Dispositivo y procedimiento de control para un amortiguador.
Dispositivo de control de la fuerza de amortiguación (1) para controlar una fuerza de amortiguación generada porun amortiguador (Dn) interpuesto entre un elemento suspendido (Bn) y un elemento no suspendido (Wn) de unvehículo (A),
que comprende:
un mecanismo de variación de la fuerza de amortiguación (3) que complementa una fuerza de amortiguación mínima(Fdn) que puede ser generada por el amortiguador (Dn) con una fuerza de amortiguación variable (Fcn); yuna parte de control (2) que funciona para:
calcular la fuerza de amortiguación mínima (Fdn) en base a la velocidad de carrera (Vsn) del amortiguador (Dn)(206);
calcular la desviación (εn) entre un valor objetivo de la fuerza de amortiguación (Fsn) y la fuerza de amortiguaciónmínima (Fdn) (S207); y
controlar en bucle abierto el mecanismo variación de la fuerza de amortiguación (3) de acuerdo con la desviación(εn) de manera que la fuerza de amortiguación generada por el amortiguador (Dn) coincida con el valor objetivo de lafuerza de amortiguación (Fsn) (S208-S212).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07012957.
Solicitante: KAYABA INDUSTRY CO., LTD..
Nacionalidad solicitante: Japón.
Dirección: WORLD TRADE CENTER BLDG., 4-1, HAMAMATSU-CHO 2-CHOME MINATO-KU, TOKYO 105-6190 JAPON.
Inventor/es: Masamura,Tatsuya.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60G17/018 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60G SUSPENSION DE VEHICULOS (vehículos de colchón de aire B60V; montajes entre el chasis y el cuerpo del vehículo B62D 24/00). › B60G 17/00 Suspensiones elásticas que permiten ajustar las características de los muelles o de los amortiguadores de vibraciones, regular la distancia entre la superficie portante y la parte suspendida del vehículo o bloquear la suspensión durante la utilización para adaptarse a las condiciones variables del vehículo o del terreno, p. ej. en función de la velocidad o de la carga. › caracterizadas por la utilización de un modo de tratamiento de la señal o de un método de control específicos.
- B60G17/06 B60G 17/00 […] › Características de los amortiguadores (B60G 17/015 tiene prioridad).
- F16F9/46 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16F RESORTES; AMORTIGUADORES; MEDIOS PARA AMORTIGUAR LAS VIBRACIONES. › F16F 9/00 Resortes, amortiguadores de vibraciones, amortiguadores de choques o amortiguadores de movimiento de estructura similar que utilizan un fluido o un medio equivalente como agente de amortiguamiento (F16F 5/00 tiene prioridad; uniones de válvulas a cuerpos elásticos inflables B60C 29/00; accesorios de maniobra para puertas que emplean un sistema de frenado por fluido E05F). › permitiendo el control a distancia.
- F16F9/53 F16F 9/00 […] › Medios para ajustar las características de los amortiguadores haciendo variar la viscosidad del fluido, p. ej. electromagnéticos.
PDF original: ES-2387468_T3.pdf
Fragmento de la descripción:
Dispositivo y procedimiento de control para un amortiguador
Campo de la invención
Esta invención se refiere al control de un amortiguador para un vehículo que tiene una característica de amortiguación no lineal.
Antecedentes de la invención
JPH06-247117A, publicada por la Oficina de Patentes Japonesa en 1994, describe la aplicación de control Sky Hook para el control de la fuerza de amortiguación de un amortiguador para un vehículo.
El dispositivo de control de acuerdo con esta técnica anterior calcula un coeficiente amortiguación C del amortiguador mediante una relación C = Cs · V/ Vs cuando el signo de la velocidad de un elemento suspendido V y una velocidad de carrera Vs del amortiguador es positivo. En cambio, el dispositivo de control calcula el coeficiente de amortiguación C del amortiguador mediante una relación C = Cs · V cuando el signo es negativo. Aquí Cs indica un coeficiente de amortiguación Sky Hook.
