Efector terminal giratorio, comprimible y expandible, para un robot industrial.
Un efector (10) terminal para un brazo (4) de un robot industrial que comprende:
(a) una pluralidad de tubos (62) de succión acoplados en comunicación fluida con un múltiple (26; 28) de vacío;
(b) medios (60) para variar el espaciamiento entre la pluralidad de tubos (62) de succión; caracterizado por que este comprende además
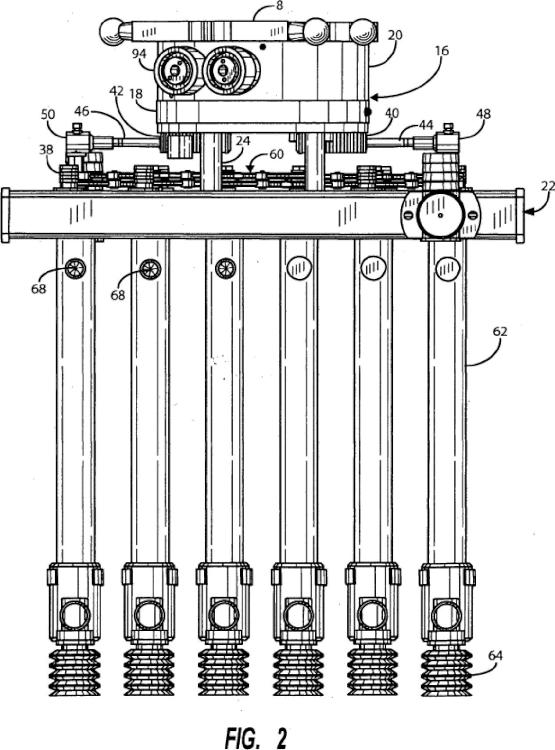
(c) medios (16) para rotar el múltiple (26; 28) de vacío y los medios (60) para variar el espaciamiento entre la pluralidad de tubos (62) de succión con relación al brazo (4) del robot industrial, los medios para rotar comprenden un accionador (16) rotatorio neumáticamente operado que tiene una plataforma (18) rotatoria unida a un miembro (20) de cuerpo, el múltiple (26; 28) de vacío está unida a una de dichas plataformas (18) rotatoria y dicho miembro (20) de cuerpo, los medios (16) para rotar el múltiple (26; 28) de vacío y los medios (60) para variar el espaciamiento son de tal forma que ellos pueden operar al mismo tiempo.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05012948.
Solicitante: DOBOY INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 869 SOUTH KNOWLES AVENUE NEW RICHMOND, WI 54017 ESTADOS UNIDOS DE AMERICA.
Inventor/es: OSTEN,GABRIEL F, PRICE,MARK A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
- B25J15/06 B25J […] › B25J 15/00 Cabezas de aprehensión. › con medios de retención magnéticos o que funcionan por succión.
PDF original: ES-2548486_T3.pdf
Fragmento de la descripción:
Efector terminal giratorio, comprimible y expandible, para un robot industrial Antecedentes de la invención I. Campo de la Invención: Esta invención se relaciona de manera general con robótica de recoger y colocar, y más particularmente con efectores terminales utilizados en tal equipo.
II. Discusión de la técnica anterior: En la industria de embalajes, muchas de las tareas que se han llevado a cabo manualmente ahora son efectuadas por robots industriales. Como un ejemplo, tales robots se han diseñado para recoger productos individuales provenientes de un primer transportador que sale de una máquina de embalaje a alta velocidad y transporta los productos embalados en una caja o caja de cartón que viaja a lo largo de un segundo transportador. Se presenta un problema, sin embargo, si el tamaño y/o la forma del producto son tal que ésta se pueda ajustar a la caja de cartón solo si se orienta de manera precisa de cierta forma. Entonces, también, si el robot recoge simultáneamente una pluralidad de productos de un transportador, en lugar de uno a la vez, y los productos están viajando hacia abajo en un transportador escalonado, éste presenta un problema de cómo depositar los productos como un grupo en una caja de cartón en una relación contigua.
