prueba. También una ventaja de las realizaciones según la presente invención es que puede usarse un circuito de medición relativamente fácil, por ejemplo en comparación con un circuito para la medición de una magnitud de impedancia máxima o de una fase de impedancia nula. Una ventaja de las realizaciones según la presente invención es que no se requiere ningún procesamiento de señal complejo.
Una ventaja de las realizaciones según la presente invención es que pueden evitarse problemas de compatibilidad electromagnética, por ejemplo problemas de compatibilidad electromagnética que se producen en la inyección de una señal de alta frecuencia sostenida.
Una ventaja de las realizaciones es que puede obtenerse una alta resolución de posición. Una ventaja de las realizaciones según la presente invención es que puede evaluarse una señal de medición grande, siendo pequeño de este modo el sistema y/o método sujeto a ruido o perturbación.
Una ventaja de algunas realizaciones según la presente invención es que la cantidad de perturbación de par motor es despreciable.
Una ventaja de las realizaciones según la presente invención es que el número de componentes requeridos para controlar las máquinas eléctricas de polos salientes es bajo. Este último da como resultado además una reducción de costes.
El objetivo anterior se cumple mediante las características de sistema en la reivindicación 1 y el método correspondiente en la reivindicación 10. Las reivindicaciones dependientes mencionan las realizaciones ventajosas y los detalles de la invención.
Breve descripción de los dibujos
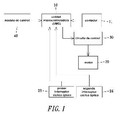
La figura 1 muestra un ejemplo de un motor de reluctancia conmutado de tres fases mediante el cual el rotor está alineado con un par de polos de estator, que puede controlarse usando un método o sistema según una realización de la presente invención.
La figura 2 muestra un ejemplo de un motor de reluctancia conmutado de tres fases mediante el cual el rotor no está alienado con un par de polos de estator, que puede controlarse usando un método o sistema según una realización de la presente invención.
La figura 3 muestra una ilustración de una forma de onda de corriente de fase (deseada) que tiene un periodo de corriente residual para accionar un motor de reluctancia conmutado de tres fases (A) y un motor CC sin escobillas de tres fases (B) , que es una categoría de sistemas que pueden controlarse usando un sistema y/o método según una realización de la presente invención.
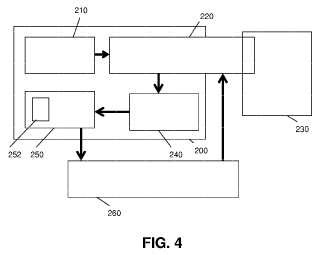
La figura 4 muestra una configuración a modo de ejemplo para un sistema para estimar la posición de rotor según una realización de la presente invención.
La figura 5 muestra un ejemplo de un puente de un convertidor de puente asimétrico que puede usarse en un sistema y/o método para controlar... [Seguir leyendo]
Reivindicaciones:
1. Sistema de prueba (200) para una máquina de polos salientes (230) , estando adaptado el sistema de prueba (200) para generar una orden de pulso de prueba para aplicar un pulso de prueba de tensión a un devanado de fase de la máquina (230) , comprendiendo el sistema de prueba
un circuito de medición (240) adaptado para determinar una respuesta de resonancia amortiguada después de la finalización del pulso de prueba de tensión, momento en el que al menos se desacopla un terminal de un devanado de fase de la máquina, y
un procesador (250) adaptado para derivar del mismo una posición de un rotor de la máquina de polos salientes (230)
en el que el circuito de medición está adaptado para determinar la influencia del intercambio de energía entre una inductancia de máquina de polos salientes y una capacitancia parásita (312) de la máquina de polos salientes y los componentes de generador de pulsos de prueba de tensión en la respuesta de resonancia amortiguada.
2. Sistema de prueba (200) según la reivindicación anterior, comprendiendo el sistema de prueba un generador de orden de pulso de prueba (210) para generar una orden de pulso de prueba para aplicar un pulso de prueba de tensión para forzar los potenciales de un devanado de fase de la máquina (230) a niveles predeterminados, comprendiendo además el sistema de prueba un generador de pulsos de prueba de tensión para generar el pulso de prueba de tensión.
3. Sistema de prueba (200) según la reivindicación 2, comprendiendo el generador de pulsos de prueba de tensión un inversor para accionar la máquina de polos salientes, donde las acciones de conmutación del inversor que acciona la máquina de polos salientes generan los pulsos de prueba de tensión.
4. Sistema de prueba (200) según cualquiera de las reivindicaciones anteriores, en el que los potenciales en el sistema de prueba se desacoplan al final del pulso de prueba de tensión para iniciar la respuesta de resonancia amortiguada al pulso de prueba.
5. Sistema de prueba (200) según cualquiera de las reivindicaciones anteriores, en el que el circuito de medición está adaptado para determinar una respuesta de resonancia amortiguada después de la finalización del pulso de prueba de tensión en la señal de accionamiento eléctrico.
6. Sistema de prueba (200) según cualquiera de las reivindicaciones anteriores, en el que el procesador (250) está adaptado para derivar un valor de signatura de posición a partir de la respuesta de resonancia amortiguada.
7. Sistema de prueba (200) según cualquiera de las reivindicaciones anteriores, que comprende además un controlador (260) para controlar el accionamiento de la máquina de polos salientes en función de la posición de rotor derivada.
