Dispositivo y procedimiento para determinar un rasgo de un vehículo.
Dispositivo para determinar un rasgo característico (M) de un vehículo (2) que viaja por una vía (5),
con:
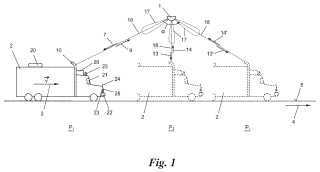
un detector (8), que está colocado sobre y/o al lado de la vía (5), dirigido hacia la vía (5), y configurado para medir el vector de movimiento (3) del vehículo (2) en una ubicación actual (P1) en un momento actual (t1), una unidad de seguimiento (11), conectada al detector (8), para calcular una ubicación de destino (P2) del vehículo (2) en un tiempo teórico (t2) basado en la ubicación actual (P1), el tiempo actual (t1) y el vector de movimiento (3), un primer sensor de radar (6), unido al detector (8), para transmitir un primer haz de radar (7) dirigido hacia la ubicación actual (P1), recibir un primer haz de radar reflejado (9) y determinar un primer espectro de frecuencia (F1) del mismo,
un segundo sensor de radar (12), unido a la unidad de seguimiento (11), para transmitir un segundo haz de radar (13), dirigido hacia la ubicación de destino (P2) en el tiempo teórico (t2), recibir un segundo haz de radar reflejado (14) y determinar un segundo espectro de frecuencia (F2) del mismo, y
una unidad de evaluación (19) para generar el rasgo característico (M) del vehículo (2) a partir de los espectros de frecuencia determinados (F1, F2), caracterizado por que los espectros de frecuencia (Fj) forman el rasgo característico (M) como una superficie (26) sobre un plano frecuencia/tiempo.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13167406.
Solicitante: KAPSCH TRAFFICCOM AG.
Nacionalidad solicitante: Austria.
Dirección: Am Europlatz 2 1120 Wien AUSTRIA.
Inventor/es: NAGY, OLIVER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/06 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › Sistemas que determinan los datos de posición de un blanco.
- G01S13/92 G01S 13/00 […] › para la medición de la velocidad.
- G01S7/41 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › que utilizan el análisis de la señal de eco para la caracterización del blanco; Firma del blanco; Sección transversal del blanco.
PDF original: ES-2543790_T3.pdf
Fragmento de la descripción:
Dispositivo y procedimiento para determinar un rasgo de un vehículo La presente invención se refiere a un dispositivo y un procedimiento para determinar un rasgo característico de un vehículo que viaja por una vía. La invención se refiere además a una instalación con al menos dos de estos dispositivos.
La determinación de los rasgos característicos de los vehículos es importante para numerosas funciones en el control, la vigilancia y la facturación del tráfico. De esta manera, los vehículos individuales pueden detectarse y por ejemplo contarse o seguirse automáticamente, asignarse mediante los rasgos de ciertas clases de vehículos (por ejemplo, automóviles o camiones) y realizarse, controlarse y llevarse a cabo en peajes de carreteras o sistemas de tasas de aparcamiento que se forman en modelos de tarifa basados en clases o restricciones de circulación basadas en vehículos.
Para una determinación de los rasgos característicos se utilizan actualmente sobre todo sistemas ópticos, como barreras de luz, escáneres láser (por ejemplo US 2002/0140924 A1) o videocámaras. Por el documento EP 2 306 429 B1 se conoce por ejemplo un escáner láser operativo según un procedimiento de sección luminosa. Tales sistemas dependen de la buena visibilidad y por eso son muy sensibles a las condiciones climáticas; suelen fallar con lluvia, nieve o pulverizaciones de espuma de las olas. Las lentes de las barreras de luz, escáneres láser y videocámaras también requieren una limpieza frecuente para permanecer listas para funcionar.
