EQUIPO DE OBTENCIÓN DE INFORMACIÓN EN OBRAS E INFRAESTRUCTURAS BASADO EN UN VEHÍCULO AÉREO NO TRIPULADO.
Equipo de obtención de información en obras e infraestructuras basado en vehículo aéreo no tripulado,
(UAV) que comprende, al menos:
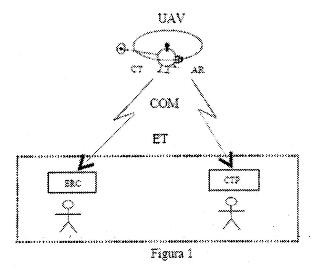
(i) un vehículo aéreo no tripulado (UAV) que comprende medios para su control y operación desde tierra, medios de adquisición y medios de registro sincronizado de imágenes y datos; y
(ii) una estación en tierra (ET) comprendiendo, a su vez, un dispositivo de radio-control, y un computador para ayuda a la operación comprendiendo medios para la planificación, construcción y mantenimiento de obras e infraestructuras, incluyendo la geo-referenciación de las imágenes, la construcción de mapas en dos y tres dimensiones, y la obtención de medidas entre puntos y rasgos característicos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200802546.
Solicitante: UNIVERSIDAD DE SEVILLA.
Nacionalidad solicitante: España.
Inventor/es: OLLERO BATURONE,ANIBAL, Ferruz Melero,Joaquin, CABALERO BENÍTEZ,FERNANDO, Merino Cabañas,Luis, Peña Ortiz,Nicolas, Maza Alcañiz,Ivan, Martinez de Dios,Ramiro.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Fotogrametría o videogrametría, p. ej. estereogrametría; Topografía fotográfica.
- G01S17/02 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio (G01S 17/66 tiene prioridad).
- G01S17/89 G01S 17/00 […] › para la cartografía o la formación de imágenes.
Fragmento de la descripción:
Equipo de obtención de información en obras e infraestructuras basado en un vehículo aéreo no tripulado.
Objeto de la invención
El objeto de la invención es un equipo para la obtención de información de interés para la planificación, construcción y mantenimiento de obras e infraestructuras, incluyendo la geo-referenciación de imágenes, realización de mapas en 2D y 3D así como la obtención de medidas de interés para monitorización y mantenimiento, comprendiendo un vehículo aéreo no tripulado.
Campo de la invención
El campo de aplicación de la invención corresponde a los sectores industriales de la construcción con objeto de planificar obras e infraestructuras, monitorizar su ejecución y realizar su mantenimiento.
Antecedentes de la invención
En la actualidad se cuenta con sistemas comerciales que permiten la aplicación de técnicas de fotogrametría empleando vehículos aéreos. Existen también procedimientos para construcción de mapas del terreno empleando sensores láser, tales como LIDAR, embarcados en aeronaves tripuladas.
El principal problema de estos sistemas es el coste ya que requieren vuelos de aeronaves tripuladas, dotadas de sistemas ópticos apropiados. Para ello suele recurrirse a empresas especializadas cuyos servicios tienen un coste relativamente elevado ya que involucran además de la propia aeronave una tripulación que, como mínimo, consta del piloto y un operador del sistema óptico.
Por otra parte, los vuelos deben realizarse en buenas condiciones atmosféricas y pueden Representar un peligro si se efectúan en condiciones de poca visibilidad o, en general, condiciones atmosféricas no idóneas.
Las aeronaves tripuladas deben volar a suficiente altura, por lo cual la resolución de las imágenes y datos adquiridos con los sensores a bordo también es limitada, dependiendo de las características de los sensores.
El auge experimentado por los vehículos aéreos no tripulados, conocidos por sus siglas en inglés UAVs (Unmanned Aerial Vehicles), ha motivado también que recientemente, en la literatura especializada, se hayan propuesto aplicaciones entre las que se incluye la realización de mapas. Sin embargo, en la mayor parte de los casos, son también vehículos costosos desarrollados para aplicaciones militares cuyo empleo para aplicaciones civiles no resulta ventajoso en la actualidad.
Con relación a la aplicación específica de realización de mapas, los procedimientos existentes se basan en el empleo de LIDAR [1][2], visión estéreo [5], o monocular.
