Dispositivo, transmisión acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U).
1. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.
T.A.M.U.) caracterizado porque tiene:
a) Un eje de entrada, que puede ser múltiple o compuesto. (Árboles, etcétera).
b) Un eje de salida, que puede ser múltiple o compuesto. (Árboles, etcétera).
c) Al menos dos mecanismos de accionamiento o giro unidireccional, tales como ruedas libres (7a, 7b, 7c, 7d), mecanismos con trinquetes, rodamientos con embrague, etcétera.
d) Los medios de transmisión necesarios para vincular el eje de entrada (1) y el de salida (2). (Por ejemplo, engranajes, ruedas dentadas (3, 5), ruedas tipo piñón (4, 6), coronas, ruedas de fricción, cadenas (9), poleas, correas de transmisión, elementos de cremallera (32) muelles, sistemas hidráulicos, o similares a todos los anteriores, etcétera.
2. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) caracterizado porque dispone de una carcasa externa (8).
3. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicación 2, caracterizado porque la carcasa (8) es estanca y/o sumergible.
4. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado porque el medio de transmisión (4, 6 y 9) se sustituye por ruedas dentadas tales como (3a y 5a) y además, tiene un inversor de giro (15a).
5. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado porque el medio de transmisión, entre el eje de entrada (1) y el eje de salida (2), para uno de los sentidos está formado por un eje de transmisión (21) y las ruedas dentadas (13, 17) y (14, 19), y, un eje de transmisión (12) y los medios de vinculación (11, 15a, 16) y (20, 18) para el otro sentido de giro.
6. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicación anterior, caracterizado porque carece de las ruedas dentadas (17 y 20).
7. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones 1, 4, 5 y 6 caracterizado porque los medios de transmisión, se distinguen por ser una combinación de los medios anteriormente mencionados, como, por ejemplo, sustituyendo el medio de transmisión (11, 15a, 16), por el medio de transmisión (4, 6, 9).
8. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones 1, 4, 5, 6 y 7 caracterizado porque tiene un tercer elemento de forma tubular (10) para cada uno de los acoplamientos de los mecanismos de accionamiento o giro unidireccional.
9. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicación 5 y 8, caracterizado porque sólo tiene un eje de entrada (1), un eje de salida (2), un eje de transmisión (21). Y los medios de vinculación (22, 15a, 11), (13, 17) y (14, 19).
10. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicación 4, 5, 6, 7, 8 y 9 caracterizado porque también disponen de dos inversores de giro (15b, 15c) además de los que ya tienen (15a).
11. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones 4, 5, 6, 7, 8 y 10, caracterizado porque el eje de entrada (1) está unido al eje de salida (2) utilizando un eje tubular hueco o un árbol de transmisión (23), cardán, o similar, que dispone en cada uno de sus extremos, de un cojinete o un rodamiento de giro loco (24a y 24b).
12. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado porque los elementos motrices están acoplados al eje de entrada (1), directamente o utilizando un eje o árbol de transmisión que puede ser compuesto o múltiple, como, por ejemplo, el rotor de una turbina (25) acoplado en serie al eje de entrada (1).
13. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicación anterior caracterizado porque los elementos acoplado al eje de entrada (1) o al de salida (2) lo hacen de forma serie (figura 5), paralela (figura 8) o mixta, etcétera directa o indirectamente, por ejemplo, en paralelo, utilizando un medio de transmisión con un elemento de cremallera (31, 32).
14. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado porque el eje de entrada (1) es el eje de un elemento motriz, como, por ejemplo, el rotor de una turbina (25), el eje de una caja multiplicadora de velocidad (26).
15. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado porque el eje de salida (2) es el eje o parte móvil de un elemento o dispositivo generalmente pasivos, como por ejemplo, el eje acoplado a la parte móvil de un generador eléctrico, o rotor de un generador eléctrico (27).
16. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado porque el eje de entrada (1) está acoplado a una caja multiplicadora (26).
17. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado porque los medios de transmisión o vinculación mencionados dichas reivindicaciones entre los ejes de entrada (1), transmisión (12, 21) o salida (2), actúan como multiplicadores y/o reductores. Por ejemplo, de velocidad.
18. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado porque el elemento motriz es de tipo turbina (25), rotor, ruedas por ejemplo de molino o similares a todos los anteriores.
19. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicación anterior, caracterizado porque el D.T.A.M.U. (28) se encuentra integrado en un aerogenerador (29).
20. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicación 18, caracterizado porque el D.T.A.M.U. (28) se encuentra integrado en un OWC (30).
21. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones 1 a la 17, caracterizado porque el elemento motriz es de tipo pala, ala (34), plataforma o similares, colocadas en posición horizontal o vertical, sumergidas, flotantes o semi-sumergidas.
22. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones 18 a la 20, caracterizado porque dispone de al menos un generador eléctrico (27, 27a, 27b).
23. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado porque el elemento motriz es de tipo boya (33), o similares.
24. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicación anterior caracterizado porque la boya tiene o está unida a un contrapeso.
25. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado porque dispone de un volante de inercia (36) que tiene adaptado un mecanismo de giro unidireccional (7e).
26. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones 18 a la 25, caracterizado porque el objeto formado, tiene al menos un elemento motriz, dos D.T.A.M.U. (28a, 28b), dos cajas de acoplamientos (26a, 26b) y dos generadores eléctricos (27a y 27b).
27. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado porque el eje de entrada (1) es el de un elemento que puede ser un elemento motriz, por ejemplo el rotor de una turbina (25) o el eje de una caja multiplicadora (26).
28. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado porque el eje de salida (2) es el eje de un elemento que vamos a mover, por ejemplo, el eje rotor de un generador eléctrico (27).
29. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicación 20 a la 29, caracterizado porque el objeto formado se encuentra en una plataforma flotante (35a, 35b) o fija.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201400353.
Solicitante: RODRIGUEZ RAMIREZ, MARCO ANTONIO.
Nacionalidad solicitante: España.
Inventor/es: RODRIGUEZ RAMIREZ,MARCO ANTONIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H1/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › Transmisiones de engranajes para transmitir un movimiento rotativo (particulares para transmitir un movimiento rotativo con relación de velocidad variable, o para invertir el movimiento rotativo F16H 3/00).
Fragmento de la descripción:
Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.)
OBJETO DE LA INVENCIÓN
El objeto de este modelo de utilidad es el de acoplar fuerzas giratorias de magnitudes y sentidos diferentes sobre un mismo eje rotor y conseguir un movimiento unidireccional en un eje de salida.
CAMPO DE LA INVENCIÓN
El principal campo de aplicación de esta patente es la industria eléctrica, pero está intimamente ligado a la industria mecánica. Teniendo en cuenta que sus utilidades son múltiples. Por ejemplo, sirve como convertidor de movimientos lineales en movimientos giratorios.
ANTECEDENTES
Existen diversas solicitudes de patentes, varias patentes de invención y varias patentes de modelos de utilidad que utilizan sistemas de transmisión que acoplan movimientos bidireccionales para conseguir un movimiento unidireccional en un eje de salida. Por ejemplo, para la conversión de los movimientos en distintos sentidos en los que puede circular la energía undimotriz.
Entre ellas, podemos encontrar la patente WO2009101085A2 que es un dispositivo para la conversión de un movimiento bidireccional de rotación alrededor de dos ejes o de dos ejes de rotación en un movimiento de rotación unidireccional alrededor de un único eje. EE.UU 6247308 trata de un dispositivo de transmisión que convierte un movimiento de rotación alrededor de un primer eje, en un movimiento de rotación alrededor de un segundo eje, perpendicular al primer eje.
Tambien existen varias patentes y modelos de utilidad que pueden utilizar estas transmisiones u otras, y que hacen uso de boyas para aprovechar la energía de las olas, como, por ejemplo, la patente WO2008031549 A1, la patente WO2012152289A2 y la solicitud de patente WO2011126451A1, etcétera.
