Energía undimotriz.
Un vehículo acuático propulsado por olas, que comprende:
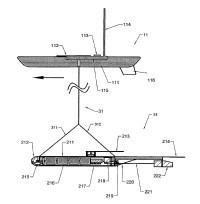
(1) un flotador (11) que comprende un sensor (113) de posición por satélite ,
(2) un nadador (21) que comprende (a) un sensor horizontal que detecta la dirección en un plano horizontal, y (b) un actuador de guiado (222),
(3) un amarre (31) que conecta el flotador (11) y el nadador (21), y
(4) un sistema de ordenador (115, 217) que (a) está vinculado al sensor de posición, al sensor horizontal y al actuador de guiado (116, 222), y (b) contiene, o se puede programar para contener, instrucciones para controlar el actuador de guiado como respuesta a señales recibidas desde el sensor de posición y desde el sensor horizontal, o en respuesta a señales recibidas desde un sensor en el vehículo;
siendo el flotador, nadador y amarre tales que, cuando el vehículo se encuentra en agua en calma, (i) el flotador (11) está sobre o cerca de la superficie del agua,
(ii) el nadador (21) está sumergida por debajo de flotador (11), y
(iii) el amarre (31) está bajo tensión;
comprendiendo el nadador (21)
(2a) un cuerpo (211) del nadador que tiene un eje longitudinal y
(2b) un sistema de aletas (213, 214) que
(a) está fijado al cuerpo (211) del nadador ,
(b) comprende una aleta, y
(c) cuando el vehículo está en agua con olas,
(i) tiene una configuración que cambia como resultado del movimiento de las olas, e
(ii) interacciona con el agua para generar fuerzas que tienden a mover al nadador en una dirección horizontal.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/001139.
Solicitante: Liquid Robotics, Inc.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 1329 Moffett Park Drive Sunnyvale, CA 94089-1134 ESTADOS UNIDOS DE AMERICA.
Inventor/es: HINE,ROGER G, HINE,DEREK L, RIZZI,JOSEPH D, KIESOW,KURT A. F, BURCHAM,ROBERT, STUTZ,WILLIAM A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63H1/30 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 1/00 Elementos de propulsión que actúan directamente sobre el agua (propulsión por reacción B63H 11/00). › de tipo no rotativo.
PDF original: ES-2488915_T3.pdf
Fragmento de la descripción:
Energía undimotriz
Referencia a solicitudes relacionadas
Esta solicitud reivindica prioridad de la solicitud provisional de patente estadounidense n2 6/76,893, depositada el 2 de enero de 26 (Docket JUP 1), la solicitud de patente estadounidense n2 11/43 6447, depositada el 18 de mayo de 26 (Docket JUP 1 -1), y la solicitud provisional de patente estadounidense n2 6/841,834, depositada el 1 de septiembre de 26 (Docket JUP 1-2).
Antecedentes de la invención
Esta invención se refiere a dispositivos y métodos que utilizan la energía de las olas en el agua (en lo que sigue denominada como "energía undimotriz").
A medida que una ola se desplaza a lo largo de la superficie del agua, produce un movimiento vertical del agua, pero ningún movimiento neto horizontal. La amplitud del movimiento vertical disminuye logarítmicamente con la profundidad; a una profundidad de aproximadamente la mitad de la longitud de onda, hay poco movimiento vertical. La velocidad de las corrientes inducidas por el viento disminuye asimismo acusadamente con la profundidad. Se han realizado un número de propuestas para utilizar la energía undimotriz para realizar trabajo útil. Se puede hacer referencia, por ejemplo, a las patentes estadounidenses n2 986.627, 1.315.267, 3.312.186, 3.453.981, 3.58.516, 3.845.733, 3.872.819, 3.928.967, 4.332.571, 4.371.347, 4.389.843, 4.598.547, 4.684.35, 4.842.56, 4.968.273, 5.84.63 y 6.561.856. El documento US 3.872.819 se considera como el estado de la técnica más próximo y da a conocer un flotador, un nadador con aletas pivotantes y un actuador de guiado, y un amarre que conecta el flotador y el nadador.