En el control Sky Hook, cuando el signo de la velocidad de los elementos suspendidos V y el de la velocidad de carrera Vs del amortiguador son idénticos, el control Sky Hook se calcula multiplicando la velocidad de los elementos suspendidos V por el coeficiente de amortiguación Sky Hook Cs. Por otro lado, cuando los signos son diferentes, el control debe realizarse para provocar que la fuerza de control Sky Hook se vuelva cero.
El dispositivo de la técnica anterior ajusta el valor del coeficiente de amortiguación C del amortiguador de manera que la fuerza de control Sky Hook Cs·V, que se requiere cuando los signos de la velocidad de los elementos suspendidos V y la velocidad de carrera Vs del amortiguador son idénticas, se vuelve igual a un valor Vs·C, que es una fuerza de amortiguación del amortiguador que se obtiene como producto de la velocidad de carrera Vs del amortiguador y el coeficiente de amortiguación C.
Descripción de la invención
Sin embargo, cuando se ajusta el coeficiente de amortiguación C de acuerdo con la técnica anterior, puede resultar imposible controlar la fuerza de amortiguación de un amortiguador tal como se pretende.
Haciendo referencia a la figura 10, cuando la característica de una fuerza de amortiguación generada respecto a una velocidad de carrera de un amortiguador (en lo sucesivo denominado característica de amortiguación del amortiguador) mantiene una característica lineal, la fuerza de amortiguación del amortiguador se controla de manera óptima mediante el ajuste del coeficiente de amortiguación C.
Haciendo referencia a la figura 11, en un amortiguador en el que la fuerza de amortiguación se regula mediante el ajuste de una presión de apertura de una válvula de amortiguación, o en un amortiguador en el cual la característica de amortiguación se desplaza en paralelo utilizando un fluido electrorreológico o un fluido magnetoreológico, la característica de amortiguación puede tener una característica no lineal. En un amortiguador que tiene esa característica de amortiguación, es difícil regular la fuerza de amortiguación simplemente alterando el coeficiente de amortiguación C obtenido mediante el procedimiento anterior. En otras palabras, cuando la línea indicativa de la característica de amortiguación es lineal y pasa por el origen donde se cruza el eje de la velocidad de carrera y el eje de la fuerza de amortiguación, puede provocarse que el amortiguador genere una fuerza de amortiguación preferible simplemente alterando el coeficiente de amortiguación C, pero en un amortiguador que presente una característica de amortiguación no lineal tal como se muestra en la figura 11, como que el gradiente de la línea característica de amortiguación varía a lo largo de su curso, puede resultar imposible hacer que el amortiguador genere una fuerza de amortiguación preferible simplemente alterando el coeficiente de amortiguación C.
Además, si la fuerza de amortiguación generada por el amortiguador variaba completamente en proporción a la velocidad de carrera del amortiguador, la regulación de la fuerza de amortiguación en función del ajuste del coeficiente de amortiguación C resultaría eficaz, pero es difícil realizar dicha característica de amortiguación en un amortiguador, y por lo tanto puede producirse una desviación entre la fuerza de amortiguación real y una fuerza de amortiguación calculada por el control Sky Hook, lo cual puede afectar negativamente al confort de marcha del vehículo.
Aún más, la técnica anterior divide la fuerza de control Sky Hook Cs · V por la velocidad de carrera Vs para calcular el coeficiente de amortiguación C. Cuando la velocidad de carrera Vs toma un valor de aproximadamente cero, el coeficiente de amortiguación C toma un valor muy grande y el error de cálculo aumenta inevitablemente.
En una zona del recorrido en la que la velocidad de carrera Vs es aproximadamente cero, es difícil controlar la fuerza de amortiguación con precisión, y por lo tanto no puede generarse una fuerza de amortiguación estable debido a un fenómeno conocido como “Hunting”.
Por lo tanto, un objetivo de esta invención es optimizar el control de la fuerza de amortiguación de un amortiguador que presenta una característica de amortiguación no lineal.
