DISPOSITIVO Y PROCEDIMIENTO PARA EL REGISTRO DE IMÁGENES DE OBJETOS DESPLAZADOS SOBRE UN DISPOSITIVO DE TRANSPORTE.
Dispositivo, en especial lector de códigos, para el registro de imágenes de objetos (14) desplazados sobre un dispositivo (12) de transporte,
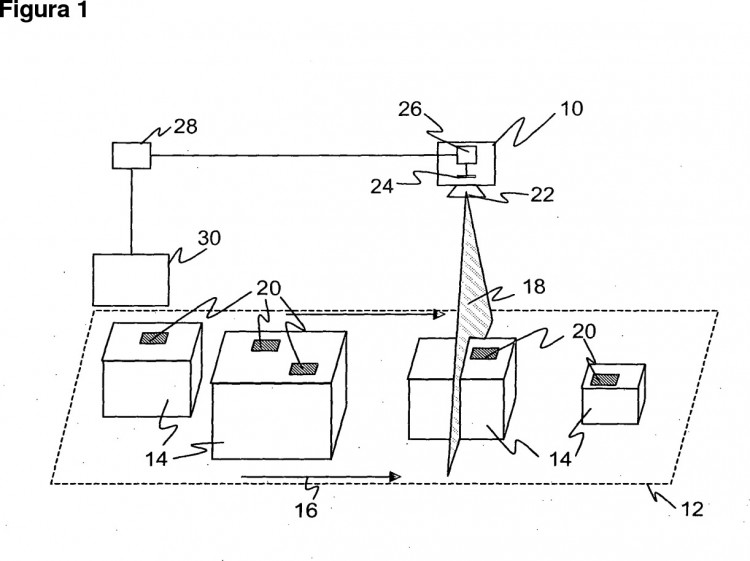
poseyendo el dispositivo un sensor (10) de líneas, en especial una cámara de líneas, que pueda explorar línea a línea los objetos para generar datos de imagen así como un dispositivo (26; 30) de determinación de la velocidad, que puede determinar la velocidad de desplazamiento de los objetos (14) con relación al sensor (10) de líneas o el camino recorrido por ellos, estando prevista una unidad (26) de evaluación configurada para adaptar la frecuencia de registro del sensor (10) de líneas a la velocidad de desplazamiento, caracterizado porque el dispositivo (30) de determinación de la velocidad es un mando del transportador del dispositivo (12) de transporte, que anticipa el perfil de velocidades del dispositivo (12) de transporte y en el que el mando (30) del transportador puede transferir los datos del perfil de velocidad a la unidad (26) de evaluación
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08105234.
Solicitante: SICK AG.
Nacionalidad solicitante: Alemania.
Dirección: ERWIN-SICK-STRASSE 1 79183 WALDKIRCH ALEMANIA.
Inventor/es: REICHENBACH, JURGEN, GEHRING, ROLAND, HEIZMANN,REINHARD, Schöpflin,Uwe, Nopper,Richard.
Fecha de Publicación: .
Fecha Solicitud PCT: 4 de Septiembre de 2008.
Clasificación Internacional de Patentes:
- B07C3/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B07 SEPARACION DE SOLIDOS; CLASIFICACION. › B07C CLASIFICACION POSTAL; CLASIFICACION DE OBJETOS INDIVIDUALES O DE UN MATERIAL A GRANEL MANIPULABLE PIEZA POR PIEZA COMO OBJETOS INDIVIDUALES (especialmente adaptada a un fin determinado previsto en otra clase, ver la clase apropiada, p. ej. A43D 33/06, B23Q 7/12). › B07C 3/00 Clasificación de correo o documentos según el destino. › utilizando medios de detección fotosensibles.
- G06K7/10S4D
- G06K7/10S8
Clasificación PCT:
- G06K7/10 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › G06K 7/00 Métodos o disposiciones para la lectura de soportes de registro (G06K 9/00 tiene prioridad; métodos o disposiciones para marcar los soportes de registro en forma digital G06K 1/00). › por radiación electromagnética, p. ej. lectura óptica; por radiación corpuscular.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356996_T3.pdf
Fragmento de la descripción:
El invento se refiere a un dispositivo según el preámbulo de la reivindicación 1 para el registro de imágenes de objetos desplazados sobre un dispositivo de transporte y a un procedimiento correspondiente según el preámbulo de la reivindicación 13.