Sumario de la invención
De acuerdo con la presente invención, hemos descubierto dispositivos novedosos propulsados por olas, y métodos novedosos de utilizar dispositivos propulsados por olas. La invención se describirá principalmente con referencia a vehículos acuáticos que se desplazan sobre la superficie del agua cuando se sitúan en agua con olas que se mueven a lo largo de de la superficie del agua (en lo que sigue denominada como "agua con olas"). En tales vehículos, al menos parte de la energía undimotriz mueve el flotador sobre la superficie del agua (siendo convertida el resto de la energía undimotriz, si queda alguna, en otras formas útiles, o desechada). Sin embargo, la invención es útil igualmente cuando el flotador se mantiene en una posición fija, por ejemplo mediante un ancla u otro accesorio. En modos de realización preferidos, la invención hace posible que vehículos acuáticos sin conductor lleven a cabo tareas que serían tediosas, costosas o peligrosas de llevar a cabo utilizando vehículos operados por seres humanos.
En un primer aspecto preferido, esta invención proporciona un vehículo acuático propulsado por olas que comprende
(1) un flotador que comprende un sensor de posición por satélite,
(2) un nadador que comprende (a) un sensor horizontal que detecta una dirección en un plano horizontal, y (b) un actuador de guiado,
(3) un amarre que conecta el flotador y el nadador, y
(4) un sistema de ordenador que (a) está vinculado al sensor de posición, al sensor horizontal y al actuador de guiado, y (b) contiene, o se puede programar para contener, instrucciones para controlar el actuador de guiado como respuesta a señales recibidas desde el sensor de posición y el sensor horizontal, o en respuesta a señales recibidas desde un sensor en el vehículo;
siendo el flotador, nadador y amarre tales que, cuando el vehículo todavía se encuentra en agua en calma,
(i) el flotador está sobre o cerca de la superficie del agua,
(ii) el nadador está sumergida por debajo de flotador, y
(iii) el amarre está bajo tensión; y comprendiendo el nadador
(2a) un cuerpo del nadador que tiene un eje longitudinal y
(2b) un sistema de aletas que
(a) está fijado al cuerpo del nadador,
(b) comprende una aleta, y
(c) cuando el dispositivo está en agua con olas,
(i) tiene una configuración que cambia como resultado del movimiento de las olas, e
(¡i) interacciona con el agua para generar fuerzas que tienden a mover el nadador en una dirección que tiene una componente horizontal (en lo que sigue denominada simplemente como "en dirección horizontal").
El término "aleta" se utiliza aquí para denotar un componente que comprende una superficie generalmente laminar contra la cual, cuando el dispositivo propulsado por olas está en agua con olas, el agua ejerce una presión suficiente para influir sustancialmente en el movimiento del nadador. En muchos casos, el vehículo acuático incluye dos o más aletas, que pueden ser la misma o distintas, fijadas a distintos puntos en el cuerpo del nadador. El "eje longitudinal" del cuerpo del nadador se encuentra en el plano generalmente vertical a lo largo del cual se mueve el nadador cuando el dispositivo está en agua con olas.
El sistema de aletas tiene preferiblemente al menos una (es decir una o más) de las siguientes características:
(A) Comprende una aleta, por ejemplo una aleta generalmente laminar, que gira alrededor de un eje de giro (por ejemplo, un eje de giro generalmente transversal al eje longitudinal del cuerpo del nadador), eje de giro que tiene una relación espacial con el cuerpo del nadador que cambia cuando el dispositivo está en agua con olas.
(B) Comprende (i) una aleta, por ejemplo una aleta generalmente laminar, que gira alrededor de un eje de giro (por ejemplo, un eje de giro generalmente transversal al eje longitudinal del cuerpo del nadador), y (ii) un componente elástico (por ejemplo, un muelle helicoidal metálico, un muelle de láminas metálico, una barra metálica de torsión, o un componente de elastómero tal como una banda de goma natural o artificial) que no es parte de la aleta, y que se deforma elásticamente, y por tanto influye en los cambios en la configuración del sistema de aletas cuando el dispositivo está en agua con olas.
(C) Comprende una aleta, por ejemplo una aleta generalmente laminar y elásticamente deformable, que tiene un borde de ataque que comprende (i) una sección central relativamente rígida que tiene una relación espacial fija con el cuerpo del nadador (incluyendo la posibilidad de que la sección central gire alrededor de un eje de giro que tiene una relación espacial fija con el cuerpo del nadador), y (ii) secciones de fuera de borda relativamente deformables.
(D) Comprende dos aletas generalmente laminares, por ejemplo dos aletas generalmente laminares y deformables elásticamente que son imágenes especulares una de otra, y cada una de las cuales gira alrededor de un eje de giro alineado generalmente con el eje longitudinal del cuerpo del nadador (tales aletas funcionan de un modo similar a las aletas pectorales de un pez o las alas de un pájaro, y se denominan en lo que sigue como aletas "pectorales").
