Dispositivo electrónico y procedimiento de protección frente a vuelco para vehículos agrarios, forestales y de obras públicas.
Dispositivo electrónico de protección frente a vuelco para vehículos agrarios,
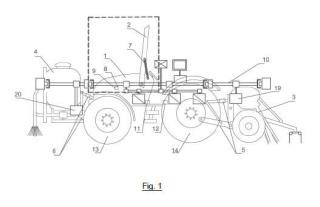
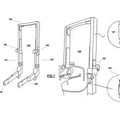
forestales y de obras públicas compuesto por una estructura de protección (2), en forma de U invertida o T, que realiza un movimiento circular desde la posición de abatimiento (29) hasta la posición de trabajo. El movimiento se produce cuando la unidad de control electrónico del sistema antivuelco (26) detecta peligro de accidente basándose en los datos suministrados por un conjunto de sensores, entre ellos dos o más acelerómetros (11) y un inclinómetro triaxial (12), en combinación con los datos proporcionados por el sistema de comunicaciones del vehículo (1) y de los aperos trasero y delantero (3) y (4). Cuando la unidad de control electrónico del sistema antivuelco (26) detecta el riesgo de accidente se activa de forma automática el electroimán (8) que permite la acción del resorte de activación (7) de la estructura de seguridad.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430043.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: RUIZ GARCÍA,Luis, TORRE SÁNCHEZ,Alejandro.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R21/13 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 21/00 Disposiciones o equipamientos sobre los vehículos para proteger a los ocupantes o a los peatones o para evitar ser dañados en caso de accidente o de otros riesgos de la circulación (cinturones o arneses de seguridad en los vehículos B60R 22/00; asientos construidos para proteger al ocupante de los efectos de las fuerzas de aceleración anormales, p. ej. asientos anticolisión o asientos de seguridad, B60N 2/42; disposiciones para absorber la energía en los volantes de dirección de vehículos B62D 1/11; disposiciones para absorber la energía en las columnas de dirección de vehículos B62D 1/19). › Protección antivuelco.
Fragmento de la descripción:
DISPOSITIVO ELECTRÓNICO Y PROCEDIMIENTO DE PROTECCIÓN FRENTE A VUELCO PARA VEHÍCULOS AGRARIOS, FORESTALES Y DE OBRAS PÚBLICAS
Sector técnico La presente invención se engloba dentro de los dispositivos encaminados a la protección de 5 los ocupantes de un vehículo agrario, forestal o de obras públicas en situaciones de vuelco del mismo y más concretamente dentro de los dispositivos de accionamiento electrónico de protección frente a vuelco.
Estado de la técnica
El sector agrario es, junto con el de la construcción, uno de los sectores que anualmente 10 registran más accidentes de trabajo graves o mortales, tanto en España como a nivel mundial. Las principales causas de los accidentes laborales son la falta de formación del personal y la dificultad física del medio en el que se realiza el trabajo.
Hay numerosas referencias de dispositivos de seguridad encaminados a la reducción de la siniestralidad, la mayoría de los cuales tienen por objeto la limitación del ángulo de rotación 15 del vehículo en caso de vuelco. Estos sistemas consisten en una estructura, la mayoría en forma de U invertida o T, ancladas al chasis del vehículo. Estas estructuras se disponen en su mayoría retrasadas respecto del puesto de conducción, patente US5529342. Las estructuras rígidas tienen los inconvenientes de que pueden dificultar la visión del conductor durante el trabajo y pueden impedir el acceso del vehículo a zonas de altura reducida como 20 por ejemplo zonas de emparrado o invernaderos.
Para solucionar el problema anterior, se han desarrollado numerosas estructuras, también en forma de U invertida, que pueden adoptar diferentes configuraciones entre una posición de trabajo, posición extendida, y una posición replegada mediante un movimiento angular, como por ejemplo la patente EP0458761, o mediante una combinación de movimientos 25 lineal y angular, patente US5839758.
Otra solución a la limitación de acceso de los vehículos con estructura de protección a zonas de escasa altura, es el equipamiento de barras de protección en forma de U invertida en la que los elementos verticales de la misma están compuestos por dos o más elementos concéntricos que pueden desplazarse longitudinalmente unos respecto de los otros, para 30 pasar de la posición de repliegue a la de trabajo, como muestran las patentes US5129676 y US5626361. Estos dispositivos además incluyen un muelle interior que en el momento de pasar de la posición de repliegue a la de trabajo contribuye al desplazamiento de la misma reduciendo el esfuerzo necesario por parte del operario.
Las barras plegables antivuelco, abatibles o extensibles, resuelven el problema de la 5 accesibilidad pero presentan el inconveniente de que una vez la estructura ha sido replegada independientemente de la causa, el conductor se siente reacio a colocarla de nuevo en la posición de trabajo. Esto hace que en caso de accidente, se produzca el aplastamiento del conductor, por la disfuncionalidad de la estructura.
