Equipo de guía y procedimiento para conducir el vuelo de aproximación de aeronaves.
Procedimiento para conducir el vuelo de aproximación de aeronaves (2),
para conducir un conjunto de aeronaves (2), una tras otra, al aterrizaje en un aeropuerto (F), mediante la fijación de una secuencia de vuelos de aproximación optimizada para reducir el impacto nocivo sobre el entorno, con tiempos de llegada previstos (tZ) para el conjunto de aeronaves (2) en tiempos de llegada previstos (tZ) predeterminados,
caracterizado por las etapas:
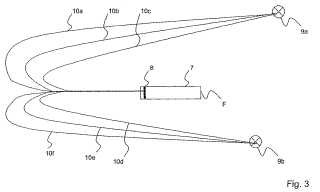
a) asignación de una posible trayectoria para el vuelo de aproximación (10) a partir del conjunto de trayectorias de vuelo de aproximación (10) predeterminadas, calculadas previamente en cuanto al impacto nocivo sobre el entorno, y que describen respectivas vías de vuelos de aproximación desde un punto de ruta de partida (9) hasta un punto de ruta de destino (8), para cada aeronave (2) en función del tiempo de vuelo restante (tR) que necesita la aeronave (2) para el tramo entre el punto de ruta de partida (9) y el punto de ruta de destino (8),
b) determinación del impacto nocivo sobre el entorno debido a la secuencia de vuelos de aproximación de aeronaves (2) utilizando la correspondiente trayectoria de vuelo de aproximación (19) asignada en función de coeficientes de impacto nocivo sobre el entorno (FRBK) predeterminados para las trayectorias de vuelo de aproximación (10) como parámetros de impacto nocivo sobre el entorno debido al vuelo de aproximación sobre la correspondiente ruta de vuelo de aproximación.
c) adaptación de la secuencia de vuelos de aproximación y repetición de las etapas a) y b) para averiguar una secuencia de vuelos de aproximación óptima con reducido impacto nocivo sobre el entorno, y
d) conducción de las aeronaves (2) en función de la secuencia de vuelos de aproximación resultante optimizada en cuanto al impacto nocivo.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07002513.
Solicitante: DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V..
Nacionalidad solicitante: Alemania.
Dirección: LINDER HOHE 51147 KOLN ALEMANIA.
Inventor/es: Temme,Marco-Michael, Helmke,Hartmut.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G08G5/02 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › Ayudas para el aterrizaje automático, es decir, sistemas en los que los datos de los vuelos de aviones que llegan son tratados para suministrar los datos de aterrizaje (ayudas al aterrizaje a bordo de aeronaves, o medidas de seguridad a bordo de la nave para evitar la colisión con la superficie de la tierra B64D 45/04; ayudas al aterrizaje visuales o acústicas en tierra o en cubierta de portaviones B64F 1/18).
PDF original: ES-2377662_T3.pdf
Fragmento de la descripción:
Equipo de guía y procedimiento para conducir el vuelo de aproximación de aeronaves La invención se refiere a un procedimiento para conducir el vuelo de aproximación de aeronaves, para conducir un conjunto de aeronaves, una tras otra, al aterrizaje en un aeropuerto, mediante la fijación de una frecuencia de vuelos de aproximación optimizada para reducir el impacto nocivo sobre el entorno.
La invención se refiere además a un equipo de guía para el control del vuelo de aproximación de aeronaves, para conducir un conjunto de aeronaves mediante un tal procedimiento, una tras otra, a al menos un punto de ruta de destino de un aeropuerto.
Debido al creciente tráfico aéreo, es cada vez más importante poner a disposición en los aeropuertos suficiente capacidad de despegue y aterrizaje para aeronaves. Pero esto da lugar por otro lado a problemas crecientes relativos al medio ambiente y a la protección frente al ruido. Debido al creciente tráfico aéreo, está sometido el entorno a un creciente impacto nocivo sobre el medio ambiente y a un mayor ruido de los vuelos. Esto afecta sobre todo a los residentes en el entorno inmediato de grandes aeropuertos internacionales y de corredores de aproximación muy frecuentados.