En sectores como las instalaciones de monitorización de flujo de tráfico se utilizan actualmente sistemas de radar que, desde un punto elevado, por ejemplo un mástil de antena junto a una autopista, pueden detectar los movimientos del vehículo mediante un radar Doppler y seguirlos en una imagen de radar. No obstante, la precisión de medición de estos sistemas de radar es limitada, y la evaluación de las velocidades requiere un alto esfuerzo computacional para crear la imagen de flujo de tráfico. En el documento EP 0 636 900 A2 se utilizan haces de radar para medir la velocidad y la distancia, con el fin de crear con ello una silueta del punto de medición de distancia del vehículo.
La invención tiene el objetivo de proporcionar un dispositivo y un procedimiento para determinar un rasgo característico de un vehículo, que se estropea con menos frecuencia y necesita menos inspecciones que los sistemas ópticos conocidos y es más sencillo, más económico y más preciso que los sistemas de radar conocidos.
Este objetivo se consigue en un primer aspecto de la invención con un dispositivo del tipo anteriormente mencionado, 35 con:
un detector que está colocado sobre y/o en el lado de la vía y dirigido hacia la vía, que está configurado para medir el vector de movimiento del vehículo en una ubicación actual en un momento actual, una unidad de seguimiento conectada al detector para calcular una ubicación de destino del vehículo en un tiempo teórico sobre la base de la ubicación actual, el tiempo actual y el vector de movimiento, un primer sensor de radar unido al detector para transmitir un primer haz de radar dirigido hacia la ubicación actual, recibir un primer haz de radar reflejado y determinar un primer espectro de frecuencia del mismo, un segundo sensor de radar unido a la unidad de seguimiento para transmitir un segundo haz de radar, dirigido hacia la ubicación de destino en el tiempo teórico, recibir un segundo haz de radar reflejado y determinar un 45 segundo espectro de frecuencia del mismo, y una unidad de evaluación para generar el rasgo característico del vehículo de los espectros de frecuencia determinados, en el que los espectros de frecuencia forman el rasgo característico como una superficie sobre un plano frecuencia/tiempo.
La invención se basa en el conocimiento de los inventores, de que los espectros de frecuencia determinados reproducen rasgos del vehículo característicos. El vehículo y su estructura de superficie específica, como por ejemplo transiciones de superficies de carrocería a superficies acristaladas, espejos retrovisores, antenas, limpiaparabrisas, componentes de escape o equipos de refrigeración adjuntos, etc., reflejan respectivamente porcentajes de espectro específicos de los haces de radar emitidos y crean con ello un curso peculiar de los espectros de frecuencia como un 55 rasgo característico del vehículo. En estos cambios del primer al segundo espectro de frecuencia determinado se representa un componente adicional del rasgo característico de vehículo. No es necesaria una interpretación de cada espectro de frecuencia. La denominada superficie forma en cierto modo una «huella digital» del vehículo y puede almacenarse, compararse e incluso evaluarse ópticamente de manera sencilla (sin otra interpretación de los porcentajes de espectro de los espectros de frecuencia) . Esto reduce considerablemente el esfuerzo de evaluación en comparación con el estado conocido de la técnica. Los sensores de radar también son, en comparación con los sensores ópticos, menos propensos a pérdidas de visibilidad que surgen en el tráfico rodado, así como a la suciedad.
Resulta ventajoso si puede controlarse el haz de radar del segundo sensor de radar. De esta manera, el segundo sensor de radar puede adaptarse fácilmente a diferentes requisitos del vehículo, por su aplicación o con respecto a la 65 velocidad del vehículo (opcionalmente también el carril seleccionado) ; los haces de radar sucesivos también pueden emitirse en diferentes direcciones.