Para la automatización de aplicaciones logísticas, por ejemplo la clasificación automática de objetos, se proveen 5 los objetos de un código, que es leído por un lector de códigos. Una aplicación práctica frecuente son los códigos de barras con los correspondientes escaneadores de barras. Sin embargo, para la identificación también se utilizan otras codificaciones, por ejemplo códigos bidimensionales como un Maxicode o un código Aztec o rotulaciones, que se descodifican con un lector óptico de caracteres (OCR). Para leer estos códigos se registran imágenes de los objetos con los códigos. 10
En un dispositivo de lectura con funcionamiento automático, por ejemplo en la gestión de equipajes en un aeropuerto o en la clasificación automática de paquetes en centros logísticos, se transportan los objetos por delante del lector de códigos y se obtiene datos de imagen de los objetos con los códigos dispuestos en ellos por medio de una exploración por líneas.
El dispositivo de transporte sobre el que se desplazan los objetos no se desplaza siempre con una velocidad 15 uniforme. Este es en especial el caso de los clasificadores de bandejas en los que una bandeja del dispositivo de transporte sólo recoge un objeto. Al cargar uno de estos clasificadores de bandejas se transportan los objetos hasta la bandeja por medio de cintas de inserción. Si en un determinado momento no hay una bandeja libre es preciso retardar o detener la cinta de inserción. Un lector de códigos montado por encima de la cinta de inserción, que explora entonces los objetos línea a línea sólo suministra en este caso imágenes distorsionadas, ya que el movimiento del objeto con relación 20 al lector de códigos es irregular. Este problema no sólo surge en las cintas de inserción, sino también con cualquier variación de la velocidad del transportador sobre el que se hallen los objetos. Las distorsiones de los datos de imagen registrados dificultan, sin embargo, la descodificación, en especial cuando los programas convencionales de lectura óptica de caracteres deben evaluar las imágenes para descodificar un rótulo o una dirección.
A través del documento EP 0 833 270 A2 se conoce una cámara de líneas para el registro de información 25 dispuesta sobre objetos, que se transportan sobre una cinta transportadora. La frecuencia de repetición de imagen de la cámara de líneas y la velocidad de transporte del dispositivo de avance están compaginadas y es gobernable.
El documento EP 0 204 516 A2 divulga un robot con una cámara de líneas para la identificación de objetos. El avance de los objetos es medido con un codificador y sólo se registra una línea de imagen, cuando se alcanza un determinado avance. 30
El objeto del invento es por ello perfeccionar un escaneador de códigos con obtención línea a línea de los datos de la imagen en el sentido de que suministre imágenes no distorsionadas o menos distorsionadas.
Este problema se soluciona con un dispositivo y con un procedimiento para el registro de imágenes según la reivindicación 1, respectivamente 13. Adaptando la frecuencia de registro del sensor de líneas a la velocidad de desplazamiento se puede mantener la resolución de los datos de la imagen independiente del perfil del movimiento. Las 35 evaluaciones posteriores de la imagen, incluida la descodificación o la lectura óptica de caracteres pueden trabajar con imágenes libres de perturbaciones, distorsiones u otros factores debidos a la velocidad de transporte variable. Con ello se simplifica la evaluación y, sobre todo, se evitan lecturas erróneas, incrementando con ello la tasa de lectura, de manera, que es menos frecuente el laborioso y caro tratamiento manual adicional de la clasificación automatizada.
El invento parte para ello del principio de la identificación de perturbaciones en el desarrollo uniforme del 40 movimiento del dispositivo de transporte y de reaccionar frente a ellas. La densidad de las líneas de imagen registradas ya no depende entonces de la velocidad del transportador, sino en última instancia del camino transportado de los objetos, que representa la medida correcta para una imagen sin distorsiones y con una resolución uniforme. El dispositivo de determinación de la velocidad puede ser entendido también en el sentido de que indica el camino recorrido sin una relación directa al tiempo. Dado que a pesar de ello se establece por medio de la frecuencia de registro una relación con 45 el tiempo, también se recurre en este caso en última instancia a una medida de la velocidad.
La unidad de evaluación es configurada con preferencia para adaptar la frecuencia de registro de modo adaptivo de tal manera, que el sensor de líneas registre los datos de imagen de líneas equidistantes. La referencia es aquí el objeto con relación a de su velocidad de transporte y las líneas de imagen se reparten de esta manera de modo equidistante y con ello uniformemente sobre el objeto, lo que significa una resolución uniforme de la imagen en la 50 dirección transversal a las líneas, que equivale a una imagen, que se registró en una situación ficticia con una velocidad de transporte uniforme y con una frecuencia de registro constante. La evaluación es con ello independiente de perturbaciones debidas a variaciones de la velocidad de transporte.