Existen esfuerzos para reducir el ruido de los vuelos optimizando los pasillos de aproximación y de despegue y mediante procedimientos de aterrizaje optimizados. Desde luego, incluso con modernas instalaciones de procesamiento de datos y utilizando los más modernos algoritmos de optimización no ha sido posible hasta ahora calcular en tiempo real las rutas de aproximación y despegue tal que se mantenga tan reducido como sea posible el impacto nocivo sobre el medio ambiente y el ruido de los vuelos en el entorno, en particular para los residentes.
Para reducir el impacto nocivo por el ruido de los vuelos durante el vuelo de aproximación, se conocen procedimientos de vuelo con ruido reducido, con los que se limita activamente el ruido del vuelo durante la fase de vuelo de aproximación.
Un procedimiento para vuelos de aproximación reconocido internacionalmente, por ejemplo descrito en DFS, Manual de vuelo de Alemania – Aeronautical Information Publication (AIP) Germany, manual de vuelo ampliado mensualmente, 2005, DFS Deutsche Flugsicherung GmbH (Control del tráfico aéreo alemán, S.L.) , Langen, Alemania, es el llamado “Procedimiento de Frankfurt”, también denominado Low-Drag-Low-Power-Approach (aproximación de baja resistencia/baja potencia) . El ruido del flujo del aire y el empuje del mecanismo propulsor se reducen a un mínimo, desplegando durante el vuelo de aproximación los alerones de aterrizaje y el tren de aterrizaje lo más tarde posible. En esta configuración aerodinámica puede reducirse el ruido del vuelo frente al de un vuelo estándar.
Además se conoce un procedimiento que se denomina procedimiento de vuelo descendente continuo (ContinuousDescent-Approach) . En él se renuncia en el último segmento del vuelo de aproximación a la parte horizontal del vuelo de aproximación, con lo que el aeroplano se encuentra hasta el punto de toma de tierra en un continuo vuelo descendente o de planeo. La potencia del mecanismo propulsor se ajusta entonces a marcha en vacío o casi a marcha en vacío. Con ello puede reducirse considerablemente el ruido del mecanismo propulsor que aparece en un vuelo de aproximación. Desde luego, para el procedimiento de vuelo descendente continuo es necesaria una superficie libre de vuelo suficientemente grande, ya que cada aeroplano tiene un comportamiento de vuelo descendente diferente, que depende del peso y de las características aerodinámicas. Para asegurar un vuelo descendente continuo en una secuencia de aeronaves que toman tierra uno tras otro a distancias relativamente cortas, es considerable el coste de la coordinación. El procedimiento de vuelo descendente continuo sólo puede utilizarse por lo general en momentos de poco tráfico.
Por el documento WO 02/095712 A2 se conoce un procedimiento para la gestión en el tiempo del vuelo de un conjunto de aeronaves enfrentado a un recurso especificado del sistema mediante un sistema aeronáutico. Para ello se recogen y memorizan datos y objetivos operativos especificados, cuyo valor es una medida de en qué medida los citados recursos del sistema y el conjunto de aeronaves alcanzan su destino operativo cuando los citados aeronaves cumplen con las marcas de tiempo prescritas en el vuelo de aproximación. Se calculan las trayectorias iniciales tan pronto como un aeroplano está en el aire. A continuación se determina la exactitud de la trayectoria y se realiza una optimización de la trayectoria individual del vuelo de aproximación en cuanto a la función-objetivo.
Por el documento WO 02/099769 se conoce un sistema de gestión del tráfico aéreo que realiza planes de flujo y de vuelo basados en la trayectoria. Los distintos sistemas de control, navegación y rescate se conectan entre sí con ayuda de una comunicación basada en satélite, para realizar así una planificación de la trayectoria más segura y eficiente.