La controlabilidad direccional del segundo sensor de radar puede conseguirse, por ejemplo, por al menos dos antenas de radar secuencialmente controlables con distinta dirección de emisión; alternativa o adicionalmente también podría utilizarse una antena de radar mecánicamente giratoria. De manera especialmente preferente, el segundo sensor de radar tiene una antena de radar con característica direccional controlable en forma de un sistema de antenas controlado por fases. Con ello no son necesarios ningunas partes móviles mecánicas ni tampoco ninguna conmutación de una antena de radar a otra; de acuerdo con la invención, con ello se reduce adicionalmente la tasa de error y aumenta la disponibilidad del dispositivo.
Resulta ventajoso si la unidad de seguimiento está configurada para calcular al menos otro par de ubicación de destino/tiempo teórico, el segundo sensor de radar está configurado para determinar al menos otro espectro de frecuencia de la manera anteriormente mencionada, y la unidad de evaluación está configurada para generar el rasgo característico de todos los espectros de frecuencia determinados. Estos otros espectros de frecuencia, que se determinan en un vehículo que pasa, permiten dejar aún más claro el rasgo característico del vehículo al integrar los cambios de los espectros de frecuencia en varios pasos.
En una forma de realización preferente de la invención, el primer y el segundo sensor de radar están formados por un sensor de radar común cuya dirección puede controlarse, por el cual se ahorra un sensor de radar. En una forma de realización especialmente preferente de la invención, el detector puede además estar formado por un primer sensor de radar, que mide preferentemente mediante una evaluación Doppler el haz de radar reflejado del vector de movimiento con respecto a su velocidad en la dirección de marcha de la vía. Con ello no es necesario ningún otro sensor para la detección de la ubicación actual y el momento actual del vehículo; para la detección es suficiente en esta forma de realización la identificación de un vehículo mediante una evaluación del primer haz de radar reflejado, por ejemplo en el espectro de frecuencia. Si no se detecta ningún vehículo, el primer sensor de radar puede, de esta manera, por ejemplo en intervalos de tiempo regulares, emitir un primer haz de radar dirigido a la ubicación actual hasta que se detecte un vehículo.
Resulta especialmente ventajoso si el vector de movimiento se determina en su dirección por la dirección de marcha de la vía, dado que en este caso ya se determina un haz de radar reflejado del vector de movimiento mediante una evaluación Doppler determinada de la velocidad del vehículo.
En una forma de realización especialmente ventajosa de la invención, el dispositivo comprende además una base de datos para grabar los rasgos de referencia característicos de los vehículos de referencia de una clase de vehículo conocida, en el que la unidad de evaluación está configurada además para comparar el rasgo característico generado con los rasgos de referencia y, en caso de coincidencia, emitir la clase de vehículo del vehículo de referencia encontrado.... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para determinar un rasgo característico (M) de un vehículo (2) que viaja por una vía (5) , con:
un detector (8) , que está colocado sobre y/o al lado de la vía (5) , dirigido hacia la vía (5) , y configurado para medir el vector de movimiento (3) del vehículo (2) en una ubicación actual (P1) en un momento actual (t1) , una unidad de seguimiento (11) , conectada al detector (8) , para calcular una ubicación de destino (P2) del vehículo (2) en un tiempo teórico (t2) basado en la ubicación actual (P1) , el tiempo actual (t1) y el vector de movimiento (3) , un primer sensor de radar (6) , unido al detector (8) , para transmitir un primer haz de radar (7) dirigido hacia la ubicación actual (P1) , recibir un primer haz de radar reflejado (9) y determinar un primer espectro de frecuencia (F1) del mismo, un segundo sensor de radar (12) , unido a la unidad de seguimiento (11) , para transmitir un segundo haz de radar (13) , dirigido hacia la ubicación de destino (P2) en el tiempo teórico (t2) , recibir un segundo haz de radar reflejado (14) y determinar un segundo espectro de frecuencia (F2) del mismo, y una unidad de evaluación (19) para generar el rasgo característico (M) del vehículo (2) a partir de los espectros de frecuencia determinados (F1, F2) , caracterizado por que los espectros de frecuencia (Fj) forman el rasgo característico (M) como una superficie (26) sobre un plano frecuencia/tiempo.