Un inconveniente de los sistemas y dispositivos unidireccionales que utilizan este tipo de transmisiones, es el de que, cuando en un dispositivo de acoplamiento o rotación unidireccional, tal como, ruedas libres, trinquetes, rodamientos con embrague se produce un giro en el sentido contrario en el que se encuentra bloqueado, se produce una inestabilidad en el sistema o en el objeto que puede ocasionar problemas, por ejemplo, si una turbina no se encuentra en un fluido líquido como el agua y utiliza este tipo de transmisiones, cuando ésta (turbina) se encuentra girando libremente, lo hará sin control, ocasionando una serie de inconvenientes.
Para aprovechar el movimiento de las olas para generar electricidad también se utilizan los OWC (Oscillating Water Column) los cuales utilizan turbinas bidireccionales como, por ejemplo, turbinas tipo Wells, estas turbinas, tienen alabes que giran para colocar la palas en la posicion adecuada en funcion de la direccion del fluido que las mueve.
No se conoce por parte del autor, de este modelo de utilidad, el uso de una turbina que, realizando diferentes fuerzas o movimientos de magnitudes y sentidos diferentes aplicados sobre un mismo eje rotor, ésta, consiga un movimiento unidireccional de la forma descrita, en un eje de salida sin necesidad del uso del giro de las aspas o similares.
DESCRIPCIÓN
El modelo de utilidad que presento, básicamente trata de un sistema de transmisión que tiene un eje de entrada, sobre el que se pueden aplicar movimientos y fuerzas de distinto sentido y magnitudes distintas (por ejemplo, movimientos bidireccionales producidos por las olas) , y la conversión de estos movimientos, en otros movimientos de un único sentido, transmitidos a un eje de salida. Se trata de un acoplamiento que podemos conformar como un dispositivo de acoplamiento y/o transmisión, o como un sistema de transmisión.
Principalmente el objeto se distingue por que tiene:
1) Un eje de entrada que puede ser múltiple o compuesto. (Árboles, etcétera) .
2) Un eje de salida que puede ser múltiple o compuesto. (Árboles, etcétera) .
3) Al menos dos dispositivos o mecanismos de acoplamiento o giro unidireccional, tales como ruedas libres, mecanismos con trinquetes, rodamientos con embrague, etcétera.
4) Los medios de transmisión necesarios para vincular los dos ejes (el de entrada y el de salida) . Por ejemplo, engranajes, ruedas dentadas, cadenas, correas de transmisión, cremalleras, etcétera.
5) Una carcaza externa de la transmisión, que no tiene que ser necesaria, pero que sirve para proteger dicho acoplamiento o transmisión, del entorno en donde se encuentre situado, por ejemplo, una caja estanca si dicha transmisión se encuentra en el mar.
La carcaza externa también sive para fijar los elementos y para su comercializacion, conformando un objeto de uso universal.
BREVE DESCRIPCIÓN DE LAS FIGURAS
Para facilitar la comprensión de este modelo de utilidad y de su funcionamiento, nos vamos ayudar de varias figuras que nos muestran de forma básica y general, unos ejemplos de diferentes formas de realización y del uso del objeto, aunque dichos ejemplos, no son limitativos, en modo alguno, a la hora de configurar el objeto de manera distinta a la que aquí se muestra. Dichas figuras no se encuentra realizadas a ninguna escala, para la mejor identificación de los componentes que las integran.
Las figuras 1, 2, 3 y 4 muestran una vista en perspectiva de cuatro formas diferentes de configurar el objeto, mostrando formas básicas y formas más complejas.
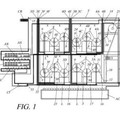
Las figuras 5, 6, 7 y 8 muestran una vista en perspectiva de diferentes maneras de formar un objeto para generación eléctrica.
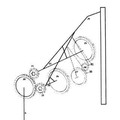
DESCRIPCIÓN DE UNA FORMA DE REALIZACIÓN (FIGURA 1)
Para esta forma de realización, presento la forma básica mínima, para formar el objeto. Ésta forma consiste en la configuración de éste acoplamiento por medio de una vinculación mixta entre los dos ejes (1, 2) , sin la utilización de inversores de giro.