Para propósito solo de ejemplo, se asume por el momento que los productos que dejan la máquina de embalaje son barras de dulce de una dimensión de longitud, ancho y grosor definido y que ellos están viajando entre orejetas o aletas de un transportador escalonado que mantiene un espacio predeterminado entre los productos. Asumiendo adicionalmente que se desea depositar una cantidad predeterminada de barras de dulce, es decir, una docena, en una caja de cartón rectangular con la parte superior abierta en la medida en que la caja de cartón se mueve hacia abajo a un segundo transportador que corre paralelo al primero. El robot empleado debe ser capaz de recoger simultáneamente varias barras del transportador escalonado, reunir las varias barras para eliminar el espaciamiento entre ellas y luego depositar las varias barras como un grupo en la caja de cartón y luego repetir el proceso hasta que la cantidad deseada se ha guardado en la caja. Dependiendo de las dimensiones de las barras de dulce y de la dimensión de la caja de cartón, puede también ser necesario rotar el grupo de barras mientras está en tránsito, por vía del robot, de tal manera que ellas se alinearán adecuadamente para el depósito en la caja.
Los documentos US 2003/0235491 A1 y JP 0626257 2A se relacionan con efectores terminales de robot que comprenden agarraderas que tienen un espaciamiento variable entre cada una de ellas.
Es el principal objeto de la presente invención suministrar un efector terminal mejorado para un robot industrial para uso en aplicaciones de recoger y colocar.
Otro objeto de la invención es suministrar un efector terminal capaz de comprimir y expandir el espaciamiento entre dispositivos de agarre de diversos productos que comprendan el efector terminal.
Aún otro objeto de la invención es suministrar un efector terminal para un robot que tenga una cabeza rotable capaz de rotar varios productos y expandir y contraer el espaciamiento entre los varios productos recogidos por el efector terminal en la medida en que los productos están siendo llevados por un robot.
Resumen de la invención Los anteriores objetivos se efectúan al suministrar un efector terminal para un brazo de un robot industrial que comprende una pluralidad de tubos de succión acoplados en comunicación fluida a un múltiple de vacío donde cada uno de los tubos de succión es capaz de agarrar un producto. El efector terminal también incluye unos medios para variar el espaciamiento entre la pluralidad de tubos de succión así como también unos medios para rotar el múltiple de vacío y los medios para variar el espaciamiento entre la pluralidad de tubos de succión con relación al brazo del robot industrial, Los medios para rotar comprenden un accionador rotatorio neumáticamente operado que tiene una plataforma rotatoria unida a un miembro de cuerpo, el múltiple de vacío está unido a una de dichas plataformas rotatorias y dicho miembro de cuerpo, los medios para rotar el múltiple de vacío y los medios para variar el espaciamiento son tales que ellos pueden operar al mismo tiempo.
Sin limitación, los medios para variar el espaciamiento entre la pluralidad de tubos de succión puede comprender un montaje con enlace "lazy tong" que está acoplado a un accionador lineal de tal manera que la extensión del accionador lineal da como resultado una expansión de la distancia entre los tubos de succión y la retracción del accionador lineal da como resultado una compresión de la pluralidad de los tubos de succión.
