DISPOSITIVO PARA MANIPULAR PRODUCTOS.
Un dispositivo (1) para manipular productos (2), que comprende un travesaño de soporte (5) que se extiende sustancialmente en horizontal sobre un área de manipulación de productos;
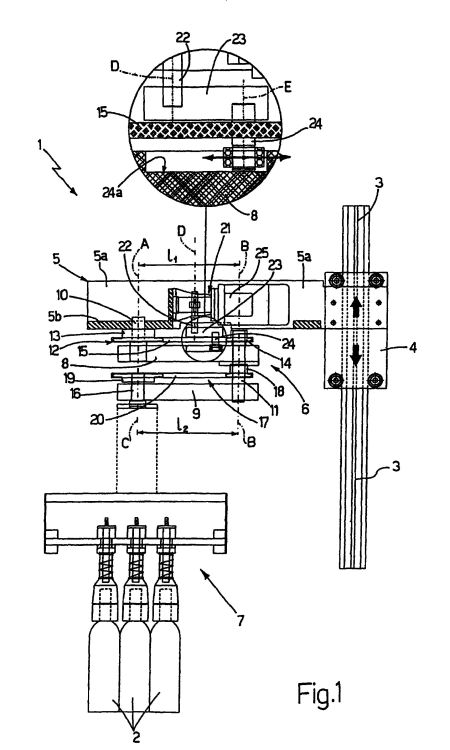
un brazo pantógrafo articulado (6) sujeto a dicho travesaño de soporte (5) para abrirse en tijera en un plano sustancialmente horizontal que se extiende sobre el área de manipulación de productos y un elemento de agarre móvil (7), que está sujeto al extremo libre del brazo articulado (6) a fin de estar orientado hacia abajo del área de manipulación de productos y que está diseñado para agarrar y retener selectivamente al menos uno de dichos productos (2); comprendiendo dicho brazo pantógrafo articulado (6) un medio brazo superior (8) montado en el travesaño de soporte (5) para que rote, respecto al travesaño de soporte, alrededor de un primer eje sustancialmente vertical (A); un medio brazo inferior (9) montado en dicho medio brazo superior (8) para que rote libremente, respecto al medio brazo superior, alrededor de un segundo eje (B) paralelo a dicho primer eje (A) y un primer engranaje en cascada (12) para transmitir la rotación del medio brazo superior (8), alrededor del primer eje (A), al medio brazo inferior (9), de manera que el medio brazo inferior (9) rota, respecto al medio brazo superior (8) y alrededor del segundo eje (B), en la dirección opuesta y a una velocidad que representa dos veces la velocidad angular de la rotación del medio brazo superior (8) alrededor de dicho primer eje (A), a fin de coordinar la apertura en tijera de dicho primer medio brazo superior (8) y dicho medio brazo inferior (9); comprendiendo, asimismo, dicho dispositivo (1) un medio de accionamiento (21) que, previa orden, hace rotar el medio brazo superior (8) alrededor de dicho primer eje (A), a fin de abrir en tijera dicho brazo pantógrafo articulado (6) y mover, así, dicho elemento de agarre móvil (7); y caracterizado porque el medio de accionamiento (21) comprende un árbol motor (22), que se extiende coaxialmente con un tercer eje (D) paralelo a dicho primer eje (A) y separado de éste y que está montado, de manera que puede rotar, en dicho travesaño de soporte (5), con un extremo axial del árbol motor orientado hacia dicho medio brazo superior (8); un cigüeñal (23) montado firmemente en el extremo axial de dicho árbol motor (22) y proyectándose desde el árbol motor (22) en una dirección sustancialmente perpendicular a dicho tercer eje (D); un pasador de rodillo de leva (24) proyectándose desde el extremo distal de dicho cigüeñal (23), coaxialmente con un cuarto eje (E) paralelo a dicho tercer eje (D) y separado de éste, a fin de deslizarse dentro de una ranura longitudinal (24a) formada en el cuerpo de dicho medio brazo superior (8) y una unidad motora (25) conectada mecánicamente a dicho árbol motor (22) para hacerlo rotar, previa orden, en el sentido de las agujas del reloj o en sentido contrario, alrededor de dicho tercer eje (D) y así hacer rotar el cigüeñal (23) alrededor de dicho tercer eje (D).