Con el fin de lograr el objetivo anterior, esta invención presenta un dispositivo de control de la fuerza de amortiguación para controlar la fuerza de amortiguación generada por un amortiguador interpuesto entre un elemento suspendido y un elemento no suspendido de un vehículo. El dispositivo comprende un mecanismo de variación de la fuerza de amortiguación que complementa una fuerza de amortiguación mínima que puede ser generada por el amortiguador con una fuerza de amortiguación variable, y una parte de control funciona para calcular la fuerza de amortiguación mínima en base a la velocidad de carrera del amortiguador para calcular una desviación entre un valor objetivo de la fuerza de amortiguación y la fuerza de amortiguación mínima; y controlar en bucle abierto el mecanismo de variación de la fuerza de amortiguación de acuerdo con la desviación de manera que la fuerza de amortiguación generada por el amortiguador coincida con el valor objetivo de la fuerza de amortiguación.
Esta invención también dispone un procedimiento de control de la fuerza de amortiguación para un amortiguador provisto del mecanismo de variación de la fuerza de amortiguación tal como se ha descrito anteriormente. El procedimiento comprende calcular la fuerza de amortiguación mínima en base a la velocidad de carrera del amortiguador, calcular una desviación entre un valor objetivo de la fuerza de amortiguación y la fuerza de amortiguación mínima, y controlar en bucle abierto el mecanismo de variación de la fuerza de amortiguación de acuerdo con la desviación de manera que la fuerza de amortiguación generada por el amortiguador coincida con el valor objetivo de la fuerza de amortiguación.
Los detalles así como otras características y ventajas de esta invención se exponen en el resto de la memoria y se muestran en los dibujos adjuntos.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
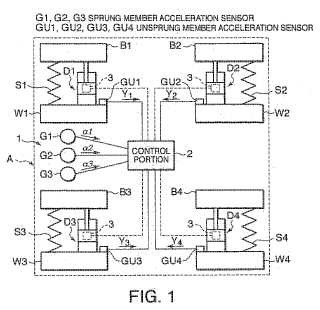
La figura 1 es un diagrama esquemático de un dispositivo de control para un amortiguador de acuerdo con esta invención.
La figura 2 es una vista en perspectiva esquemática de un vehículo que indica la ubicación de sensores de aceleración de los elementos suspendidos de acuerdo con esta invención.
La figura 3 es un diagrama que muestra una característica de amortiguación del amortiguador.
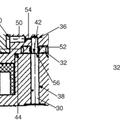
La figura 4 es una vista en sección longitudinal de un mecanismo de variación de la fuerza de amortiguación instalado en el amortiguador.
La figura 5 es una vista esquemática en sección longitudinal del amortiguador.
La figura 6 es una vista esquemática en sección longitudinal de otro amortiguador al cual puede aplicarse esta invención.
La figura 7 es un diagrama de bloques de una parte de control del dispositivo de control de acuerdo con esta invención.
La figura 8 es un diagrama que muestra una característica de un mapa de la fuerza de amortiguación mínima almacenado por la parte de control.
La figura 9 es un diagrama de flujo que describe una rutina de control de la fuerza de amortiguación ejecutada por la parte de control.
La figura 10 es un diagrama que... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de control de la fuerza de amortiguación (1) para controlar una fuerza de amortiguación generada por un amortiguador (Dn) interpuesto entre un elemento suspendido (Bn) y un elemento no suspendido (Wn) de un vehículo (A) , que comprende:
un mecanismo de variación de la fuerza de amortiguación (3) que complementa una fuerza de amortiguación mínima (Fdn) que puede ser generada por el amortiguador (Dn) con una fuerza de amortiguación variable (Fcn) ; y
una parte de control (2) que funciona para:
calcular la fuerza de amortiguación mínima (Fdn) en base a la velocidad de carrera (Vsn) del amortiguador (Dn) (206) ;
calcular la desviación (En) entre un valor objetivo de la fuerza de amortiguación (Fsn) y la fuerza de amortiguación mínima (Fdn) (S207) ; y
controlar en bucle abierto el mecanismo variación de la fuerza de amortiguación (3) de acuerdo con la desviación (En) de manera que la fuerza de amortiguación generada por el amortiguador (Dn) coincida con el valor objetivo de la fuerza de amortiguación (Fsn) (S208-S212) .