En el documento Weitz, L.A. y colab.: “An Analysis of Merging and spacing operations with continuous descent approaches” (Un análisis de las operaciones de intercalación y espaciamiento con aproximaciones de descenso continuo”, Digital Avionics System Conference (Conferencia sobre sistemas de aviónica digital) 2005 se describe el procedimiento de vuelo descendente continuo (continuous descent approach) y se muestra cómo con ayuda de este procedimiento puede reducirse el impacto nocivo del ruido en el entorno de un aeropuerto. Así resulta por ejemplo la observación de que los vuelos de aproximación 2º -CDA (Continuous Descent Approach) no son tan óptimos como los vuelos de aproximación 3º -CDA. No obstante, al respecto es un inconveniente en particular que el procedimiento de vuelo descendente continuo sólo pueda aplicarse fuera de las horas de punta, ya que para el éxito del mismo ya no es posible una intervención durante el procedimiento de descenso continuo en la trayectoria.
Para la planificación de los despegues optimizada en cuanto a ruido se conocen los trabajos offline de los sistemas de optimización con los que las trayectorias de despegue de las aeronaves se configuran tal que en cuanto a un criterio relativo al ruido, aseguran un impacto nocivo mínimo sobre la población. No obstante, esto es posible sólo porque las rutas de despegue poseen una dispersión menor que las rutas de aproximación. Las rutas de despegue pueden precisamente conducirse siempre sobre trayectorias previamente fijadas con puntos de ruta y recorridos definidos.
Un tal control del despegue se describe en “Limitar el ruido de los vuelos – un objetivo empresarial de la DFS”, HRSG: DFS Deutsche Flugsicherung GmbH (Control del tráfico aéreo alemán S.L.) , Offenbach, noviembre 2000 (www.dfs.de) .
En el documento U. Isermann, O. Boguhn, C. Henkel, T. Kowalski, R. Schmid: “Procedimiento de simulación para pronosticar el ruido de los vuelos”, DLR, Köln-Porz, 16 marzo 2004 se describe un procedimiento apoyado informáticamente para calcular la emisión de ruido de los vuelos en el suelo, que tiene en cuenta los efectos físicos importantes en la propagación de las emisiones de sonidos de los aeroplanos que despegan y aterrizan. El procedimiento de pronosticar el ruido de los vuelos puede utilizarse para optimizar procedimientos de vuelo de bajo ruido. El impacto nocivo del ruido de los vuelos a nivel del suelo se calcula mediante modelos de origen y modelos de propagación del sonido. Para ello se realiza la correlación entre sí de datos de base acústicos específicos de tipos de aeroplanos, como espectro y característica direccional, así como datos de la potencia de vuelo, datos topográficos y meteorológicos, así como datos de la trayectoria de vuelo.
Una optimización en tiempo real de trayectorias de vuelos de aproximación no es posible desde luego con los procedimientos conocidos, ya que las trayectorias del vuelo de aproximación tienen una dispersión bastante más elevada que las trayectorias de los vuelos de despegue y el propio esfuerzo de cálculo necesario no pueden dominarse con los ordenadores de alta potencia actuales.
Bajo trayectorias en el sentido de la invención se entiende al respecto una trayectoria de vuelo tridimensional, caracterizada por una determinada cantidad de puntos de ruta a atravesar en vuelo durante un determinado tiempo. Una trayectoria de vuelo de aproximación se denomina por ello también ruta tetradimensional,... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para conducir el vuelo de aproximación de aeronaves (2) , para conducir un conjunto de aeronaves (2) , una tras otra, al aterrizaje en un aeropuerto (F) , mediante la fijación de una secuencia de vuelos de aproximación optimizada para reducir el impacto nocivo sobre el entorno, con tiempos de llegada previstos (tZ) para el conjunto de aeronaves (2) en tiempos de llegada previstos (tZ) predeterminados, caracterizado por las etapas: a) asignación de una posible trayectoria para el vuelo de aproximación (10) a partir del conjunto de trayectorias de vuelo de aproximación (10) predeterminadas, calculadas previamente en cuanto al impacto nocivo sobre el entorno, y que describen respectivas vías de vuelos de aproximación desde un punto de ruta de partida (9) hasta un punto de ruta de destino (8) , para cada aeronave (2) en función del tiempo de vuelo restante (tR) que necesita la aeronave (2) para el tramo entre el punto de ruta de partida (9) y el punto de ruta de destino (8) , b) determinación del impacto nocivo sobre el entorno debido a la secuencia de vuelos de aproximación de aeronaves (2) utilizando la correspondiente trayectoria de vuelo de aproximación (19) asignada en función de coeficientes de impacto nocivo sobre el entorno (FRBK) predeterminados para las trayectorias de vuelo de aproximación (10) como parámetros de impacto nocivo sobre el entorno debido al vuelo de aproximación sobre la correspondiente ruta de vuelo de aproximación.