En una forma de ejecución preferida se configura el sensor de líneas para que pueda ser ajustado a una frecuencia de registro básica con los correspondientes parámetros de registro, que equivale en especial a una velocidad 55 de transporte máxima del dispositivo de transporte y la unidad de evaluación se diseña para anticipar al sensor de líneas de manera diferencial la adaptación de la frecuencia de registro y/o de los parámetros de registro con relación a la
velocidad del movimiento variada frente a la velocidad de transporta máxima. Estos parámetros de registro pueden ser la luminosidad, factores de refuerzo, tiempos de exposición o análogos. Por lo tanto, el sistema está diseñado para un ajuste básico, que equivale al estado usual del transportador, que funciona sin perturbaciones. Según el invento, en este estado básico no es precisa una intervención . Sólo cuando se detecta una velocidad de transporte distinta del estado básico se procede a una adaptación de la frecuencia y eventualmente también se modifica uno o cualquier otro 5 parámetro dependiente de la frecuencia, por ejemplo se acorta el tiempo de exposición para la adaptación a una frecuencia de registro más alta y se incrementa correspondientemente la amplificación.
El dispositivo de determinación de la velocidad es en una forma de ejecución ventajosa un transmisor de caminos, un transmisor incremental u otro sensor antepuesto al sensor de líneas. Con frecuencia se integra en el transportador un sensor de esta clase para detectar la velocidad por razones independientes de la lectura del código. Si 10 el sensor de líneas conoce a su debido tiempo la velocidad, se puede planificar a priori y ejecutar después la adaptación de la frecuencia de registro. Un transmisor de caminos indica el tamaño del camino de transporte desde el último registro. Esta información puede ser aprovechada para determinar el instante del registro de la línea siguiente y es con ello una medida de la frecuencia de registro correcta.
De manera alternativa, el dispositivo de determinación de la velocidad es un mando del transportador del 15 dispositivo de transporte, que en especial anticipa el perfil de velocidad del dispositivo de transporte y el mando del transportador puede transmitir a la unidad de evaluación datos del perfil de la velocidad, que contengan en especial una velocidad actual, una duración de una fase de aceleración siguiente, un comienzo de la fase de aceleración y/o una velocidad final después de finalizar la fase de aceleración. Aquí y en lo que sigue se debe entender “aceleración” en el sentido físico, incluyendo, por lo tanto, un retardo, respectivamente frenado en el caso de una aceleración negativa. 20 Además, una fase de aceleración es, en el caso de una aceleración constante, sobredefinida con la velocidad inicial, la velocidad final, el comienzo y la duración de la fase de aceleración, siendo por lo tanto suficiente la transferencia de sólo una parte de estos parámetros. Si los datos de una... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo, en especial lector de códigos, para el registro de imágenes de objetos (14) desplazados sobre un dispositivo (12) de transporte, poseyendo el dispositivo un sensor (10) de líneas, en especial una cámara de líneas, que pueda explorar línea a línea los objetos para generar datos de imagen así como un dispositivo (26; 30) de determinación de la velocidad, que puede determinar la velocidad de desplazamiento de los objetos (14) con relación al sensor (10) de 5 líneas o el camino recorrido por ellos, estando prevista una unidad (26) de evaluación configurada para adaptar la frecuencia de registro del sensor (10) de líneas a la velocidad de desplazamiento, caracterizado porque el dispositivo (30) de determinación de la velocidad es un mando del transportador del dispositivo (12) de transporte, que anticipa el perfil de velocidades del dispositivo (12) de transporte y en el que el mando (30) del transportador puede transferir los datos del perfil de velocidad a la unidad (26) de evaluación. 10
2. Dispositivo, en especial lector de códigos, para el registro de imágenes de objetos (14) desplazados sobre un dispositivo (12) de transporte, poseyendo el dispositivo un sensor (10) de líneas, en especial una cámara de líneas, que pueda explorar línea a línea los objetos para generar datos de imagen así como un dispositivo (26; 30) de determinación de la velocidad, que puedas determinar la velocidad de desplazamiento de los objetos (14) con relación al sensor (10) de líneas o el camino recorrido por ellos, estando prevista una unidad (26) de evaluación configurada para adaptar la 15 frecuencia de registro del sensor (10) de líneas a la velocidad de desplazamiento, caracterizado porque la unidad (26) de evaluación está implementada, al menos en parte, en un componente lógico programable, en especial un FPGA, del sensor (10) de líneas y porque el sensor (10) de líneas posee al menos una entrada con la que se puede ordenar al componente lógico que arranque y realice la adaptación de la frecuencia de registro para un perfil de velocidad prefijado.