Actualmente existen algunas propuestas encaminadas a solventar la circunstancia anterior 10 mediante estructuras de protección de tipo U invertida plegable de accionamiento automático. La estructura pasa de la posición de repliegue a la de trabajo de forma automática cuando el vehículo supera un determinado ángulo de inclinación con respecto a la verticalidad. El sistema se compone de un inclinómetro, que una vez superado el ángulo de inclinación prefijado, en primer lugar activa un sistema de avisos luminosos y en segundo 15 lugar libera un gatillo conectado a un sistema electromagnético que, mediante la acción de un resorte, coloca la barra antivuelco en posición de trabajo, como recoge la patente ES1076520U.
Las barras antivuelco plegables o abatibles que se activan automáticamente en base al ángulo de inclinación del vehículo, no consideran la circunstancia de que un mismo vehículo, 20 puede sufrir un accidente de vuelco o no para un mismo ángulo de inclinación dependiendo de las condiciones cinemáticas del mismo y de las condiciones del entorno que rodea al vehículo, tales como la pedregosidad del suelo o la presencia de irregularidades en la superficie del mismo.
El sistema presentado en la patente ES2378636 avisa al conductor, mediante señales opto-25 acústicas de diferentes intensidades en función de la peligrosidad de la situación. Este dispositivo calcula la peligrosidad de las distintas situaciones, basándose en sensores que miden la inclinación y aceleración del vehículo y en los datos de pesos y medidas del vehículo y de los aperos que lleva acoplados.
Este sistema, pese a que avisa al conductor de situaciones de riesgo, requiere la 30 intervención del conductor debido a que debe ser él, quien modifique alguno de los parámetros que pueden causar el accidente, pero en hay determinadas condiciones en las que esto no es posible, como por ejemplo cuando se produce el vuelco por una salida de vía. En estas situaciones el sistema no resulta eficaz ya que el conductor no puede hacer nada para evitar el accidente.
En los vehículos con cabina el problema no radica en la inexistencia de estructuras de protección sino en la circunstancia de que cuando el conductor presiente que va a sufrir un 5 accidente con resultado de vuelco, intenta salir de la cabina de forma instintiva para intentar escapar de la situación de peligro, con el consiguiente riesgo de aplastamiento. Esta conducta, pese a que contraviene las recomendaciones de los fabricantes, es la responsable de gran número de fallecimientos.
Los problemas presentados anteriormente se solucionan con la invención tal y como está 10 definida en la reivindicación 1. En las reivindicaciones dependientes se definen realizaciones preferidas de la invención.
Descripción de la invención La presente invención hace referencia a un dispositivo y procedimiento electrónico de protección frente al vuelco de vehículos agrarios, forestales y de obras públicas el cual se 15 basa en la monitorización de los parámetros físicos que afectan a la estabilidad de dichos vehículos. La monitorización se lleva a cabo mediante el empleo de diferentes sensores instalados en el vehículo, que transmiten la información mediante el sistema de comunicaciones electrónico propio del vehículo, como puede ser el estándar de comunicaciones ISO11783, conocido como ISOBUS, a un software de cálculo que realiza 20 comprobaciones periódicas de las condiciones de estabilidad y en caso de riesgo de vuelco longitudinal o transversal emite una señal luminosa en el terminal virtual del sistema de gestión electrónico de vehículo y aperos y una señal acústica audible por el conductor. La intensidad de estas señales crece a medida que aumenta el riesgo de vuelco.
El sistema determina el tipo de acoplamiento y la posición de los aperos gracias a los 25 sensores propios de los sistemas elevadores, tanto delantero como trasero.
El nivel de llenado de los aperos se determina a partir de sensores de peso integrados en el vehículo, que miden el peso del tractor y de los aperos. Para una mayor fiabilidad, el nivel de llenado también se calcula por diferencia entre el nivel de llenado inicial y el producto dosificado, considerando la superficie trabajada y la dosis aplicada por unidad de superficie. 30 Si la diferencia entre ambos valores no difiere significativamente el dato final del nivel de llenado se obtiene con la media aritmética de ambos valores. En caso de que ambos valores difieran significativamente el sistema avisara al conductor de que el sistema no funciona correctamente.
Los datos de dimensiones tanto del vehículo, como de los diferentes aperos con los que esté trabajando en cada momento pueden ser importados en el software de cálculo de la 5 unidad electrónica del vehículo o del implemento (apero) , mediante un sistema de comunicaciones electrónico, a partir de los datos proporcionados por las unidades de control electrónico de los aperos (19) y (20) , o bien pueden ser introducidos manualmente por el propio operario a través del terminal virtual.