El amarre comprende preferiblemente una o ambas de las siguientes características:
(E) Comprende un elemento deformable elásticamente.
(F) Comprende un componente que transmite datos y/o potencia eléctrica.
El cuerpo del nadador comprende preferiblemente una o más de las siguientes características:
(G) Comprende una sección anterior sustancialmente rígida, una sección intermedia que es relativamente flexible en el plano vertical, y una sección posterior sustancialmente rígida, estando unido el amarre, por ejemplo, a la sección anterior, y estando unido el sistema de aletas, por ejemplo, a la sección anterior.
(H) Comprende uno o más componentes seleccionados entre equipo eléctrico, equipo de comunicaciones, equipo de grabación, electrónica de control, equipo de guiado, y sensores.
(I) Comprende una o más aletas sustancialmente verticales que influyen en la orientación del cuerpo del nadador en el plano horizontal. Tales aletas pueden ayudar a equilibrar las fuerzas de resistencia y a limitar el giro del nadador cuando el amarre tira lateralmente del mismo. En un modo de realización, el cuerpo del nadador comprende una aleta delantera fija y una aleta trasera que pueden ser accionadas para dirigir al nadador. En un modo de realización similar, una parte del cuerpo del nadador tiene una dimensión horizontal relativamente pequeña y una dimensión vertical relativamente grande; por ejemplo, tal parte, si es el extremo trasero del cuerpo del nadador, podría ser accionada para dirigir al nadador.
(J) Comprende un alojamiento generalmente tubular, con aletas pectorales que se extienden a ambos lados del cuerpo.
Cuando se hace referencia en lo que sigue a una aleta u otro componente que gira alrededor de un eje de giro, o a un componente que está montado de modo... [Seguir leyendo]
Reivindicaciones:
1. Un vehículo acuático propulsado por olas, que comprende:
(1) un flotador (11) que comprende un sensor (113) de posición por satélite ,
(2) un nadador (21) que comprende (a) un sensor horizontal que detecta la dirección en un plano horizontal, y (b) un actuadorde guiado (222),
(3) un amarre (31) que conecta el flotador (11) y el nadador (21), y
(4) un sistema de ordenador (115, 217) que (a) está vinculado al sensor de posición, al sensor horizontal y al actuador de guiado (116, 222), y (b) contiene, o se puede programar para contener, instrucciones para controlar el actuador de guiado como respuesta a señales recibidas desde el sensor de posición y desde el sensor horizontal, o en respuesta a señales recibidas desde un sensor en el vehículo;
siendo el flotador, nadador y amarre tales que, cuando el vehículo se encuentra en agua en calma,
(i) el flotador (11) está sobre o cerca de la superficie del agua,
(ii) el nadador (21) está sumergida por debajo de flotador (11), y
(iii) el amarre (31) está bajo tensión; comprendiendo el nadador (21)
(2a) un cuerpo (211) del nadador que tiene un eje longitudinal y (2b) un sistema de aletas (213, 214) que
(a) está fijado al cuerpo (211) del nadador,
(b) comprende una aleta, y
(c) cuando el vehículo está en agua con olas,
(i) tiene una configuración que cambia como resultado del movimiento de las olas, e
(ii) interacciona con el agua para generar fuerzas que tienden a mover al nadador en una dirección horizontal.
2. Un vehículo acuático de acuerdo con la reivindicación 1, que comprende (1) paneles solares o células solares (112) montados en el flotador, (2) baterías o células de combustible (216) que pueden ser recargadas mediante la salida de los paneles solares o células solares, y (3) equipo de comunicaciones (114) para enviar y recibir datos.
3. Un vehículo acuático de acuerdo con la reivindicación 1 o 2, que incluye un sensor que es una brújula, un giróscopo, un sensor de temperatura, un sensor de presión, un sensor de radiación electromagnética, un sensor químico, un magnetómetro, un sensor biológico, un sensor geológico, un sensor de corrientes acuáticas, un sensor de profundidad, un velocímetro, equipo para imágenes del lecho marino o un sensor de cambios climáticos.