Desde un eje de entrada (1) colocamos dos medios de transmisión (3 y 5) y (4, 9 y 6) hasta el eje de salida (2) .
Para mayor detalle de esta forma de realización, en un eje de entrada (1) situamos dos elementos adecuados para transmitir el movimiento efectuado en dicho eje (1) , en este caso, una rueda dentada (3) o de engranaje, y además, a una distancia mínima necesaria, situamos una polea u otra rueda dentada, o de engranaje tipo piñón (4) .
En un eje de salida (2) , colocamos una rueda dentada (5) y otra rueda dentada, de engranaje tipo piñón (6) a los que les acoplamos un mecanismo de giro o accionamiento unidireccional, en este caso, dos mecanismos de ruedas libres (7a y 7b) . Estos mecanismos de accionamiento o giro unidireccional (7a y 7b) están colocados para que ambos apliquen la fuerza en el eje en el que se encuentren, en el mismo sentido que en el que queremos que gire el eje de salida.
Para una corta explicación, diré que un dispositivo de acoplamiento unidireccional como al que me refiero, es un dispositivo que se bloquea cuando se le aplica una fuerza en un sentido, y, que no se bloquea, girando libremente, cuando se aplica una fuerza en sentido contrario al anterior.
Para esta forma de realización la transmisión del movimiento entre (3) y (5) es directa, y para (4) y
(6) es por medio de una cadena (9) , aunque ésta puede ser una correa de transmisión, elementos de cremalleras u otros, en función del medio de transmisión.
El funcionamiento es el siguiente: Cuando sobre el eje de entrada (1) aplicamos una fuerza giratoria en un sentido, la rueda dentada (3) transmite el movimiento a la otra rueda dentada (5) haciendo que el eje de salida (2) gire en sentido contrario al del eje de entrada (1) .
Por ejemplo, si giramos hacia la derecha el eje de entrada (1) el eje de salida (2) girará hacia la izquierda.
Cuando giramos el eje de entrada (1) hacia la izquierda éste moverá la rueda dentada o engranaje tipo piñón (4) transmitiendo el movimiento por medio de la cadena (9) hasta el engranaje piñón (6) moviendo así, el eje de salida (2) también hacia la izquierda.
En otra forma de realización, podemos situar dos mecanismos de giro unidireccional, colocados, uno (7c) , en la rueda dentada (3) , para que, el anillo interno de la rueda libre bloquee en el mismo sentido que los anillos internos de los mecanismos de giro unidireccional (7a y 7b) , y otro (7d) situado en el piñón (4) de manera que el anillo interno bloquee en sentido contrario que los anillos internos de los mecanismos de giro unidireccional (7a y 7b) , evitando rozamientos innecesarios entre las ruedas dentadas (3 y 5) , mejorando el rendimiento e impidiendo movimientos o desplazamientos también innecesarios.
Para una mejor fijación de los mecanismos de giro unidireccional situados en...
Reivindicaciones:
1. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) caracterizado por que tiene:
a) Un eje de entrada, que puede ser múltiple o compuesto. (Árboles, etcétera) .
b) Un eje de salida, que puede ser múltiple o compuesto. (Árboles, etcétera) .
c) Al menos dos mecanismos de accionamiento o giro unidireccional, tales como ruedas libres (7a, 7b, 7c, 7d) , mecanismos con trinquetes, rodamientos con embrague, etcétera.
d) Los medios de transmisión necesarios para vincular el eje de entrada (1) y el de salida (2) . (Por ejemplo, engranajes, ruedas dentadas (3, 5) , ruedas tipo piñón (4, 6) , coronas, ruedas de fricción, cadenas (9) , poleas, correas de transmisión, elementos de cremallera (32) muelles, sistemas hidráulicos, o similares a todos los anteriores, etcétera.
2. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) caracterizado por que dispone de una carcaza externa (8) .
3. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicacion 2, caracterizado por que la carcaza (8) es estanca y/o sumergible.
4. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado por que el medio de transmisión (4, 6 y 9) se sustituye por ruedas dentadas tales como (3a y 5a) y además, tiene un inversor de giro (15a) .
5. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado por que el medio de transmisión, entre el eje de entrada (1) y el eje de salida (2) , para uno de los sentidos está formado por un eje de transmisión (21) y las ruedas dentadas (13, 17) y (14, 19) , y, un eje de transmisión (12) y los medios de vinculación (11, 15a, 16) y (20, 18) para el otro sentido de giro.
6. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicacion anterior, caracterizado por que carece de las ruedas dentadas (17 y 20) .
7. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones 1, 4, 5 y 6 caracterizado por que los medios de transmisión, se distinguen por ser una combinación de los medios anteriormente mencionados, como, por ejemplo, sustituyendo el medio de transmisión (11, 15a, 16) , por el medio de transmisión (4, 6, 9) .
8. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones 1, 4, 5, 6 y 7 caracterizado por que tiene un tercer elemento de forma tubular (10) para cada uno de los acoplamientos de los mecanismos de accionamiento o giro unidireccional.
9. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicacion 5 y 8, caracterizado por que sólo tiene un eje de entrada (1) , un eje de salida (2) , un eje de transmisión (21) . Y los medios de vinculación (22, 15a, 11) , (13, 17) y (14, 19) .
10. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicación 4, 5, 6, 7, 8 y 9 caracterizado por que tambien disponen de dos inversores de giro (15b, 15c) además de los que ya tienen (15a) .
11. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones 4, 5, 6, 7, 8 y 10, caracterizado por que el eje de entrada (1) está unido al eje de salida (2) utilizando un eje tubular hueco ó un árbol de transmisión (23) , cardán, o similar, que dispone en cada uno de sus extremos, de un cojinete o un rodamiento de giro loco (24a y 24b) .
12. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado por que los elementos motrices
estan acoplados al eje de entrada (1) , directamente o utilizando un eje o árbol de transmisión que puede ser compuesto o múltiple, como, por ejemplo, el rotor de una turbina (25) acoplado en serie al eje de entrada (1) .
13. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicación anterior caracterizado por que los elementos acoplado al eje de entrada (1) o al de salida (2) lo hacen de forma serie (figura 5) , paralela (figura 8) o mixta, etcétera directa o indirectamente. Por ejemplo, en paralelo, utilizando un medio de transmisión con un elemento de cremallera (31, 32) .
14. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado por que el eje de entrada (1) es el eje de un elemento motriz, como, por ejemplo, el rotor de una turbina (25) , el eje de una caja multiplicadora de velocidad (26) .
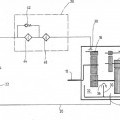
15. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado por que el eje de salida (2) es un eje,
o eje acoplado a la parte móvil de un elemento o dispositivo generalmente pasivos, como por ejemplo, el eje acoplado a la parte móvil de un generador eléctrico, o rótor de un generador eléctrico (27) .
16. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado por que el eje de entrada (1) está acoplado a una caja multiplicadora (26) .
17. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado por que los medios de transmisión o vinculación mencionados dichas reivindicaciones entre los ejes de entrada (1) , transmisión (12, 21) o salida (2) , actúan como multiplicadores y/o reductores. Por ejemplo, de velocidad.
18. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado por que el elemento motriz es de tipo turbina (25) , rotor, ruedas por ejemplo de molino o similares a todos los anteriores.
19. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicacion anterior, caracterizado por que el D.T.A.M.U. (28) se encuentra integrado en un aerogenerador (29) .
20. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicacion 18, caracterizado por que el D.T.A.M.U. (28) se encuentra integrado en un O.W.C. (30) .
21. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones 1 a la 17, caracterizado por que el elemento motriz es de tipo pala, ala (34) , plataforma o similares, colocadas en posición horizontal o vertical, sumergidas, flotantes o semi-sumergidas.
22. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones 18 a la 20, caracterizado por que dispone de al menos un generador eléctrico (27, 27a, 27b) .
23. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado por que el elemento motriz es de tipo boya (33) , o similares.
24. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicación anterior caracterizado por que la boya tiene o está unida a un contrapeso.
25. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado por que dispone de un volante de inercia (36) que tiene adaptado un mecanismo de giro unidireccional (7e) .
26. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones 18 a la 25, caracterizado por que el objeto formado, tiene al menos un elemento motriz, dos D.T.A.M.U. (28a, 28b) , dos cajas de acoplamientos (26a, 26b) y dos generadores eléctricos (27a y 27 b) .
27. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado por que el eje de entrada (1) es el de un elemento que puede ser un elemento motriz, por ejemplo el rotor de una turbina (25) o un eje o árbol acoplado al eje de una caja multiplicadora (26) .
28. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicaciones anteriores, caracterizado por que el eje de salida (2) es el eje de un elemento que vamos a mover, por ejemplo, el eje rótor de un generador eléctrico (27) .
29. Dispositivo, transmisión y acoplamiento mecánico universal de fuerzas de magnitudes y sentidos diferentes (D.T.A.M.U.) según reivindicacion 20 a la 29, caracterizado por que el objeto formado se encuentra en una plataforma flotante (35a, 35b) o fija.
Patentes similares o relacionadas:
MECANISMO DE TRANSMISIÓN, del 1 de Febrero de 2019, de TEAMSTONE HISPANIA S.A: 1. Mecanismo de transmisión, del tipo que se vincula a un elemento motriz y a un elemento receptor al que transmite un movimiento, siendo este […]
CONEXIÓN PARA EJES ALINEADOS, del 11 de Diciembre de 2018, de RIERA VILADEVALL, Bru: 1. Conexión para ejes alineados, o coaxiales, formada por un primer eje en cuyo extremo se embute el extremo de un segundo eje , y […]
Instalación de recubrimiento en vacío en-línea, del 20 de Mayo de 2015, de FHR Anlagenbau GmbH: Instalación de recubrimiento en vacío en-línea con una cámara de recubrimiento en vacío con al menos una unidad de recubrimiento así como […]
 Producción de energía con coste cero, mejorada, del 27 de Febrero de 2015, de GARCIA GARRIDO , Pedro: El invento consiste en un aparato que transforma el movimiento pendular bidireccional de la patente "producción de energía con coste cero" […]
Producción de energía con coste cero, mejorada, del 27 de Febrero de 2015, de GARCIA GARRIDO , Pedro: El invento consiste en un aparato que transforma el movimiento pendular bidireccional de la patente "producción de energía con coste cero" […]
Dentado de engranaje cónico optimizado en la capacidad de carga, del 17 de Diciembre de 2014, de SCHOTTEL GMBH: Engranaje cónico de una caja de engranajes cónicos, cuyos dientes presentan respectivamente un flanco de carga y un flanco trasero, * […]
 CENTRAL PARA PRODUCCIÓN DE ENERGÍA ELÉCTRICA, del 13 de Julio de 2012, de PÉREZ FERNÁNDEZ, LUCIO: Central para producción de energía eléctrica.
La central tiene dos sistemas de producción (S), dispuestos en paralelo de manera redundante sobre […]
CENTRAL PARA PRODUCCIÓN DE ENERGÍA ELÉCTRICA, del 13 de Julio de 2012, de PÉREZ FERNÁNDEZ, LUCIO: Central para producción de energía eléctrica.
La central tiene dos sistemas de producción (S), dispuestos en paralelo de manera redundante sobre […]
Diferencial para vehículo automóvil., del 16 de Abril de 2006, de PEUGEOT CITROEN AUTOMOBILES SA: Diferencial para vehículo automóvil, que incluye una caja de diferencial que puede ser arrastrada por una corona solidaria de la caja , […]
 DISPOSITIVO DE LUBRICACIÓN, del 27 de Abril de 2011, de HYDAC FILTERTECHNIK GMBH: Dispositivo de lubricación para engranajes , en especial para instalaciones de energía eólica, con al menos dos etapas de engranaje dispuestas una junto a […]
DISPOSITIVO DE LUBRICACIÓN, del 27 de Abril de 2011, de HYDAC FILTERTECHNIK GMBH: Dispositivo de lubricación para engranajes , en especial para instalaciones de energía eólica, con al menos dos etapas de engranaje dispuestas una junto a […]