c) adaptación de la secuencia de vuelos de aproximación y repetición de las etapas a) y b) para averiguar una secuencia de vuelos de aproximación óptima con reducido impacto nocivo sobre el entorno, y d) conducción de las aeronaves (2) en función de la secuencia de vuelos de aproximación resultante optimizada en cuanto al impacto nocivo.
2. Procedimiento según la reivindicación 1, caracterizado por la formación de una posible secuencia de vuelos de aproximación con posibles vías de vuelo de aproximación bidimensionales para cada aeronave (2) y deducción de los tiempos de llegada previstos (tz) y de los tiempos de vuelo restante (tR) que de los mismos resultan desde un punto de ruta de partida (9) hasta un punto de ruta de destino (8) para cada aeronave (2) de la secuencia de vuelos de aproximación.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado por la determinación de trayectorias de vuelos de aproximación a utilizar de manera efectiva por las aeronaves (2) en función de los tiempos de vuelo restante (tR) independientemente de la cantidad de trayectorias de vuelos de aproximación (10) predeterminadas para la secuencia de vuelos de aproximación resultante optimizada en cuanto a impacto nocivo y conducción de las aeronaves (2) en la secuencia de aterrizaje a través de las trayectorias de vuelo de aproximación determinadas, tal que los mismos tomen tierra en el umbral de la pista con los tiempos de llegada previstos (tZ) combinados con la secuencia de aterrizaje.
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado porque los coeficientes de impacto nocivo sobre el entorno (FRBK) de las trayectorias de vuelos de aproximación (10) predeterminadas se determinan en función de la topografía del terreno y/o de la densidad de población referidos a las trayectorias de vuelo de aproximación (10) .
5. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado porque los coeficientes de impacto nocivo sobre el entorno de las trayectorias de vuelo de aproximación (10) , así como el impacto nocivo sobre el entorno, se determinan en función de los tipos de aeronave y/o parámetros meteorológicos.
6. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque las trayectorias de vuelo de aproximación (10) predeterminadas presentan longitudes de trayectoria distintas entre el punto de ruta de partida (9) y el punto de ruta de destino (8) y pueden asociarse inequívocamente a los tiempos de vuelo restante (tR) .
7. Procedimiento según la reivindicación 6, caracterizado por la determinación del tiempo de vuelo restante (tR) en función del tipo de aeronave.
8. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque para dos o más puntos de ruta de partida (9a, 9b) del aeropuerto (F) fijados conjuntamente, se predetermina en cada caso un grupo de trayectorias de vuelo de aproximación (10) predefinidas por cada punto de ruta de partida (9) y punto de ruta de destino (8) comunes.
9. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque los coeficientes de impacto nocivo sobre el entorno (FRBK) describen el impacto nocivo del ruido sobre el entorno cuando se realiza un vuelo de aproximación sobre una de las trayectorias de vuelo de aproximación (10) asignada.
