DISPOSITIVO PARA LA MANIPULACION O TRANSFORMACION DE ELEMENTOS O SUBCONJUNTOS INDUSTRIALES.
1. Dispositivo para la manipulación o transformación de elementos o subconjuntos industriales,
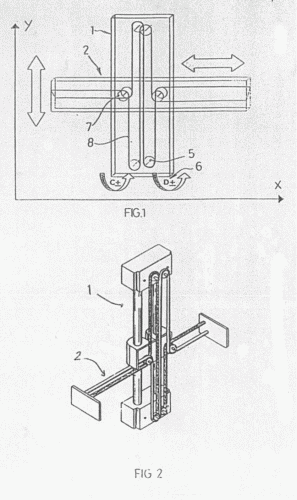
de forma automática, caracterizado esencialmente por el hecho de consistir en un mecanismo que permite el desplazamiento de un sistema de estructura dispuesto en el sentido de los ejes cartesianos (XY), accionados mediante dos elementos motores, controlados de forma automática mediante un conjunto electrónico, y acoplados a una única transmisión de poleas, dispuesto todo ello de manera que la estructura correspondiente al eje horizontal de las abscisas (X) se desplazará tanto en sentido horizontal como en sentido vertical, mientras la otra estructura, la correspondiente al eje de las ordenadas (Y) es fija, estando la estructura horizontal ensamblada transversalmente sobre la vertical, mediante un núcleo estructural deslizante, en el que están dispuestas las guías de deslizamiento de ambas estructuras, permitiendo que el extremo de la estructura horizontal desplazable, sobre la que se podrá acoplar el útil adecuado y necesario para la función del dispositivo, alcance todos y cada uno de la totalidad de los puntos del plano determinado por ambas estructuras, en su referencia cartesiana.
2. Dispositivo para la manipulación o transformación de elementos o subconjuntos industriales, de forma automática, según la anterior reivindicación, caracterizado por el hecho de que la transmisión que permite el desplazamiento de la estructura horizontal, del tipo correa, fleje, cable o similar, según convenga, transmite el movimiento desde los elementos de accionamiento hasta el conjunto de poleas móviles y fijas, ubicadas en la zona del núcleo estructural deslizante, así como en las zonas extremas de las estructuras del conjunto, manteniendo la rigidez de la estructura geométrica resultante, en función de su propia tensión, y caracterizado además porque los elementos motrices de accionamiento de la transmisión están solidarizados con la estructura fija vertical y no se desplazan con la estructura horizontal.
3. Dispositivo para la manipulación o transformación de elementos o subconjuntos industriales, de forma automática, según la 1ª reivindicación, caracterizado por el hecho de que la estructura vertical fija podrá estar instalada sobre una base giratoria, con lo cual el conjunto dispondrá de la posibilidad práctica de acceso a cualquier punto de los planos verticales dispuestos alrededor de los 360°.
4. Dispositivo para la manipulación o transformación de elementos o subconjuntos industriales, de forma automática, según la reivindicación 1ª, caracterizado por el hecho de que las estructuras vertical y horizontal están constituidas por sendas caras laterales, estando provistas, las de la estructura vertical, en sus caras interiores, de dos guías verticales y paralelas, de sección cilíndrica o trapezoidal, según convenga, donde se introducirán unos patines de idéntica sección que posee el núcleo deslizante en el exterior de sus caras verticales, mientras que en las placas de la estructura horizontal desplazable las guías están situadas en su cara exterior, disponiendo, tanto las caras de la estructura vertical como las de la estructura horizontal, de regruesamientos de sección cuadrangular aptas para albergar la oquedad que conforma las guías de deslizamiento.
5. Dispositivo para la manipulación o transformación de elementos o subconjuntos industriales, de forma automática, según la reivindicación 4ª, caracterizado por el hecho de que las placas paralelas que constituyen la estructura vertical quedan solidarizadas, por su parte inferior, por la placa base, mientras que por su parte superior por la cúpula prismática allí situada, quedando solidarizadas las placas que forman la estructura horizontal mediante la placa extrema, sobre la que podrán acoplarse los útiles requeridos por el dispositivo para llevar a cabo su función, y la placa posterior, dispuesta al efecto.
Tipo: Resumen de patente/invención.
Solicitante: SANCHEZ SOLER,JOSE MIGUEL
ABAD MARTIN-CAMUAS,MIGUEL ANGEL
PAYA VICENS,ARTEMIO.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: SANCHEZ SOLER,JOSE MIGUEL, ABAD MARTIN-CAMUAS,MIGUEL ANGEL, PAYA VICENS,ARTEMIO.
Fecha de Solicitud: 16 de Mayo de 2003.
Fecha de Publicación: .
Fecha de Concesión: 9 de Diciembre de 2003.
Clasificación Internacional de Patentes:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G05B19/08 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › que utilizan tableros de conexión, de distribuidores de barras cruzadas, de conmutadores de matriz, o análogos.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones, del 22 de Abril de 2020, de GUDEL GROUP AG: Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
CONTROLADOR PARA ROBOTS, del 19 de Marzo de 2020, de ERLE ROBOTICS, S.L: En este documento se describe detalladamente y con la inclusión de un ejemplo de implementación de la correspondiente invención, así como de las correspondientes figuras […]