Ensamblaje de engranajes con clavija flexible asimétrica.
Un ensamblaje (10) de engranajes que comprende una pluralidad de conjuntos de engranajes planetarios fijados a un soporte (11) tipo en horquilla,
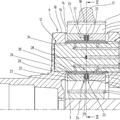
en el que cada uno de dichos conjuntos de engranajes planetarios comprende un engranaje (12) planetario soportado por un eje (14) de engranaje, presentando el eje (14) de engranaje un primero (20) y un segundo (22) extremos opuestos, siendo cada extremo soportado por un primero y un segundo cojinetes (40, 42) esféricos montados dentro del soporte (11), siendo capaz el eje (14) de engranaje de flectarse a lo largo de al menos parte de la longitud del eje (14) de engranaje cuando son aplicadas cargas torsionales y rotacionales al ensamblaje (10) de engranajes,
en el que dicho eje (14) de engranaje comprende una parte (34) intermedia genéricamente cilíndrica retenida en contacto con una superficie de contacto del engranaje (12) planetario, una primera porción (24) cónica que se extiende entre la parte (34) intermedia y el primer extremo (20), y una segunda porción (28) cónica que se extiende entre la parte (34) intermedia y el segundo extremo (22), y
en el que una primera porción (30) cóncava está definida entre el primer extremo (20) y la primera porción (24) cónica.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2010/000471.
Solicitante: Friede Goldman United, Ltd.
Nacionalidad solicitante: Islas Caimán.
Dirección: c/o Campbells Corporate Services Limited, Floor 4, Willow House, Cricket Square, PO Box 268 Grand Cayman KY1-1104 ISLAS CAIMAN.
Inventor/es: MONTESTRUC,ALFRED.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H1/28 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 1/00 Transmisiones de engranajes para transmitir un movimiento rotativo (particulares para transmitir un movimiento rotativo con relación de velocidad variable, o para invertir el movimiento rotativo F16H 3/00). › con engranajes con movimiento orbital.
- F16H57/08 F16H […] › F16H 57/00 Partes constitutivas generales de las transmisiones (de mecanismo husillo-tuerca F16H 25/00; de transmisiones por fluidos F16H 39/00 - F16H 43/00). › de las transmisiones con órgano de movimiento orbital.
PDF original: ES-2531836_T3.pdf
Fragmento de la descripción:
Ensamblaje de engranajes con clavija flexible asimétrica Antecedentes de la invención
La invención se refiere a ensamblajes de engranajes y, más concretamente, a unos conjuntos de engranajes planetarios que pueden ser utilizados en sistemas de piñón y cremallera y otros aplicaciones industriales de este tipo.
Los sistemas de engranajes planetarios se utilizan ampliamente en una pluralidad de entornos industriales. En dichos sistemas, la potencia de entrada rotacional generalmente se produce bajo la forma de un engranaje solar. Una pluralidad de engranajes planetarios está montada alrededor del engranaje solar para recibir la fuerza rotacional procedente del engranaje solar mediante la toma constante de los respectivos dientes. Tradicionalmente, los engranajes planetarios están montados en un área rotatoria de engranajes planetarios y el elemento de potencia de salida generalmente se presenta bajo la forma de una corona dentada.
Un engranaje epicíclico típico o sistema de engranajes planetarios además del engranaje solar y de una pluralidad de engranajes planetarios utiliza una corona dentada provista de unos dientes internos. La corona dentada está situada en el soporte, estando el engranaje planetario engranado con el engranaje solar y la corona dentada que discurren alrededor tanto de los engranajes planetarios como del engranaje solar. La corona dentada está típicamente engranada con todos los engranajes planetarios. De esta manera, cada engranaje planetario está engranado tanto con el engranaje solar como con la corona dentada, y con ninguno de los demás planetarios, mientras que la corona dentada y el engranaje solar están cada uno engranados con cada uno de los planetarios. Los planetarios están todos montados sobre los ejes en una relación paralela, relación que teóricamente sería retenida durante la rotación. De estos tres conjuntos de elementos, el engranaje solar, los planetarios montados sobre el soporte y la corona dentada, uno típicamente se mantendrá fijo y los demás rotarán, con potencia para rotar alimentada hacia un componente rotatorio, a unas velocidad y par angulares determinados, y la potencia tomada del otro componente rotatorio a un par y velocidad modificados relacionados linealmente o de manera inversa con el primero por la relación de transmisión.