3. Dispositivo según la reivindicación 1 ó 2, en el que la unidad (26) de evaluación se configura para adaptar la 20 frecuencia de registro de tal modo, que el sensor (10) de líneas registre datos de imagen de líneas equidistantes del objeto (14).
4. Dispositivo según una de las reivindicaciones 1 a 3, en el que el sensor (10) de líneas se diseña para ser ajustado en una frecuencia de registro básica con los correspondientes parámetros de registro, que equivale en especial a una velocidad de transporte máxima del dispositivo (12) de transporte y en el que la unidad (26) de evaluación se 25 diseña para anticipar al sensor (10) de líneas de manera diferencial la adaptación de la frecuencia de registro y/o de los parámetros de registro a una velocidad de desplazamiento modificada con relación a la velocidad de transporte máxima.
5. Dispositivo según una de las reivindicaciones 2 a 4, en el que el dispositivo (26; 30) de determinación de la velocidad es un transmisor de caminos, un transmisor incremental u otro sensor antepuesto al sensor (10) de líneas y/o el dispositivo (12) de transporte es un transportador de bandejas o su cinta de inserción. 30
6. Dispositivo según una de las reivindicaciones precedentes en el que los datos del perfil de velocidad contienen una velocidad actual, una duración de una fase de aceleración siguiente y/o una velocidad final después de finalizar la fase de aceleración.
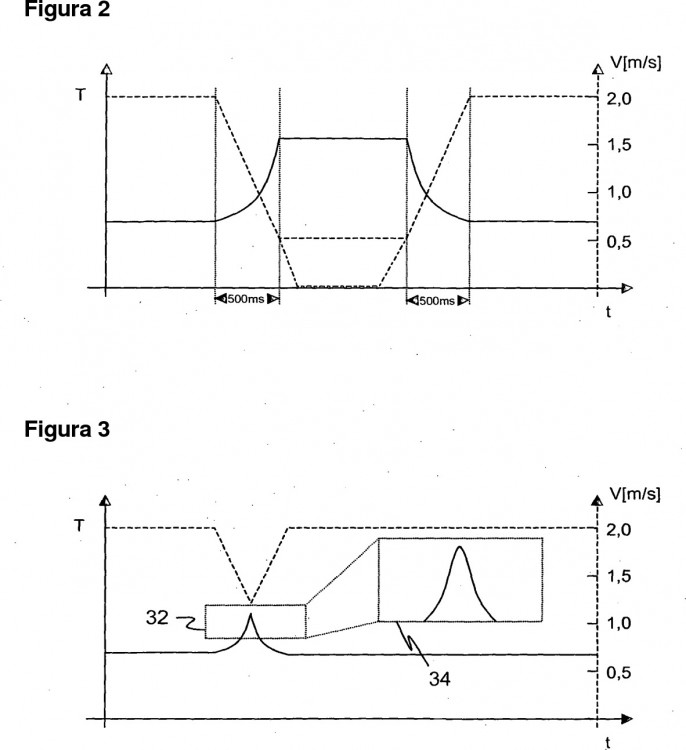
7. Dispositivo según la reivindicación 1, en el que el mando (30) del transportador está configurado para el ajuste de una velocidad de transporte máxima de 2 m/s, una velocidad de transporte retardada de 0,5 m/s así como una 35 fase de aceleración de 500 ms con una aceleración de 3 m/s2 de la velocidad de transporte máxima a la velocidad retardada e inversamente.