10. Equipo de guía (1) para conducir vuelos de aproximación de aeronaves (2) , para conducir un conjunto de aeronaves una tras otra (2) mediante el procedimiento según una de las reivindicaciones precedentes a al menos un punto de ruta de destino (8) de un aeropuerto (F) , caracterizado por -Una memoria de datos para memorizar un conjunto de trayectorias de vuelo de aproximación predefinidas, que describen en cada caso una vía de vuelo de aproximación desde un punto de ruta de partida común hasta un punto de ruta de destino del aeropuerto y coeficientes de impacto nocivo sobre el entorno asociados a las trayectorias de vuelos de aproximación como parámetros del impacto nocivo sobre el entorno debido al vuelo de aproximación sobre la correspondiente ruta de vuelo de aproximación, -una unidad de cálculo para asignar una posible trayectoria de vuelo de aproximación dentro del conjunto de trayectorias de vuelo de aproximación predeterminada para cada aeronave en función del tiempo de vuelo restante que necesita la aeronave para el recorrido entre el punto de ruta de partida y el punto de ruta de destino, la determinación del impacto nocivo sobre el entorno debido a la secuencia de vuelos de aproximación de aeronaves utilizando las correspondientes trayectorias de vuelo de aproximación asignadas en función de los coeficientes de impacto nocivo sobre el entorno de las trayectorias de vuelos de aproximación, y adaptación de la secuencia de vuelos de aproximación y repetición de los pasos correspondientes a la asignación de trayectorias de vuelo de aproximación posibles y determinación del impacto nocivo sobre el entorno, para determinar una secuencia de vuelos de aproximación optimizada con un reducido impacto nocivo sobre el entorno, y -una unidad de guía para conducir las aeronaves en función de la secuencia de vuelos de aproximación resultante optimizada en cuanto a impacto nocivo.
11. Equipo de guía (1) según la reivindicación 10, caracterizado porque la unidad de guía (6) tiene un módulo para la transmisión de datos por radio (3) para transmitir al menos señales de control que describen una trayectoria de vuelo de aproximación (10) a las aeronaves (2) .
12. Equipo de control (1) según la reivindicación 10 u 11, caracterizado porque los coeficientes de impacto nocivo sobre el entorno (FRBK) describen el impacto nocivo del vuelo sobre el entorno en vuelos de aproximación sobre una trayectoria de vuelo de aproximación (10) asignada.
Patentes similares o relacionadas:
Sistema de asistencia al pilotaje de una aeronave, en particular, de ayuda al aterrizaje, al apontaje y a la navegación, del 19 de Febrero de 2020, de THALES: Sistema de asistencia al pilotaje de una aeronave en la fase de aterrizaje o apontaje, que comprende unos medios de medición adecuados para realizar mediciones […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Priorización de instalaciones de aterrizaje alternativas en planificación de vuelo, del 20 de Febrero de 2019, de THE BOEING COMPANY: Sistema de planificación de vuelo de aeronave que comprende un procesador y una memoria configurados para: identificar un punto de decisión […]
Especificación de prestación de navegación, del 24 de Mayo de 2017, de THE BOEING COMPANY: Un método de formulación de una especificación para prestación de navegación requerida temporal y vertical, que comprende: calcular desviaciones temporales y verticales […]
Sistema para proporcionar advertencias de superación en el aterrizaje y su evitación., del 5 de Abril de 2017, de THE BOEING COMPANY: Un sistema que comprende: un sistema de determinación de pendiente de superficie configurado para medir una pluralidad de distancias entre una aeronave […]
Procedimiento de corrección de la altitud barométrica para una aeronave, del 1 de Abril de 2015, de THALES: Procedimiento de corrección de la altitud barométrica de aeronaves , caracterizado porque comprende las etapas siguientes: • una etapa previa de división […]
Procedimiento y sistema de asistencia al aterrizaje para helicópteros, del 12 de Noviembre de 2014, de Airbus Defence and Space GmbH: Procedimiento de asistencia al aterrizaje para un helicóptero, con las siguientes etapas de procedimiento: • cálculo de la zona de aterrizaje […]
Sistema de guiado de un dron en fase de aproximación a una plataforma en particular naval con vistas a su aterrizaje, del 11 de Diciembre de 2013, de DCNS: Sistema de guiado de un dron en fase de aproximación a una plataforma con vistas a su aterrizaje, quecomprende una cámara , conectada a unos medios de análisis […]