4. Un vehículo acuático de acuerdo con cualquiera de las reivindicaciones anteriores, que incluye un hidrófono.
5. Un vehículo acuático de acuerdo con cualquiera de las reivindicaciones anteriores, en el cual el sistema de aletas tiene una o ambas de las siguientes características:
(A) la aleta comprendida en el sistema de aletas gira alrededor de un eje de giro, y el sistema de aletas comprende un componente elástico (2267) que (i) no es parte de la aleta comprendida en el sistema de aletas, y (ii) se deforma elásticamente e influye así en cambios en la configuración del sistema de aletas cuando el vehículo está en agua con olas; y
(B) la aleta comprendida en el sistema de aletas comprende una aleta que tiene un borde de ataque (2131) que comprende (i) una sección central relativamente rígida que tiene una relación espacial fija con el cuerpo del nadador, y (ii) secciones de fuera de borda (2135) relativamente deformables.
6. Un vehículo acuático de acuerdo con cualquiera de las reivindicaciones anteriores, en el que (1) la aleta comprendida en el sistema de aletas comprende una pluralidad de aletas (2131), (2) el sistema de aletas comprende una barra rígida (2265) que se monta en el cuerpo del nadador, (3) cada una de la pluralidad de aletas se monta de
modo giratorio en la barra rígida (2265), y (4) el sistema de aletas comprende un componente elástico (2267) que (i) no es parte de la pluralidad de aletas y (¡i) se deforma elásticamente e influye así en cambios en la configuración del sistema cuando el vehículo está en agua con olas.
7. Un vehículo acuático de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el amarre comprende un elemento elásticamente deformable.
8. Un vehículo acuático de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el amarre comprende un elemento tensor (313) y uno o más elementos (314) que no transportan ninguna carga y que transmiten energía eléctrica y/o datos.
9. Un vehículo acuático de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el amarre comprende primeros y segundos amarres unidos respectivamente a posiciones anterior y posterior del flotador y el nadador.
1. Un vehículo acuático de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el cuerpo del nadador tiene una o ambas de las siguientes características
(1) comprende una segunda aleta (212) que (i) no está comprendida en el sistema de aletas, e (ii) influye en la orientación del cuerpo del nadador en el plano horizontal cuando el vehículo está en agua con olas; y
(2) comprende un alojamiento generalmente tubular y terceras aletas (222, 223) que (i) no están comprendidas en el sistema de aletas y (ii) proporcionan superficies de aleta verticales contiguas respectivamente al extremo delantero y al extremo trasero del cuerpo del nadador.
11. Un vehículo acuático de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el nadador tiene un centro de gravedad, y el amarre está unido al nadador de modo sustancialmente vertical por encima del centro de gravedad; el flotador tiene un centro de flotación, y el amarre está unido al flotador sustancialmente en vertical por encima del centro de flotación; y el flotador tiene un centro de resistencia, y el amarre está unido al flotador delante del centro de la resistencia.
12. Un vehículo acuático de acuerdo con cualquiera de las reivindicaciones anteriores, que comprende un propulsor motorizado.
13. Un vehículo acuático de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el flotador comprende cámaras que puedan ser infladas con aire para aumentar la flotabilidad y desinfladas para reducir la flotabilidad, y/o cámaras que pueden ser rellenadas con agua para disminuir la flotabilidad y vaciadas para aumentar la flotabilidad.
14. Un método para utilizar energía undimotriz que comprende situar un vehículo acuático como el definido en cualquiera de las reivindicaciones 1 a 14 en un cuerpo de agua que tiene o que se espera que tenga olas de agua que se desplazan a través de su superficie.
15. Un método para utilizar energía undimotriz de acuerdo con la reivindicación 14, en el que el vehículo acuático comprende equipo de comunicaciones para enviar y recibir datos, y el método comprende enviar señales al equipo de comunicaciones desde una estación de control a distancia.
Patentes similares o relacionadas:
BICICLETA ACUÁTICA BIÓNICA, del 5 de Diciembre de 2019, de JIANG,JIAYI: Bicicleta acuática biónica constituida por un chasis con un manillar y en su parte inferior cuenta con unas barras , bien horizontales y unidas a […]
Tren de balanza de empuje para barco, avión y otras máquinas, del 12 de Marzo de 2018, de PORRAS VILA,F. JAVIER: El tren de balanza de empuje para barco, avión y otras máquinas, es un sistema formado por un cilindro cónico enfrentado a un plato que […]
PERFECCIONAMIENTOS EN SISTEMAS MARINOS DE PROPULSION., del 1 de Marzo de 1984, de GOULD INC.: SISTEMAS MARINOS DE PROPULSION, DEL TIPO QUE TIENEN UNA HELICE DE PROPULSION Y UNA FUENTE DE ALIMENTACION POR BATERIA.CONSTA DE UN MOTOR PROPULSOR DE CORRIENTE ALTERNA […]