2. Dispositivo según la reivindicación 1, caracterizado por que puede controlarse la dirección del haz de radar (13) del 20 segundo sensor de radar (12) .
3. Dispositivo según la reivindicación 2, caracterizado por que el segundo sensor de radar (12) tiene una antena de radar (16) con característica direccional controlable en forma de un sistema de antenas controlado por fases.
4. Dispositivo según las reivindicaciones 2 o 3, caracterizado por que la unidad de seguimiento (11) está configurada para calcular al menos otro par de ubicación de destino/tiempo teórico (Pi ti) , por que el segundo sensor de radar (12) está, para este propósito, configurado para determinar al menos otro espectro de frecuencia (Fi) de la manera anteriormente mencionada, y por que la unidad de evaluación (19) está configurada para generar el rasgo característico (M) de todos los espectros de frecuencia determinados (Fj) .
5. Dispositivo según una de las reivindicaciones 2 a 4, caracterizado por que el primer y el segundo sensores de radar (6, 12) están formados por un sensor de radar (12) común cuya dirección puede controlarse.
6. Dispositivo según una de las reivindicaciones 1 a 5, caracterizado por que el detector (8) está formado por el
primer sensor de radar (6) , que mide la velocidad (v) del vector de movimiento (3) en la dirección de marcha (4) de la vía (5) , preferentemente mediante una evaluación Doppler del haz de radar reflejado (9) .
7. Dispositivo según una de las reivindicaciones 1 a 6, además con:
una base de datos (27) para grabar los rasgos de referencia característicos (MRef) de los vehículos de referencia de una clase de vehículo conocida (C) , en el que la unidad de evaluación (19) está configurada además para comparar el rasgo característico generado (M) con los rasgos de referencia (MRef) y, en caso de coincidencia, emitir la clase de vehículo (C) del vehículo de referencia encontrado.
la transmisión de un primer haz de radar (7) dirigido hacia la ubicación actual (P1) en un tiempo actual (t1) , la recepción de un primer haz de radar reflejado (9) y la determinación de un primer espectro de frecuencia (F1) del 55 mismo, con medición simultánea, previa o posterior del vector de movimiento (3) del vehículo (2) en una ubicación actual (P1) mediante un detector (8) colocado sobre y/o al lado de la vía (5) y el cálculo de una ubicación de destino (P2) del vehículo (2) en un tiempo teórico (t2) basado en la ubicación actual (P1) , el tiempo actual (t1) y el vector de movimiento (3) , la transmisión de un segundo haz de radar (13) , dirigido hacia la ubicación de destino (P2) en el tiempo teórico (t2) , 60 la recepción de un segundo haz de radar reflejado (14) y la determinación de un segundo espectro de frecuencia (F2) del mismo, y la generación de un rasgo característico (M) del vehículo (2) a partir de los espectros de frecuencia determinados (F1, F2) , caracterizado por que los espectros de frecuencia (Fj) forman el rasgo característico (M) como una superficie (26) sobre un plano frecuencia/tiempo. 10. Procedimiento según la reivindicación 9, caracterizado por que se calcula al menos otro par de ubicación de destino/tiempo teórico (Pi ti) y para este propósito se determina al menos otro espectro de frecuencia (Fi) de la manera anteriormente mencionada, en la que el rasgo característico (M) se genera a partir de todos los espectros de frecuencia determinados (Fj) . 11. Procedimiento según la reivindicación 10, caracterizado por que, para calcular cada par de ubicación de destino/tiempo teórico (Pi ti) , se mide respectivamente otro vector de movimiento (3) . 12. Procedimiento según una de las reivindicaciones 9 a 11, caracterizado por que la velocidad (v) del vector de movimiento (3) se mide en la dirección de marcha (4) de la vía (5) mediante una evaluación Doppler del haz de radar reflejado (14, 14) . 