También se registran la aceleración, la velocidad, el patinamiento, el deslizamiento y el peso 10 en cada una de las ruedas del vehículo y se comparan con la aceleración, la velocidad, el patinamiento, el deslizamiento y el peso del conjunto vehículo-aperos.
Se determinan la velocidad y la aceleración, mediante acelerómetros, de cada una de las ruedas delanteras y traseras del vehículo y del peso que gravita sobre cada una de ellas y se realiza un comparación con la velocidad, la aceleración y el peso del conjunto del 15 vehículo-apero, con el fin de determinar si hay diferencias significativas que produzcan tal inestabilidad que puedan desembocar...
Reivindicaciones:
1. Dispositivo electrónico de protección frente al vuelco de vehículos agrarios, forestales o de obras públicas caracterizado porque comprende:
- una estructura de protección (2) de las del tipo en forma de U invertida o de T 5
- un sensor inclinómetro triaxial (11) para la detección del ángulo de inclinación en la dirección transversal y longitudinal del vehículo
- dos o más sensores acelerómetros (12)
- altavoces (37)
- dos o más sensores para la medición del peso del vehículo y de los aperos 10 delanteros (4) y traseros (3) y, en base a sus dimensiones, para el cálculo del centro de gravedad del conjunto vehículo-aperos
- dos o más sensores para la medición del deslizamiento y patinamiento de los neumáticos delanteros (13) y traseros (14)
- una unidad central de control electrónico del vehículo (15) compatible con el 15 sistema de gestión electrónica del vehículo, con medios para recibir y enviar los datos suministrados por los sensores (38) del vehículo y por las unidades de control electrónico secundarias del vehículo (16) y de los aperos traseros (19) y delanteros (20) , con capacidad de calcular el centro de gravedad del vehículo y estimar el riesgo de vuelco en función de los parámetros cinemáticos del 20 movimiento de vehículo
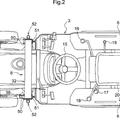
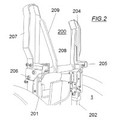
- una unidad de control electrónico del sistema antivuelco (26) con medios para la recepción y procesamiento de los datos suministrados por la unidad central de control electrónico del vehículo (15) , para la determinación del nivel de estabilidad, y para la activación de señales luminosas y acústicas y para la 25 activación de un mecanismo de despliegue de la estructura de protección antivuelco (2) compuesto a su vez por uno o más electroimanes (8) , al menos un soporte de reposo (9) , al menos un resorte de sujeción (36) , y uno o varios resortes (7) de activación de la estructura de protección antivuelco (2)
- un terminal virtual (25) que se comunica con la unidad central de control 30 electrónico del vehículo (15) y con la unidad de control electrónico antivuelco (26)
2. Dispositivo electrónico de protección frente al vuelco según la reivindicación 1 caracterizado porque, para vehículos con cabina, la unidad de control electrónico del sistema antivuelco (26) dispone de medios para el bloqueo momentáneo de las puertas del vehículo durante la situación de riesgo de vuelco.
3. Procedimiento para calcular la situación de peligro de vuelco mediante el dispositivo según reivindicaciones 1 y 2 caracterizado por que comprende las siguientes etapas o fases que se realizan de manera iterativa durante el funcionamiento del vehículo:
- Determinación del tipo de acoplamiento y de la posición de los aperos (3) y (4) , por los sensores de los sistemas elevadores 10
- Determinación del nivel de llenado de los aperos a partir de los datos proporcionados por los sensores que miden el peso del vehículo y de los aperos delanteros (4) y traseros (3) y comparación del nivel de llenado determinado anteriormente, con el obtenido al calcular la diferencia entre el nivel de llenado inicial y el producto dosificado, considerando la superficie trabajada y la dosis 15 empleada por unidad de superficie utilizando el dato obtenido mediante la media aritmética, en caso de que no difieran significativamente y avisando al conductor de que el sistema no funciona correctamente en caso contrario
- Obtención de las dimensiones del vehículo (1) y de los aperos delanteros (3) y traseros (4) , a partir de los datos proporcionados por las unidades de control 20 electrónico de los aperos (19) y (20) o en su defecto introducidos manualmente a través del terminal virtual (25)
- Determinación de la velocidad, el patinamiento, el deslizamiento la aceleración, mediante los acelerómetros (12) , de cada una de las ruedas delanteras (13) y traseras (14) del vehículo (1) y del peso que gravita sobre cada una de ellas y 25 comparación con la velocidad, el patinamiento, el deslizamiento, la aceleración y el peso del conjunto del vehículo-aperos
- Transmisión de las medidas determinadas en las etapas anteriores a las unidades de control electrónico trasera (19) , delantera (20) , secundarias del vehículo (16) y de los aperos y (19) y (20) de allí, a través del bus vehículo-30 aperos (21) y del bus interno del vehículo (17) , hasta la unidad central de control electrónico del vehículo (15) y de allí a la unidad de control electrónico del sistema antivuelco (26)
- Determinación en la unidad de control electrónico del sistema antivuelco (26) del centro de gravedad del conjunto vehículo-aperos y del nivel de estabilidad 35 mediante el procesamiento de los datos transmitidos en la etapa anterior y los procedentes del inclinómetro (11) , para la determinación del grado de peligro de vuelco del vehículo
- En caso de peligro de vuelco del vehículo, activación de señales luminosas (42) mostradas en terminal virtual (25) y acústicas (41) , a través de los altavoces (37) 5 con una intensidad creciente y proporcional al nivel de peligro, y superado un determinado umbral, activación de los resortes (7) para la elevación de la estructura de protección (2) en vehículos sin cabina o de bloqueo de puertas momentáneo en el caso de vehículos con cabina.