Descripción de los dibujos
Las características, objetos y ventajas anteriores de la invención serán evidentes para aquellos expertos en la técnica de la siguiente descripción detallada de una realización preferida, especialmente cuando se considera en conjunto con los dibujos que la acompañan en los cuales:
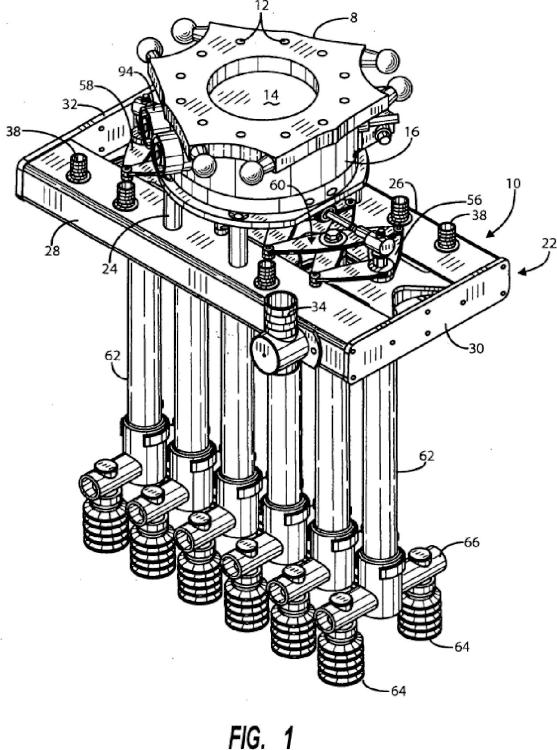
La Figura 1 es una vista en perspectiva de una realización preferida de un efector terminal construido de acuerdo con la presente invención;
La Figura 2 es una vista en elevación lateral de un efector terminal de la Figura 1;
La Figura 3 es una vista de extremo de una realización de la Figura 1; y La Figura 4 es una vista en explosión de un accionador rotatorio empleado en la realización de la Figura 1.
Descripción de la realización preferid.
Se utilizará cierta tecnología en la siguiente descripción por conveniencia como referencia solamente y no será limitante. Las palabras "hacia arriba", "hacia abajo", "hacia la derecha", y "hacia la izquierda" se referirán a las direcciones en los dibujos a los cuales se hace referencia. Las palabras "hacia adentro", y "hacia afuera" se referirá a las direcciones de acercamiento y alejamiento desde, respectivamente, el centro geométrico del dispositivo y las partes asociadas del mismo. Dicha terminología incluirá las palabras específicamente mencionadas anteriormente, los derivados de las mismas y palabras de similar importancia.
En referencia primero a la Figura 1, se indica de manera general mediante el numeral 10 un efector terminal para uso en un robot industrial tal como el Robot Delta del tipo descrito en la Patente de los Estados Unidos 4, 976, 582 de Raymond Clavel (la patente 482 de Clavel) . La patente describe un robot para manejar productos en un espacio tridimensional y aquellos expertos en la técnica pueden referirse a esa patente para una descripción de un robot con el cual se pueda utilizar la presente invención. Tal robot se diseña para aplicaciones de recogido y colocación a alta velocidad y de alta precisión, tal como se puede utilizar de manera efectiva en la industria de máquinas de embalaje, para recoger productos de una correa transportadora y colocarlos en cajas de cartón o para carga de una máquina embaladora de alta velocidad con una orientación predeterminada y un espaciamiento entre los productos.
En referencia a la Figura 2 de la patente 482 de Clavel el Robot Delta incluye una forma generalmente un fundido 1 principal de forma generalmente triangular que tiene tres ejes giratorios 2 unidos para rotación alrededor de ejes horizontales que se extienden generalmente en paralelo a los tres lados del fundido 1 triangular. Cada uno de los 3 ejes está dispuesto para ser impulsado por un servo motor 3 para rotar los brazos 4 en un plano vertical. Los codificadores 7 rotatorios sobre el servo motor 3 alimentan la información de posición a un módulo 12 controlador principal. En los extremos libres de los brazos 4 aparecen barras cruzadas de una dimensión de longitud predeterminada y que llevan un conector separable, tal como articulaciones 26 de rótula, en extremos opuestos de la misma. Las articulaciones 26 separables de rótula acoplan las barras cruzadas a un par de varillas que comprende un total de 6 antebrazos 5, todos de igual longitud.