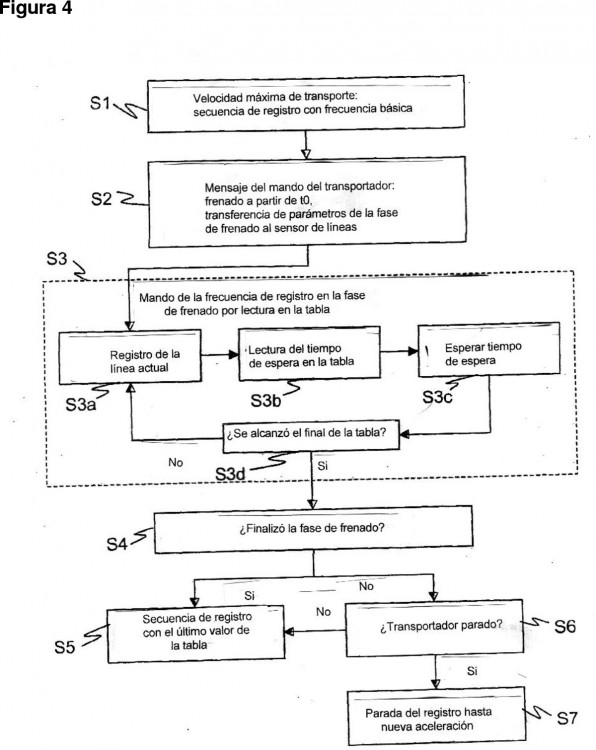
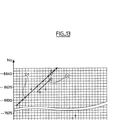
8. Dispositivo según una de las reivindicaciones precedentes en el que en la unidad (26) de evaluación se almacena en una tabla la frecuencia de registro, que varía en función del tiempo para un perfil de velocidad prefijado de un objeto (14), como intervalo de tiempo entre cada dos registros, describiendo las anotaciones en la tabla en especial 40 una hipérbola.
9. Dispositivo según la reivindicación 8, en el que la unidad (26) de evaluación se configura para que las anotaciones en la tabla sean predeterminadas, en especial por introducción o lectura o se calculan por medio de un perfil de velocidad preestablecido, en especial como hipérbola de una velocidad de transporte máxima, una velocidad de transporte retardada así como una fase de aceleración uniforme entre ellas, representada por el tiempo de inicio, el 45 tiempo final y/o la aceleración.
10. Dispositivo según la reivindicación 8 ó 9, en el que la unidad (26) de evaluación se configura para utilizar varias veces un valor de la tabla con el fin de crear fases de aceleración más largas y/o dar lugar a un parada del registro del sensor (10) de líneas, cuando la velocidad de desplazamiento es cero, es decir, cuando el dispositivo (12) de transporte está parado. 50
11. Dispositivo según una de las reivindicaciones 8 a 10, en el que en la unidad (26) de evaluación se prevé una tabla adicional, que contiene intervalos de tiempo para la frecuencia de registro para el caso de que en una fase de aceleración cambie el signo, es decir tenga lugar una inversión de la aceleración para garantizar una transición suave de los intervalos de tiempo.
12. Procedimiento para el registro de imágenes de objetos (14) desplazados sobre un dispositivo (12) de 55 transporte y para la descodificación de códigos (20) dispuestos sobre los objetos (14), siendo explorados los objetos (14)
línea a línea para generar los datos de imagen y en el que se determina la velocidad de desplazamiento de los objetos (14) con relación al sensor (10) de líneas o el camino recorrido, adaptando la frecuencia de registro de la exploración línea a línea a la velocidad de desplazamiento, caracterizado porque al dispositivo (12) de transporte se anticipa un perfil de velocidades y porque el perfil de velocidades es utilizado para la adaptación de la frecuencia de registro.
13. Procedimiento según la reivindicación 12, en el que las líneas de exploración se hallan repartidas de manera 5 equidistante sobre el objeto (14) y/o en el que el perfil de velocidad contiene una velocidad actual, una duración de una fase de aceleración siguiente, un comienzo de la fase de aceleración y/o una velocidad final después de finalizar la fase de aceleración y en el que se prevé en especial una velocidad de transporte máxima de 2 m/s, una velocidad de transporte retardada de 0,5 m/s así como una fase de aceleración de 500 ms con una aceleración de 3 m/s2 de la velocidad de transporte máxima a la velocidad retardada e inversamente. 10
14. Procedimiento según la reivindicación 12 ó 13 en el que la frecuencia de registro, que varía en el tiempo, se almacena para un perfil de velocidad preestablecido de un objeto (14) como intervalos de tiempo entre cada dos registros en una tabla, en el que las anotaciones en la tabla describen en especial una hipérbola y se calculan a partir de una velocidad de transporte máxima, una velocidad de transporte retardada así como una fase uniforme de aceleración entre ellas, que son representadas por un tiempo de inicio, un tiempo final y/o una aceleración. 15
15. Procedimiento según una de las reivindicaciones 12 a 14, en el que un valor de la tabla es utilizado varias veces para generar fases de aceleración más largas y/o en el que se provoca una parada del registro, cuando la velocidad de desplazamiento es cero, es decir, que se para el dispositivo (12) de transporte y/o en el que se prevé una tabla adicional, que contiene intervalos de tiempo para la frecuencia de registro para el caso de que una fase de aceleración cambie de signo, es decir, que se produzca un a inversión de la aceleración, para garantizar una transición 20 suave de los intervalos de tiempo.