La realización de mapas empleando exclusivamente un sensor comercial LIDAR está restringida por el volumen y el peso del sensor y requiere también una elevada precisión y estabilidad en el vuelo de la aeronave. Es posible emplear también dispositivos que estabilicen el sensor, pero dichos dispositivos son costosos e incrementan también la carga útil necesaria.
El empleo de estéreo requiere una separación suficiente de las cámaras; dado que las dimensiones del vehículo aéreo limitan tal separación, se reduce la altura posible del vuelo. Asimismo, las vibraciones, y, en general, los movimientos relativos entre el par de cámaras, dificultan o pueden impedir el establecimiento de las correspondencias estéreo.
Es también posible el empleo de la secuencia de imágenes monoculares adquirida por una cámara a bordo del UAV, estableciéndose correspondencias entre cada par de imágenes consecutivas [4] para obtener la estructura en 3D de la escena contando también con la medida de la posición y orientación desde la que se toma cada imagen [3], El procedimiento requiere de una elevada calidad de dichas medidas ya que, por ejemplo, los errores de posición darían lugar a una estimación incorrecta de la línea base que une las dos posiciones lo que generaría importantes errores en la construcción de mapas.
No se conoce ningún sistema suficientemente flexible que pueda aplicarse con sensores alternativos dependiendo de la carga útil del UAV y que en caso de disponer de la suficiente carga útil permita la mejora de la calidad del mapa y las medidas empleando técnicas de fusión sensorial.
Por otra parte no se conoce ningún sistema específico basado en vehículo aéreo no tripulado para la obtención de imágenes y datos de obras e infraestructuras que pueda ser empleado en su planificación, control de ejecución y mantenimiento, lo que es el objetivo fundamental de esta patente. En el ámbito específico de los vehículos aéreos pueden encontrarse patentes relativas a control, estructura mecánica o estimación de la posición, como por ejemplo la solicitud PCT con número WO9903407, "Sistema de a bordo para determinar la posición de un vehículo aéreo y sus aplicaciones", que propone un método probabilístico para combinar la navegación puramente inercial con los datos obtenidos mediante la detección de balizas de posición conocida. Este objetivo es claramente distinto al que persigue la presente invención.
En lo referente a construcción de mapas mediante sensores embarcados existe una patente europea con número E94110598, y título "Procedimiento para la creación de un mapa de entorno y para la determinación de una posición propia en el entorno por medio de una unidad automotriz" que propone un método optimizado para construcción de mapas, pero no se contempla el uso de vehículos aéreos, ni se proponen los sensores adecuados para llevar a cabo la realización del método en un campo concreto de aplicación. Otras patentes relacionadas con la reconstrucción 3D corresponden a problemas más específicos, que hacen uso de técnicas basadas en marcas especiales o en iluminación estructurada, como la de referencia WO9700896, "Dispositivo para realizar la medición sin contacto de una superficie tridimensional de un objeto" o en la E88310672, "Método y aparato para la determinación de distancias entre tramos de superficie de un escenario espacial tridimensional y una cámara".
Referencias
[1] Miller, R y Amidi O. (1988). 3-D Site Mapping with the CMU Autonomous Helicopter, Proceedings of the 5th International Conference on Intelligent Autonomous Sistems (IAS-5), Junio 1998.
[2] Kanade, T, Amidi, O., Ke, K. (2004). Real-Time and 3D Vision for Autonomous Small and Micro Air Vehicles, 43rd Conference on Decision and Control (CDC 2004), Diciembre 2004.
[3] Hartley, R.I. y Zisserman (2000). A., Multiple View Geometry in Computer Vision, Cambridge University Press.
[4] Lowe, D (1999). Object recognition from local scale-invariant features. Proc. ICCV, pp. 1150-1157.
[5] Lacroix S., I.-K. Jung, A. Mallet (2002). Digital elevation map building from low altitude stereo imagery. Robotics and Autonomous Systems 41 (2-3).I 119-127.
Descripción de la invención
Para paliar los problemas arriba mencionados se presenta él sistema para obtención de información en obras e infraestructuras basado en un vehículo aéreo no tripulado, el cual comprende, al menos:
(i) un equipo basado en un vehículo aéreo no tripulado para la obtención de información de obras e infraestructuras el cual a su vez comprende, al menos:
El vehículo comprende un controlador configurable que le permite operar en cualquiera de los siguientes modos:
Reivindicaciones:
1. Sistema para la obtención de información en obras e infraestructuras basado en vehículo aéreo no tripulado (UAV) caracterizado porque comprende, al menos:
(i) un vehículo aéreo no tripulado que comprende medios para su control y operación desde tierra, medios de adquisición y medios de registro sincronizado de imágenes y datos; y
(ii) una estación en tierra comprendiendo, a su vez, un dispositivo de radio-control, y un computador para ayuda a la operación comprendiendo medios para la planificación, construcción y mantenimiento de obras e infraestructuras, incluyendo la geo-referenciación de las imágenes, la construcción de mapas en dos y tres dimensiones, y la obtención de medidas entre puntos y rasgos característicos.