2. Dispositivo de control de la fuerza de amortiguación (1) según la reivindicación 1, caracterizado por el hecho de que la parte de control (2) funciona adicionalmente para calcular el valor objetivo de la fuerza de amortiguación (Fsn) multiplicando una velocidad de los elementos suspendidos (Vn) del elemento suspendido (Bn) en una dirección vertical por un coeficiente de amortiguación Sky Hook (Cs) (S205) .
3. Dispositivo de control de fuerza de amortiguación (1) según la reivindicación 2, caracterizado por el hecho de que la parte de control (2) funciona adicionalmente para calcular la fuerza de amortiguación mínima (Fdn) haciendo referencia a un mapa predefinido que define la fuerza de amortiguación mínima (Fdn) utilizando la velocidad de carrera (Vsn) del amortiguador (Dn) como parámetro.
4. Dispositivo de control de fuerza de amortiguación (1) según cualquiera de las reivindicaciones 1 a 3, caracterizado por el hecho de que la parte de control (2) funciona adicionalmente para calcular un producto de la desviación (En) y la velocidad de carrera (Vsn) del amortiguador (Dn) (S208) , y establecer que la fuerza de amortiguación variable (Fcn) sea igual a la desviación (En) cuando el signo del producto sea positivo mientras se establece que la fuerza de amortiguación variable (Fcn) sea cero cuando el signo del producto sea negativo (S208-S211) .
5. Dispositivo de control de fuerza de amortiguación (1) según cualquiera de las reivindicaciones 1 a 4, caracterizado por el hecho de que el mecanismo de variación de la fuerza de amortiguación (3) comprende una válvula de amortiguación (108, 115, 116) y un solenoide (112) que varía una presión de apertura de la válvula de amortiguación (108, 115, 116) de acuerdo con una corriente eléctrica suministrada, y la parte de control (2) funciona adicionalmente para controlar en bucle abierto la corriente eléctrica suministrada al solenoide (112) de acuerdo con la desviación (En) (S208-S212) .
6. Dispositivo de control de fuerza de amortiguación (1) según cualquiera de las reivindicaciones 1 a 4, caracterizado por el hecho de que el amortiguador (Dn) está configurado para generar la fuerza de amortiguación en función de una viscosidad de un fluido magnetoreológico encerrado en el mismo, el mecanismo de variación de la fuerza de amortiguación (3) comprende un mecanismo de variación de la viscosidad (201) que varía la viscosidad del fluido magnetoreológico en el amortiguador (Dn) de acuerdo con una corriente eléctrica suministrada, y la parte de control
(2) funciona adicionalmente para controlar en bucle abierto la corriente eléctrica suministrada al mecanismo de viscosidad variable (201) de acuerdo con la desviación (En) .
7. Dispositivo de control de fuerza de amortiguación (1) según cualquiera de las reivindicaciones 1 a 4, caracterizado por el hecho de que el amortiguador (Dn) está configurado para generar la fuerza de amortiguación en función de la viscosidad de un fluido electrorreológico encerrado en el mismo, el mecanismo de variación de la fuerza de amortiguación (3) comprende un mecanismo de viscosidad variable (201) que varía la viscosidad del fluido electrorreológico en el amortiguador (Dn) de acuerdo con una corriente eléctrica suministrada, y la parte de control
(2) funciona adicionalmente para controlar en bucle abierto la corriente eléctrica suministrada al mecanismo de viscosidad variable (201) de acuerdo con la desviación (En) .
8. Dispositivo de control de fuerza de amortiguación (1) según cualquiera de las reivindicaciones 1 a 7, caracterizado por el hecho de que el mecanismo de variación de la fuerza de amortiguación (3) está configurado para tener una función para variar continuamente la fuerza de amortiguación generada por el amortiguador (Dn) .
9. Dispositivo de control de fuerza de amortiguación (1) según cualquiera de las reivindicaciones 1 a 8, caracterizado por el hecho de que la parte de control (2) funciona adicionalmente para controlar en bucle abierto el mecanismo de variación de la fuerza de amortiguación (3) de acuerdo con la desviación (En) de manera que una característica de la fuerza de amortiguación del amortiguador (Dn) , que está representada por una relación entre una velocidad de carrera y una fuerza de amortiguación generada del amortiguador (Dn) realiza un desplazamiento paralelo a lo largo de un eje de la fuerza de amortiguación generada (S206-S209) .