8. Máquina de polos salientes que comprende una unidad de prueba según cualquiera de las reivindicaciones 1 a 7.
9. Uso de un sistema de prueba (200) según cualquiera de las reivindicaciones 1 a 7 en una máquina de polos salientes.
10. Método (400) para determinar una posición de rotor en una máquina de polos salientes, comprendiendo el método
- generar (410) una orden de pulso de prueba para aplicar un pulso de prueba de tensión a un devanado de fase de la máquina,
- determinar (420) una respuesta de resonancia amortiguada después de la finalización del pulso de prueba de tensión, momento en el que al menos se desacopla un terminal de un devanado de fase de la máquina teniendo en cuenta la influencia del intercambio de energía entre una inductancia de máquina de polos salientes y una capacitancia parásita (312) de la máquina de polos salientes y los componentes de generador de pulsos de prueba de tensión en la respuesta de resonancia amortiguada., y
- derivar (430) de la respuesta de resonancia amortiguada una posición de un rotor de la máquina de polos salientes.
11. Método (400) según la reivindicación 10, en el que la derivación de una posición de un rotor comprende
- determinar un valor de signatura de posición a partir de la respuesta de resonancia amortiguada y
- derivar una posición del rotor a partir del valor de signatura de posición.
12. Método para calibrar un sistema según cualquiera de las reivindicaciones 1 a 7, comprendiendo el método una pluralidad de posiciones de rotor (452) ,
- generar (454) una orden de pulso de prueba para aplicar un pulso de prueba de tensión a un devanado de fase de la máquina,
- determinar (454) una respuesta de resonancia amortiguada después de la finalización del pulso de prueba de tensión, momento en el que al menos se desacopla un terminal de un devanado de fase de la máquina, y derivar una relación entre la respuesta de resonancia amortiguada y la posición de rotor 10 conocida.
13. Método según la reivindicación 12, en el que la derivación de una relación comprende
- determinar un valor de signatura de posición a partir de la respuesta de resonancia amortiguada y
- derivar una relación entre el valor de signatura de posición y la posición de rotor conocida.
14. Producto de programa informático para, cuando se ejecuta en un ordenador, realizar un método según 15 cualquiera de las reivindicaciones 10 a 13.
no alineada alineada
Patentes similares o relacionadas:
MÁQUINA DE RELUCTANCIA CONMUTADA, del 24 de Octubre de 2019, de CENTRO DE INVESTIGACIONES ENERGÉTICAS, MEDIOAMBIENTALES Y TECNOLÓGICAS, O.A., M.P: Máquina de reluctancia conmutada. Siguiendo la configuración propuesta para el circuito magnético de la máquina de la presente invención, se reduce la cantidad de hierro […]
Método para sincronizar una máquina eléctrica de reluctancia síncrona, del 20 de Marzo de 2019, de KSB SE & Co. KGaA: Un método para sincronizar una máquina eléctrica de reluctancia síncrona en el que dicha máquina (E) no tiene sensores de tensión de magnetización […]
Conjunto aspirador con entrada a través de depósito extraíble, del 28 de Marzo de 2018, de SHOP VAC CORPORATION: Un conjunto aspirador que tiene: un conjunto de motor/ventilador que tiene un motor y un impulsor de aire ; una manguera […]
 PROCEDIMIENTO Y APARATO PARA CONTROL DE BAJA VELOCIDAD DE MOTORES DE RELUCTANCIA, del 13 de Marzo de 2013, de YA HORNG ELECTRONIC CO. LTD.: Se desvela un procedimiento y aparato para control de baja velocidad de motores de reluctancia, que ofrece una unidad microcontroladora (UMC), que tiene una […]
PROCEDIMIENTO Y APARATO PARA CONTROL DE BAJA VELOCIDAD DE MOTORES DE RELUCTANCIA, del 13 de Marzo de 2013, de YA HORNG ELECTRONIC CO. LTD.: Se desvela un procedimiento y aparato para control de baja velocidad de motores de reluctancia, que ofrece una unidad microcontroladora (UMC), que tiene una […]
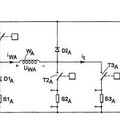 Controlador para máquinas eléctricas, del 1 de Febrero de 2013, de CG Drives & Automation Sweden AB: Un circuito de control para una máquina de reluctancia que tiene dos partes mutuamente amovibles, y al menosun devanado inductivo de fase (WA, WB, WC), cuya inductancia […]
Controlador para máquinas eléctricas, del 1 de Febrero de 2013, de CG Drives & Automation Sweden AB: Un circuito de control para una máquina de reluctancia que tiene dos partes mutuamente amovibles, y al menosun devanado inductivo de fase (WA, WB, WC), cuya inductancia […]
CONVERTIDOR DE FRECUENCIA PARA UN MEDIDOR DE RELUCTANCIA CONECTADO Y SISTEMA MECATRÓNICO, del 5 de Diciembre de 2011, de MIELE & CIE. KG: Convertidor de frecuencia, que comprende un rectificador (B1) para generar o transformar una tensión alterna en el lado de la red (UN) en una tensión […]
PROCEDIMIENTO PARA REGULAR UN MOTOR DE RELUCTANCIA, del 20 de Junio de 2011, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento para regular un motor de reluctancia con un rotor y un estator , en donde el estator presenta bobinas de estator individuales y, según […]
 PROCEDIMIENTO DE MANDO DE UN CONJUNTO DE ARRANQUE DE UN VEHÍCULO DE MOTOR TÉRMICO, del 10 de Marzo de 2011, de RENAULT SAS: Procedimiento de mando de un conjunto de arrastre de vehículo en el cual se aplica a una máquina de reluctancia variable una consigna (θptabla) de ángulo de conducción […]
PROCEDIMIENTO DE MANDO DE UN CONJUNTO DE ARRANQUE DE UN VEHÍCULO DE MOTOR TÉRMICO, del 10 de Marzo de 2011, de RENAULT SAS: Procedimiento de mando de un conjunto de arrastre de vehículo en el cual se aplica a una máquina de reluctancia variable una consigna (θptabla) de ángulo de conducción […]