2. Sistema según reivindicación 1 caracterizado porque los medios de control del vehículo aéreo no tripulado comprenden un controlador configurable y operable en un modo seleccionado entre:
3. Sistema según reivindicaciones 1 y 2 caracterizado porque el vehículo aéreo no tripulado es un helicóptero configurado para permitir el despegue y aterrizaje vertical, y vuelo estacionario.
4. Sistema según reivindicaciones anteriores caracterizado porque los medios de geo-referenciación de imágenes obtenidas mediante vehículo aéreo no tripulado reciben como entradas las Imágenes y datos adquiridos con los sensores a bordo del vehículo no tripulado y producen las imágenes geo-referenciadas.
5. Sistema según reivindicaciones anteriores caracterizado porque los medios de construcción de mapas en 2D y 3D de obras e infraestructuras tienen como entradas las imágenes y los datos de obras e infraestructuras, así como los datos de navegación del vehículo aéreo no tripulado, obtenidos con los sensores a bordo del vehículo no tripulado, y que funcionará en un modo sensorial seleccionado entre:
(i) Un primer modo sensorial comprendiendo un sistema monocular con una única cámara empleando correspondencia entre imágenes consecutivas, construcción de mosaicos y reconstrucción epipolar, resolviendo la indeterminación de escala mediante telémetro láser o coordenada GPS.
(ii) Un segundo modo sensorial comprendiendo un sistema estéreo con dos cámaras cuyas imágenes deben hacerse corresponder, empleando la línea base como referencia absoluta que resuelve la indeterminación de escala.
(iii) Un tercer modo sensorial comprendiendo un escáner láser (LIDAR) para obtener las coordenadas de los puntos que intersectan el plano de barrido con el terreno.
(iv) Un cuarto modo sensorial combinación de los anteriores.
Patentes similares o relacionadas:
DISPOSITIVO EMISOR DE RADIACION INFRARROJA PARA MARCACIÓN DE BLANCOS MÓVILES., del 18 de Marzo de 2020, de SISTEMAS DE CONTROL REMOTO, S.L: 1. Dispositivo emisor de radiación infrarroja para marcación de blancos móviles, utilizando para ello una fuente de radiación IR, emitiendo en una […]
Generador de imágenes y telémetro combinados, del 12 de Febrero de 2020, de Rafael Advanced Defense Systems Ltd: Un vehículo que comprende un generador de imágenes y un telémetro combinados (10A, 10B) que se montan en el vehículo, el generador de imágenes […]
 Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Dispositivo optoelectrónico, del 6 de Noviembre de 2019, de VISHAY SEMICONDUCTOR GMBH: Dispositivo sensor optoelectrónico con: al menos un emisor optoelectrónico y al menos un receptor optoelectrónico , un medio de almacenamiento […]
Termómetro de infrarrojos, del 21 de Agosto de 2019, de Bio Echo Net Inc: Un termómetro de infrarrojos capaz de medir una temperatura corporal sin contacto con un cuerpo humano (TG), que comprende: una unidad principal […]
Procedimiento y sistema para evitar mal funcionamiento en llamadas, del 21 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento para evitar errores de operación en llamadas por un teléfono móvil, mediante el cual el procedimiento comprende las etapas de: detectar continuamente […]
Procedimiento y dispositivo para asegurar un espacio atravesado por un haz láser de alta potencia, del 3 de Julio de 2019, de ArianeGroup SAS: Procedimiento para asegurar un espacio atravesado por un haz láser de alta potencia: caracterizado por que: • se genera al menos un haz […]
Sistema de referencia de posición y método para posicionar y seguir uno o más objetos, del 1 de Mayo de 2019, de KONGSBERG SEATEX AS: Método para posicionar y seguir uno o más objetos por medio de una unidad de transceptor fijada a una plataforma del sensor, tal como un objeto o embarcación, y uno […]