Suspendidos de los extremos inferiores de los 6 antebrazos 5 se encuentra un miembro 8 de placa base de forma triangular. Más particularmente, las barras cruzadas se proyectan lateralmente desde la placa 8 base próxima a los 3 vértices del mismo y conectores separables, por ejemplo, articulaciones 27 de rótula, se utilizan para unir los extremos inferiores de los miembros 5 de antebrazo a las barras cruzadas. Soportados del lado inferior de la placa 8 base se encuentra un efector 9 terminal que puede comprender una copa vacía u otro tipo de miembro de agarre. Por cuanto los antebrazos 5 son de igual longitud, en la medida en que los servo motores respectivos le imparten rotación... [Seguir leyendo]
Reivindicaciones:
1. Un efector (10) terminal para un brazo (4) de un robot industrial que comprende:
(a) una pluralidad de tubos (62) de succión acoplados en comunicación fluida con un múltiple (26; 28) de vacío;
(b) medios (60) para variar el espaciamiento entre la pluralidad de tubos (62) de succión; caracterizado por que este comprende además
(c) medios (16) para rotar el múltiple (26; 28) de vacío y los medios (60) para variar el espaciamiento entre la pluralidad de tubos (62) de succión con relación al brazo (4) del robot industrial, los medios para rotar comprenden un accionador (16) rotatorio neumáticamente operado que tiene una plataforma (18) rotatoria unida a un miembro
(20) de cuerpo, el múltiple (26; 28) de vacío está unida a una de dichas plataformas (18) rotatoria y dicho miembro
(20) de cuerpo, los medios (16) para rotar el múltiple (26; 28) de vacío y los medios (60) para variar el espaciamiento son de tal forma que ellos pueden operar al mismo tiempo.
2. El efector (10) terminal de la reivindicación 1 donde el múltiple de vacío incluye un par de miembros (26; 28) de múltiple de vacío mantenidos en paralelo, en relación separada y cada uno teniendo un puerto (34; 36) de entrada adaptado para ser selectivamente acoplado a una fuente de vacío y a una pluralidad de puertos (38) de salida, los puertos (38) de salida de los miembros (26; 28) del múltiple están acoplados mediante tubería flexible a los puertos (34; 36) de entrada de vacío sobre la pluralidad de los tubos (62) de succión.
3. El efector (10) terminal como en la reivindicación 1 en donde los medios para variar el espaciamiento entre la pluralidad de tubos (62) de succión comprende un montaje (56; 58; 60) de enlace "lazy tong" desde el cual se suspende la pluralidad de tubos (62) de succión.
4. El efector (10) terminal como en la reivindicación 1 y que incluye además un accionador (40; 42) lineal acoplado de manera operativa entre el montaje (56; 58; 60) de enlace "lazy tong" y la una de dichas plataformas (18) rotatoria y el dicho miembro (20) de cuerpo al cual se unen el múltiple (26; 28) de vacío.
5. El efector (10) terminal como en la reivindicación 4 en donde el accionador (40; 42) lineal es neumáticamente operado.
6. El efector (10) terminal como en una cualquiera de las reivindicaciones 1-5 y que incluye además al menos una copa (64) elastomérica de succión acoplada a un extremo distante de cada una de la pluralidad de tubos (62) de succión.
7. El efector (10) terminal como en la reivindicación 3 y que comprende además: una pluralidad de tubos (62) rígidos fijos al mecanismo (56; 58; 60) de enlace "lazy tong", cada uno de dichos tubos (62) rígido soporta una copa (64) de succión próxima a un extremo distante del mismo y que tiene un puerto (34; 36) de entrada de vacío en comunicación fluida con uno de la pluralidad de puertos (38) de salida de vacío del miembro (26; 28) del múltiple; y un accionador (16) de fluido acoplado entre la otra de dichas plataformas (18) rotatoria y el miembro (20) de cuerpo y el mecanismo (56; 58; 60) de enlace "lazy tong" para variar el espaciamiento entre la pluralidad de tubos (62) rígidos.
8. El efector (10) terminal como en la reivindicación 7 en donde el mecanismo de enlace "lazy tong" comprende una pluralidad de pares de enlaces (56; 58; 60) diagonales, los miembros de cada par están pivotantemente unidos a sus centros y a un par adyacente de enlaces (56; 58; 60) diagonales en sus extremos, uno de la pluralidad de tubos (62) rígido está fijo al pivote que se une a los miembros (56; 58; 60) de enlace diagonal en sus centros.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]