10. Dispositivo de control de fuerza de amortiguación (1) según la reivindicación 9, caracterizado por el hecho de que la característica de la fuerza de amortiguación es una característica no lineal tal que la fuerza de amortiguación varía de manera más pronunciada en una zona en la que velocidad de carrera (Vsn) es menor que una velocidad predeterminada que en una zona en la que la velocidad de carrera (Vsn) es mayor que la velocidad predeterminada, independientemente de la dirección de la carrera del amortiguador (Dn) .
11.Procedimiento de control de una fuerza de amortiguación (1) para controlar una fuerza de amortiguación generada por un amortiguador (Dn) interpuesto entre un elemento suspendido (Bn) y un elemento no suspendido (Wn) de un vehículo (A) , comprendiendo el amortiguador (Dn) un mecanismo de variación de la fuerza de amortiguación (3) que complementa una fuerza de amortiguación mínima (Fdn) que puede ser generada por el amortiguador (Dn) con una fuerza de amortiguación variable (Fcn) , comprendiendo el procedimiento:
calcular la fuerza de amortiguación mínima (Fdn) en base a la velocidad de carrera (Vsn) del amortiguador (Dn) (206) ;
calcular una desviación (En) entre el valor objetivo de la fuerza de amortiguación (Fsn) y la fuerza de amortiguación mínima (Fdn) (S207) , y
controlar en bucle abierto el mecanismo de variación de la fuerza de amortiguación (3) de acuerdo con la desviación (En) de manera que la fuerza de amortiguación generada por el amortiguador (Dn) coincida con el valor objetivo de la fuerza de amortiguación (Fsn) (S208-S212) .
Patentes similares o relacionadas:
 Sistema de graduación de amortiguación con anillo de obturación perpendicular, del 29 de Abril de 2020, de Kendrion (Villingen) GmbH: Sistema de graduación de amortiguación , que presenta
- un tubo de guía dispuesto en una carcasa exterior con una pared exterior lateral , cuyo espacio […]
Sistema de graduación de amortiguación con anillo de obturación perpendicular, del 29 de Abril de 2020, de Kendrion (Villingen) GmbH: Sistema de graduación de amortiguación , que presenta
- un tubo de guía dispuesto en una carcasa exterior con una pared exterior lateral , cuyo espacio […]
Electroválvula, del 30 de Octubre de 2019, de KYB Corporation: Electroválvula (V), que comprende: una válvula principal (M) que tiene un asiento de válvula dispuesto en un conducto de flujo principal , […]
Electroválvula, del 16 de Octubre de 2019, de KYB Corporation: Electroválvula (V2) que comprende: un asiento de válvula dispuesto en un conducto de flujo principal ; un cuerpo de válvula principal […]
SISTEMA DE AMORTIGUACIÓN AJUSTABLE PARA VEHÍCULOS, del 11 de Octubre de 2019, de TEJERO DAMAS, Victor Manuel: 1. Sistema de amortiguación ajustable para vehículos caracterizado porque está configurado a partir de un amortiguador ajustable formado por un resorte , de tal manera […]
Válvula de amortiguación, del 21 de Agosto de 2019, de KYB Corporation: Válvula de amortiguación (V1, V2, V3) que comprende: un elemento de asiento de válvula que tiene un puerto (1a) y un primer asiento […]
Válvula de amortiguación, del 21 de Agosto de 2019, de KYB Corporation: Válvula de amortiguación (V) que comprende: un elemento de asiento de válvula provisto de un puerto (1a); un cuerpo de válvula que abre o cierra el puerto […]
Válvula electromagnética para el control del flujo de un medio a presión, del 7 de Agosto de 2019, de Kendrion (Villingen) GmbH: Válvula electromagnética para el control del flujo de un medio a presión, que comprende - una carcasa de válvula con una abertura de alimentación […]
Amortiguador hidráulico de vibraciones, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Amortiguador hidráulico de vibraciones que comprende: un recipiente , un tubo interior , que está dispuesto en el recipiente , un […]