Tipo: Resumen de patente/invención.
Solicitante: OMA S.R.L..
Nacionalidad solicitante: Italia.
Dirección: VIALE DEL LAVORO,17,37069 VILLAFRANCA DI VERONA.
Inventor/es: BALDI, GIAMPIETRO.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Diciembre de 2006.
Fecha Concesión Europea: 13 de Agosto de 2008.
Clasificación PCT:
- B21D43/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21D TRABAJO MECANICO O TRATAMIENTO DE CHAPAS, TUBOS, BARRAS O PERFILES METALICOS SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DE METALES POR PUNZONADO (trabajo mecánico o tratamiento de alambre B21F). › B21D 43/00 Dispositivos de alimentación, de alineamiento o de almacenado combinados con aparatos para trabajar o tratar la chapa, tubos o perfiles, dispuestos en estos aparatos o especialmente adaptados para ser utilizados en asociación con estos aparatos; Asociación de dispositivos de corte con estos aparatos (dispositivos de corte asociados a las herramientas, ver los grupos previstos para estas herramientas). › por medio de tenazas o pinzas.
- B65G47/90 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
- B65G47/91 B65G 47/00 […] › que tienen pinzas neumáticas, p. ej. aspirantes.
- B65G59/02 B65G […] › B65G 59/00 Desapilado de objetos (B65G 60/00 tiene prioridad). › Desapilado por lo alto de la pila.
- B65G61/00 B65G […] › Utilización de aparatos de toma o de transferencia, o de manipuladores, para apilar o desapilar objetos no previstos en otro lugar.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
Dispositivo y procedimiento para desembalar y alimentar envueltas de envase plegadas de manera plana y verticales, del 10 de Junio de 2020, de SIG TECHNOLOGY AG: Dispositivo para transferir envolturas de envase plegadas de manera plana y verticales a una unidad de procesamiento subsiguiente, en particular una máquina llenadora para […]
Ventosa de aspiración y procedimiento para asir rodajas elásticas, del 27 de Mayo de 2020, de DEUTSCHES INSTITUT FUR LEBENSMITTELTECHNIK E.V.: Ventosa de aspiración para el uso como dispositivo de separación de rodajas elásticas de una pila de rodajas, con una campana de aspiración […]
Estación automática para recoger artículos y procedimientos relacionados para usar, del 26 de Febrero de 2020, de CT PACK S.R.L.: Una estación automática para recoger artículos (A) que comprende: - un sistema de movimiento que comprende un transportador que define una superficie […]
Dispositivo para recoger artículos, del 15 de Enero de 2020, de CT PACK S.R.L.: Un dispositivo para recoger artículos , que comprende una unidad de soporte y una pluralidad de cabezales de agarre portados mediante la unidad de soporte , […]
Silenciador para pinza de succión, del 25 de Diciembre de 2019, de DEUTSCHES INSTITUT FUR LEBENSMITTELTECHNIK E.V.: Silenciador con una carcasa dotada de una entrada que puede unirse con el conducto de gas de escape de una pinza de succión y con […]
Ventosa con faldón separable, del 4 de Diciembre de 2019, de VTEC Co. Ltd: Ventosa con faldón separable que comprende: un cuerpo hueco (11, 31, 41 o 51) que tiene un conducto formado verticalmente a través de él, una protuberancia anular […]
Dispositivo de ventosas y transportador por aspiración con un dispositivo de ventosas de este tipo, del 9 de Octubre de 2019, de Putz, Stefan: Dispositivo de ventosas para un transportador por aspiración que comprende una ventosa para recoger un producto, en donde la ventosa define una cámara de aspiración […]
Dispositivo de transporte de piezas y método para transportar piezas, del 17 de Abril de 2019, de FAGOR ARRASATE, S. COOP: Dispositivo de transporte de piezas, en particular de piezas en forma de placa, que comprende un medio transportador para transportar […]