13. Procedimiento según una de las reivindicaciones 9 a 12, caracterizado por que el par de ubicación actual/tiempo teórico (P1, t1) se determina mediante la detección del momento actual (t1) de una parte (10, 20, 21, 22, 23, 24, 25) del vehículo (2) en una ubicación actual (P1) predefinida, en el que la parte del vehículo (10, 20, 21, 22, 23, 24, 25) se detecta por comparación del espectro de frecuencia (F1) del primer haz de radar reflejado (9) con un espectro de frecuencia de referencia determinado en una vía vacía (5) . 14. Procedimiento según una de las reivindicaciones 9 a 13, además de para la clasificación de un vehículo (2) , caracterizado por que el rasgo característico (M) generado se compara con los rasgos de referencia (MRef) de los vehículos de referencia de la clase de vehículo conocida (C) y, en caso de coincidencia, se emite la clase de vehículo (C) del vehículo de referencia encontrado. 8. Instalación que comprende al menos dos dispositivos según una de las reivindicaciones 1 a 7, caracterizado por que los dispositivos (1a, 1b, 1c, 1d) están instalados a una distancia unos de otros sobre un puente (30) que cruza la vía (5) , en donde preferentemente al menos dos de los dispositivos (1a, 1b, 1c, 1d) están dirigidos hacia diferentes carriles (31a, 31b) .
9. Procedimiento para determinar un rasgo característico (M) de un vehículo (2) que viaja por una vía (5) , que comprende:
Patentes similares o relacionadas:
Método para la clasificación automática de objetos de radar, del 27 de Mayo de 2020, de HENSOLDT Sensors GmbH: Método para clasificar objetos de radar, en donde - una señal recibida se procesa en un canal de entrada dentro de una pluralidad de intervalos de integración coherentes sucesivos […]
Detección de barcos en datos de radar de interferometría, del 15 de Enero de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para averiguar una posición y una dirección de navegación en cada caso para uno o varios vehículos acuáticos que navegan en el agua a partir de datos de interferometría […]
 Procedimiento de clasificación de vehículos en movimiento, del 30 de Octubre de 2019, de JENOPTIK ROBOT GMBH: Procedimiento de clasificación de vehículos , en el que se acotan vehículos al pasar por un cono de radar formado por una radiación […]
Procedimiento de clasificación de vehículos en movimiento, del 30 de Octubre de 2019, de JENOPTIK ROBOT GMBH: Procedimiento de clasificación de vehículos , en el que se acotan vehículos al pasar por un cono de radar formado por una radiación […]
Sistema y método de obtención de imágenes, del 19 de Junio de 2019, de TELEDYNE AUSTRALIA PTY LTD: Un sistema de obtención de imágenes de radar para capturar una imagen de un objeto dentro de un área de interés a través de al menos un impedimento visual, dicho sistema […]
Clasificación de perfiles de rango, del 13 de Junio de 2019, de BAE SYSTEMS PLC: Un método para clasificar un perfil de rango dado, que comprende: (i) recibir el perfil de rango dado que ha de ser clasificado; (ii) agrupar fuentes de información que […]
Método y sistema para medir el contenido energético del gas, del 22 de Mayo de 2019, de SP Technical Research Institute Of Sweden: Un método para medir el contenido energético de un gas, que comprende: medir la velocidad del sonido en el gas; medir la permitividad relativa […]
Búsqueda e identificación electromagnética en zonas de campo cercano, del 8 de Mayo de 2019, de Levitection Ltd: Un procedimiento de detección, que comprende las etapas de: (a) transmitir secuencialmente una señal de cada uno de una pluralidad de transmisores (TE); (b) recibir, […]
Operación de radar con capacidad Doppler aumentada, del 20 de Febrero de 2019, de Lee, Robert W: Método para utilizar reflexiones de energía de ondas de uno o de varios objetos reflejantes para caracterizar ciertas propiedades de estos […]