Un problema común de los sistemas de engranajes tanto planetarios como no planetarios es la desalineación de los dos engranajes cuando sus dientes se engranan. Cuando los ejes geométricos de rotación de los engranajes no son perfectamente paralelos los contactos parciales de los dientes provocan esfuerzos de expansión y contacto sobre un extremo de un diente. En teoría, la pérdida potencial de potencia de la potencia de salida de los ensamblajes de engranajes debida a la desalineación puede ser de un 3 por ciento o superior. La situación de falta de paralelismo provoca problemas considerables en cuanto al desgaste excesivo, la fricción añadida y el ruido añadido, y un esfuerzo superior en los dientes de engranaje, lo que provoca la fatiga del metal.
Otro problema creado en el sistema de engranajes planetarios con cuatro o más engranajes planetarios es la distribución de las cargas entre los engranajes planetarios. Con el fin de obtener una mejor uniformidad de la carga, uno de los procedimientos sugeridos consiste en permitir la deformación elástica de los ejes de los engranajes planetarios y adoptar unos "montajes flexibles". Otro problema adicional surge debido a la deflexión del soporte bajo la carga, lo cual puede introducir la máxima desalineación cuando los engranajes son sometidos a una carga máxima. En dicho momento, la deformación torsional del soporte introduce la mayor desalineación debido a la deformación. Una parte considerable del gran porcentaje de reducción de la potencia normal de todos los engranajes debido a la desalineación es directamente atribuible a este hecho.
Una de las soluciones ofrecidas por la industria es utilizar un par de placas separadas rígidamente conectadas para que funcionen como soporte planetario. El diseño de doble placa permite reducir de manera significativa la deflexión del eje planetario y la desalineación. Sin embargo, los diseños de soportes de doble placa no están bien preparados para el uso de montajes flexibles para los planetarios, lo que, a su vez, les convierte en diseños deficientemente preparados para el uso de más de tres planetarios. Así mismo, los problemas de intolerancia tenderán a verse agravados por la rigidez de estos diseños.
Otro enfoque al problema se muestra en la Pat. estadounidense No. 3,33,713 concedida a R.J. Hicks en 1967. De acuerdo con la patente 3,33,713, un manguito está interpuesto entre el engranaje y el eje, sobre el cual la rueda dentada está situada. El eje presenta unas porciones terminales opuestas rígidamente fijadas entre la rueda dentada y el soporte. Se afirma que el espacio entre la rueda dentada y el soporte permite que el eje se flexione para proporcionar una carga uniforme. Hicks da a conocer también la configuración de la clavija de forma que está aplanada en los dos lados paralelos al eje geométrico radial del engranaje solar y perpendicular a la dirección tangencial del movimiento de los planetarios. El objeto de este diseño es reducir el módulo en sección sobre el eje geométrico para permitir mayores deflexiones en esa dirección que permitan un mejor compartimiento de la carga, y que también permita una mejor prevención de la deflexión en la dirección radial debido a las fuerzas centrípetas. Así mismo, diferentes formas de realización de mecanismos de engranaje se describen por Looman J: "Apartado 3.7: Belastungsausgleich in Planetengetrieben", Zahnradgetriebe. Grundlagen, Konstruktionen, Anwendungen in Fahrzeugen, Springer Verlag, Berlín, DE, vol. 26 (3a Ed), 1 de enero de 1996 (1-1-1996), páginas 118 -125. Como
documento de la técnica anterior presuntamente más próximo, muestra diversas soluciones para engranajes solares o internos sin soporte así como engranajes planetarios soportados de manera flexible, engranajes solares o internos flexibles y engranajes planetarios radialmente flexibles.