Patentes similares o relacionadas:
Método para clasificar unos artículos de correo preclasificados, del 16 de Agosto de 2017, de SOLYSTIC: Método para clasificar en una máquina de clasificación postal unos artículos de correo (P), que comprende las etapas que consisten en […]
Procedimiento de clasificación postal con recuperación de las informaciones de procesamiento del usuario entre los pases de clasificación, del 19 de Noviembre de 2014, de SOLYSTIC: Procedimiento de clasificación postal según el cual unos artículos de correo (P) efectúan al menos dos pases de clasificación en la máquina para ser […]
 Procedimiento para la parametrización automática de sistemas de medida, del 12 de Septiembre de 2012, de SICK AG: Procedimiento para la parametrización automática de sistemas de medida para realizar la medición de objetostransportados mediante una instalación de transporte , […]
Procedimiento para la parametrización automática de sistemas de medida, del 12 de Septiembre de 2012, de SICK AG: Procedimiento para la parametrización automática de sistemas de medida para realizar la medición de objetostransportados mediante una instalación de transporte , […]
 Procedimiento para la clasificación de varios objetos con un análisis de informaciones, del 25 de Abril de 2012, de SOLYSTIC: Procedimiento para la clasificación de varios objetos (A, B, C) en el cual cada objeto tiene una superficie provista de una indicación de punto de encauzamiento […]
Procedimiento para la clasificación de varios objetos con un análisis de informaciones, del 25 de Abril de 2012, de SOLYSTIC: Procedimiento para la clasificación de varios objetos (A, B, C) en el cual cada objeto tiene una superficie provista de una indicación de punto de encauzamiento […]
PROCEDIMIENTO PARA LA CLASIFICACIÓN DE ENVÍOS POSTALES QUE INCLUYE UNA GESTIÓN OPTIMIZADA DEL ESPACIO DE EXPLORACIÓN DE LAS FIRMAS DE ENVÍOS, del 9 de Enero de 2012, de SOLYSTIC: Procedimiento para la clasificación de envíos postales en al menos dos pasadas de clasificación por máquina de clasificación con unas salidas de clasificación […]
DISPOSITIVO DE ADQUISICIÓN DE IMÁGENES DE ENVÍOS POSTALES QUE COMPRENDEN MARCAS FLUORESCENTES Y MARCAS DE CONTRASTE, del 7 de Septiembre de 2011, de SOLYSTIC: Un dispositivo de adquisición de imágenes de envíos postales (P), que comprende una caja en la que se disponen: - una primera cámara para la adquisición de una […]
 PROCEDIMIENTO PARA TRATAMIENTO DE ENVÍOS, INCLUYENDO UNA CLASIFICACIÓN GRÁFICA DE LAS FIRMAS ASOCIADAS A LOS ENVÍOS, del 26 de Noviembre de 2010, de SOLYSTIC: Procedimiento de tratamiento de envíos postales (P), en el que en una primera pasada de selección de los envíos se forma una imagen numérica de la superficie de cada […]
PROCEDIMIENTO PARA TRATAMIENTO DE ENVÍOS, INCLUYENDO UNA CLASIFICACIÓN GRÁFICA DE LAS FIRMAS ASOCIADAS A LOS ENVÍOS, del 26 de Noviembre de 2010, de SOLYSTIC: Procedimiento de tratamiento de envíos postales (P), en el que en una primera pasada de selección de los envíos se forma una imagen numérica de la superficie de cada […]
PROCEDIMIENTO DE TRATAMIENTO DE ENVIOS POSTALES CON UNOS CÓDIGOS DE CLIENTE ASOCIADOS A UNAS IMPRESIONES NUMÉRICAS, del 13 de Junio de 2011, de SOLYSTIC: Procedimiento para el tratamiento de envíos postales (P) en el cual los códigos de identificación del cliente (CAI) se atribuyen a los envíos por un remitente […]