Patentes similares o relacionadas:
 Vehículo de trabajo, del 27 de Noviembre de 2019, de KUBOTA CORPORATION: Un vehículo de trabajo que comprende:
un bastidor protector que incluye un bastidor inferior fijado a un bastidor de la carrocería del vehículo […]
Vehículo de trabajo, del 27 de Noviembre de 2019, de KUBOTA CORPORATION: Un vehículo de trabajo que comprende:
un bastidor protector que incluye un bastidor inferior fijado a un bastidor de la carrocería del vehículo […]
Cubierta para un elemento antivuelco, del 24 de Junio de 2019, de K.L. KASCHIER- UND LAMINIER GMBH: Cubierta de un elemento antivuelco de un elemento antivuelco elevable de un vehículo a motor , donde en la cubierta , por encima del elemento antivuelco […]
JAULA DE SEGURIDAD PARA VEHÍCULOS, del 14 de Febrero de 2018, de ESCUDERO VICENTE, Javier: 1. Jaula de seguridad para vehículos, caracterizada porque está constituida a partir de un arco delantero y un arco posterior que se vinculan entre sí a través […]
AIRBAG ADAPTABLE AL CASCO, del 26 de Enero de 2017, de MEDINA BAS, Victor Alberto: Airbag adaptable al casco, integradoen una mochila , posicionada o fijada a la espalda del usuario, provista de unos medios de inflado rápido del […]
 SISTEMA DE SEGURIDAD PARA MAQUINARIA AGROINDUSTRIAL Y PROCEDIMIENTO DE OPERACIÓN DE DICHO SISTEMA, del 6 de Marzo de 2015, de MARIN PEÑA INDETEC S.L: Sistema de seguridad para maquinaria agroindustrial y procedimiento de operación de dicho sistema.
La invención se refiere a un sistema y a un procedimiento de seguridad […]
SISTEMA DE SEGURIDAD PARA MAQUINARIA AGROINDUSTRIAL Y PROCEDIMIENTO DE OPERACIÓN DE DICHO SISTEMA, del 6 de Marzo de 2015, de MARIN PEÑA INDETEC S.L: Sistema de seguridad para maquinaria agroindustrial y procedimiento de operación de dicho sistema.
La invención se refiere a un sistema y a un procedimiento de seguridad […]
 SISTEMA DE SEGURIDAD PARA MAQUINARIA AGROINDUSTRIAL Y PROCEDIMIENTO DE OPERACIÓN DE DICHO SISTEMA, del 20 de Noviembre de 2014, de MARIN PEÑA INDETEC S.L: La invención se refiere a un sistema y a un procedimiento de seguridad y protección para maquinaria agroindustrial que comprende, al menos, un arco de […]
SISTEMA DE SEGURIDAD PARA MAQUINARIA AGROINDUSTRIAL Y PROCEDIMIENTO DE OPERACIÓN DE DICHO SISTEMA, del 20 de Noviembre de 2014, de MARIN PEÑA INDETEC S.L: La invención se refiere a un sistema y a un procedimiento de seguridad y protección para maquinaria agroindustrial que comprende, al menos, un arco de […]
Dispositivos o modificaciones, en un autobus para proteger a los pasajeros en caso de vuelco, del 13 de Octubre de 2014, de PLAZA ALVAREZ, ALEJANDRO ANTONIO: 1. Dispositivo para proteger a los pasajeros en un autobús, en caso de vuelco. Caracterizado por tener una protección que consta de un sensor que detecte la […]
MECANISMO DE LIBERACIÓN ELECTROMAGNÉTICA, del 16 de Junio de 2011, de MULTIMATIC INC.: Un mecanismo que comprende un vástago accionado por resorte que tiene un rebaje (1a), un miembro de fijación susceptible de encajar en el rebaje para bloquear […]