Las siguientes características de la reivindicación 1 se divulgan en este documento:
Un ensamblaje de engranajes comprende una pluralidad de conjuntos de engranajes planetarios fijada a un soporte tipo horquilla, en el que cada uno de dichos conjuntos de engranajes planetarios comprende un engranaje planetario soportado por un eje de engranaje, presentando el eje de engranaje unos primero y segundo extremos opuestos, siendo cada extremo soportado por un primero y un segundo cojinete esférico montado dentro del soporte, siendo capaz el eje de engranaje de flectarse a lo largo de al menos parte de la longitud del eje de engranaje cuando se aplican cargas torsionales y rotacionales sobre el ensamblaje de engranajes.
Aunque los sistemas de la Patente estadounidense No. 3,33,713 así como todas las formas de realización ofrecidas por Looman pueden funcionar satisfactoriamente en determinados entornos, existe la necesidad de un ensamblaje de engranajes para su uso en entornos de grandes cargas, como por ejemplo los sistemas de piñón y cremallera de un gato de elevación.
Por tanto, constituye un objeto de la presente invención potenciar al máximo la deflexión de la carga de los engranajes planetarios para contribuir a la compartimiento de la carga entre engranajes planetarios.
Constituye otro objeto de la invención proporcionar un conjunto de engranajes planetarios que presente un eje planetario flexible que se flecte bajo las cargas torsionales y rotacionales aplicadas el ensamblaje de engranajes.
Estos y otros objetos de la invención se obtienen mediante la provisión de un ensamblaje de engranajes epicíclico que presenta una pluralidad de conjuntos de engranajes planetarios fijada en un soporte. Cada conjunto de engranajes planetarios presenta un engranaje planetario soportado por un eje planetario, presentando el eje planetario sus extremos opuestos soportados dentro del soporte, siendo capaz el eje planetario de flectarse a lo lago de al menos una parte de su longitud cuando el ensamblaje de los ejes sea sometido a cargas torsionales y rotacionales. Cada eje planetario presenta unos extremos opuestos soportados por un cojinete esférico [Rodamiento esférico o CARB (según fabricación por la corporación SKF de Suecia) o cojinetes lisos esféricos (como los que existen y son bien conocidos) se debe entender que quedan incluidos como posibles tipos de cojinetes esféricos utilizados en la presente invención en la que el término cojinete esférico se utiliza], con la parte media embutida en caliente sobre el engranaje planetario. El eje planetario presenta un doble... [Seguir leyendo]
Reivindicaciones:
I.- Un ensamblaje (1) de engranajes que comprende una pluralidad de conjuntos de engranajes planetarios fijados a un soporte (11) tipo en horquilla, en el que cada uno de dichos conjuntos de engranajes planetarios comprende un engranaje (12) planetario soportado por un eje (14) de engranaje, presentando el eje (14) de engranaje un primero (2) y un segundo (22) extremos opuestos, siendo cada extremo soportado por un primero y un segundo cojinetes (4, 42) esféricos montados dentro del soporte (11), siendo capaz el eje (14) de engranaje de flectarse a lo largo de al menos parte de la longitud del eje (14) de engranaje cuando son aplicadas cargas torsionales y rotacionales al ensamblaje (1) de engranajes,
en el que dicho eje (14) de engranaje comprende una parte (34) intermedia genéricamente cilindrica retenida en contacto con una superficie de contacto del engranaje (12) planetario, una primera porción (24) cónica que se extiende entre la parte (34) Intermedia y el primer extremo (2), y una segunda porción (28) cónica que se extiende entre la parte (34) intermedia y el segundo extremo (22), y
en el que una primera porción (3) cóncava está definida entre el primer extremo (2) y la primera porción (24) cónica.
2 - El aparato de la reivindicación 1, en el que la primera porción (3) cóncava está unitariamente conectada con la primera porción (24) cónica.
3 - El aparato de la reivindicación 1, en el que una segunda porción (32) cóncava está definida entre el segundo extremo (22) y la segunda porción (28) cónica.
4 - El aparato de la reivindicación 3, en el que la segunda porción (32) cóncava está unitariamente conectada a la segunda porción (28) cónica.
