DISPOSITIVO PARA DETECTAR UN OBJETO MÓVIL.
Dispositivo para un vehículo de motor con al menos un sensor de ultrasonidos (2,
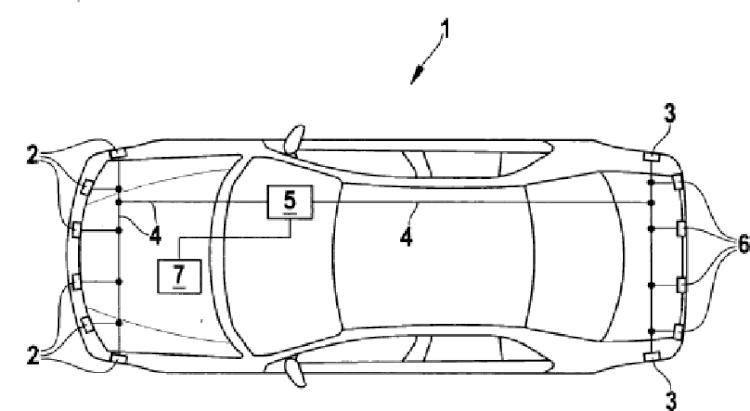
3) para detectar un objeto móvil, en especial un vehículo que se aproxima, y con una unidad de control (5) para determinar la distancia y/o la velocidad relativa del objeto como valor de medición, por un lado, y las condiciones ambientales importantes con relación a la detección de valores de medición, por otro lado, en donde condiciones ambientales importantes son aquellas que se refieren a las condiciones de visibilidad, al estado de la carretera, a la temperatura, a la humedad o a la lluvia, así como con una unidad de distribución (7) para la activación de una señal en caso necesario a causa de los valores de medición así establecidos, caracterizado por al menos un sensor de ultrasonidos adicional (6) para determinar las condiciones ambientales, al mismo tiempo que la determinación de la distancia o de la velocidad relativa del objeto móvil mediante el otro sensor de ultrasonidos (2, 3)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/056474.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: LEE,WEI-CHIA.
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Junio de 2007.
Clasificación Internacional de Patentes:
- G01S15/87 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › Combinaciones de sistemas de sonar.
- G01S15/93C
Clasificación PCT:
- B60K31/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › Accesorios actuantes únicamente sobre una sola subunidad, para el control automático de la velocidad, p.ej. prevenir que la velocidad sobrepase un valor determinado o mantener una velocidad particular, seleccionada por el conductor del vehículo (accesorios actuantes sobre dos o más subunidades B60W 30/14; control del conjunto de propulsión en sí ver las clases o subclases apropiadas, p. ej. F02D; indicadores de velocidad G01P; sistemas o dispositivos para controlar la velocidad en general G05D 13/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2358155_T3.pdf
Fragmento de la descripción:
Estado de la técnica
La invención se refiere a un dispositivo con al menos un sensor de ultrasonidos para detectar un objeto móvil, en especial un vehículo que se aproxima, y con una unidad de control para determinar la distancia y/o la velocidad relativa del objeto como valor de medición, por un lado, y las condiciones ambientales importantes con relación a la detección de valores de medición, por otro lado, así como con una unidad de distribución para la activación de una señal en caso necesario a causa de los valores de medición así establecidos.
Un dispositivo del género expuesto, determinado para vehículos de motor se conoce en la práctica bajo la denominación “asistente de cambio de carril”. El asistente de cambio de carril es un dispositivo para determinar un valor de peligro con base en datos de localización, en especial la distancia y la velocidad relativa de los vehículos afectados por el cambio de carril.
Los procesos de cambio de carril suponen un elevado riesgo de accidente, en especial en autopistas y autovías con varios carriles. El motivo estriba casi siempre en que el conductor de un vehículo, en un cambio de carril, no ve a otros participantes en el tráfico que se acercan desde detrás en el carril adyacente o se encuentran en el ángulo muerto o estima incorrectamente su distancia y/o velocidad.
Un asistente de cambio de carril ayuda al conductor en el cambio de carril, por ejemplo en maniobras de adelantamiento y regreso al carril. Una función esencial del asistente de cambio de carril se compone según esto en informar al conductor sobre vehículos o alertarlo de vehículos, que se aproximan rápidamente desde atrás o se encuentran en el ángulo muerto. Esto contribuye notablemente a la evitación de accidentes por colisión.
Al asistente de cambio de carril pertenece al menos un aparato de localización, por ejemplo un sensor radar, de infrarrojos o de ultrasonidos, que vigila la región trasera junto al y detrás del vehículo propio y envía informaciones sobre los vehículos afectados por el cambio de carril. Los vehículos afectados son en especial vehículos en el ángulo muerto así como vehículos que circulan detrás en el carril adyacente, al menos el vehículo que circula justo detrás.