- El aparato de la reivindicación 1, en el que dicha primera porción (24) cónica y dicha segunda porción (32) cóncava están cada una conectadas de manera integral con la parte (34) intermedia en sus respectivos extremos de diámetro más ancho.
6.- El aparato de la reivindicación 1, presentando dicho primer extremo (2) y dicho segundo extremo (22) cada uno una superficie exterior genéricamente cilindrica capaz de ser encajada por los primero y segundo cojinetes (4, 42) esféricos.
7.- El aparato de la reivindicación 1, en el que el primer extremo (2) está adaptado para conectar con un lado de par elevado del soporte (11).
8 - El aparato de la reivindicación 1, en el que la primera porción (24) cónica presenta unas dimensiones longitudinales al menos ligeramente mayores que las dimensiones longitudinales de la segunda porción (28) cónica.
9 - El aparato de la reivindicación 1, en el que el eje (14) de engranaje está embutido en caliente sobre una superficie de contacto del engranaje (12) planetario.
1.- El aparato de la reivindicación 1, en el que el primer extremo (2) del eje (14) de engranaje y el segundo extremo (22) del eje (14) de engranaje están cada uno ajustado a presión sobre unos respectivos primero o segundo cojinetes (4, 42) esféricos.
II.- El aparato de la reivindicación 1, en el que el eje (14) de engranaje presenta un aspecto dedoble cono que se ahusa desde la parte (34) intermedia hacia los extremos (2, 22) opuestos.
Patentes similares o relacionadas:
Portasatélites, del 17 de Junio de 2020, de IMS Gear SE & Co. KGaA: Portasatélites para montar al menos una rueda satélite en un engranaje planetario para un dispositivo de regulación para regular dos componentes que pueden regularse […]
Engranaje planetario, del 10 de Junio de 2020, de Flender GmbH: Engranaje planetario , en particular, para una turbina eolica, con una carcasa de la transmision , una rueda solar central , que se mantiene […]
 Soporte para un engranaje planetario de un mecanismo de transmisión planetario, del 27 de Mayo de 2020, de Flender GmbH: Mecanismo de transmisión planetario , que comprende un soporte del planetario con una escotadura para el alojamiento de un eje del engranaje planetario […]
Soporte para un engranaje planetario de un mecanismo de transmisión planetario, del 27 de Mayo de 2020, de Flender GmbH: Mecanismo de transmisión planetario , que comprende un soporte del planetario con una escotadura para el alojamiento de un eje del engranaje planetario […]
Casquillo elástico para cojinetes planetarios, del 6 de Mayo de 2020, de FM Energie GmbH & Co. KG: Casquillo cilíndrico elástico pretensible que es capaz de absorber vibraciones en combinación con un árbol o eje de un cojinete de rueda o cojinete planetario […]
Soporte planetario, del 6 de Mayo de 2020, de Flender GmbH: Soporte planetario, mostrando un buje del lado de la transmisión , una cara externa del lado de la transmisión (2a), una cara del lado de la […]
Un conjunto de rueda planetaria para un engranaje planetario, del 1 de Abril de 2020, de Moventas Gears Oy: Un conjunto de rueda planetaria para un engranaje planetario, comprendiendo el conjunto de rueda planetaria : - un eje planetario , - una […]
Eje planetario, del 26 de Febrero de 2020, de Flender GmbH: Eje planetario para un engranaje planetario, caracterizado porque el eje planetario presenta una zona de brazo entre una zona de sujeción para la […]
 Engranaje planetario para un aerogenerador con ruedas planetarias apoyadas de manera deslizante, del 27 de Noviembre de 2019, de Miba Gleitlager Austria GmbH: Engranaje planetario para un aerogenerador, que comprende:
una rueda principal ;
una corona ;
un portasatélites […]
Engranaje planetario para un aerogenerador con ruedas planetarias apoyadas de manera deslizante, del 27 de Noviembre de 2019, de Miba Gleitlager Austria GmbH: Engranaje planetario para un aerogenerador, que comprende:
una rueda principal ;
una corona ;
un portasatélites […]