De forma preferida también se tienen en cuenta vehículos que se encuentran aproximadamente a la misma altura que el vehículo propio y, de este modo, no están situados en el ángulo muerto pero aún así pueden no verse fácilmente por parte del conductor. Los datos de localización importantes son, al menos con relación a los vehículos que circulan detrás, las distancias a estos vehículos y naturalmente la distancia y la velocidad relativa del vehículo que circula justo detrás.
Con base en los datos de localización se determina el valor de peligro, que indica el potencial de riesgo de una colisión. Con ello es necesario tener en cuenta en general también la velocidad absoluta del propio vehículo, ya que a mayores velocidades debe mantenerse una mayor distancia de seguridad.
Si el conductor viene a indicar la intención de cambiar de carril, por ejemplo activando el intermitente o mediante una maniobra de desviación, el asistente de cambio de carril genera en función del valor de peligro establecido una señal de aviso, por ejemplo en forma de una señal acústica o en la forma de una indicación óptica en el tablero de instrumentos o en el retrovisor izquierdo.
En el caso de un valor de peligro multi-valor se emite la señal de aviso por ejemplo cuando el valor de peligro supera un determinado valor umbral, o la señal de aviso indica directamente el valor de peligro, por ejemplo mediante un volumen variable de la señal acústica o en la forma de una indicación de barras. El valor de peligro también puede utilizarse a elección para que el asistente de cambio de carril proponga activamente un cambio de carril, por ejemplo mediante la emisión de una señal de solicitud o implícitamente mediante la aplicación de un proceso de aceleración, con el que se prepara la incorporación al tráfico en el carril adyacente. La solicitud de cambio de carril puede depender después, aparte del valor de peligro, también de otros criterios.
Mediante el documento EP 16 12 082 A1 y el documento EP 04 43 185 A2 se conoce además también un asistente de cambio de carril, en el que aparte de la determinación de los datos de movimiento del vehículo de motor, también se tienen en cuenta las condiciones ambientales como influencias ambientales, que pueden influir de forma favorable o desfavorable en las posibilidades y capacidades de otros participantes en el tráfico, para reaccionar de forma apropiada al cambio de carril.
Influencias ambientales importantes son en especial aquellas que se refieren a las condiciones de visibilidad y al estado de la carretera, por ejemplo la niebla. El asistente de cambio de carril hace posible en especial tener en cuenta el hecho de que en estas condiciones el conductor del vehículo que circula detrás necesita una mayor distancia de seguridad. Del mismo modo es necesario mantener una mayor distancia de seguridad al vehículo que circula detrás, en el caso de un estado de carretera desfavorable, por ejemplo una vía húmeda por la lluvia o hielo deslizante.
Para detectar las condiciones ambientales está previsto un dispositivo de detección con uno o varios sensores, por ejemplo un sensor de luz ambiente, un avisador de lluvia, como el que ya se conoce para controlar el limpiaparabrisas, etc.. Del mismo modo son concebibles sensores especiales o sistemas de detección para hielo deslizante y/o para niebla.
Sin embargo, en la práctica ha resultado ser desventajoso en el caso del asistente de cambio de carril configurado de este modo que las condiciones ambientales, determinadas así mediante el dispositivo de detección, no permitan en todas las circunstancias obtener una conclusión sin errores sobre el entorno. De este modo por ejemplo el parabrisas puede estar humedecido, a causa de una limpieza del vehículo o por un vehículo que circule por delante, de tal modo que el sensor de lluvia active de forma apropiada la función de limpiaparabrisas, pero la conclusión final de que al propio tiempo también la vía está húmeda no sea adecuada.
El documento DE 103 23 639 A1 describe ya un procedimiento para detectar un objeto en reposo mediante el ajuste adaptativo de características de detección de un dispositivo de detección. Para esto se usan por ejemplo sensores de ultrasonidos o radar. Los parámetros de detección, por ejemplo los parámetros de sensibilidad del dispositivo de detección se adaptan de tal modo, en el caso señales de detección que se produzcan estocásticamente, por ejemplo señales parásitas activadas a causa del eco de suelo de gravilla suelta, hasta que éstas ya no se detecten.
Aparte de esto, el documento DE 41 20 397 A1 describe muy en general un dispositivo para la medición de distancias sin contacto, en especial para vehículos de motor. El dispositivo está equipado con dos sensores de ultrasonidos para medir la duración de una señal de ultrasonidos reflejada por un objeto. De aquí se calcula la distancia al objeto, en donde se usa adicionalmente como valor de corrección la duración de la señal entre los dos sensores dispuestos a una distancia prefijada.
Ejemplos para asistente de cambio de carril y los sensores correspondientes se describen en los documentos DE 40 05 444 A1, DE 35 00 152 A1, DE 296 20 357 U1, DE 43 13 588 C1, DE 195 26 452 C1 y US 6 400 3 08 B1.
La invención se ha impuesto la tarea de configurar un dispositivo de la clase citada, de tal manera que se descarten casi influencias erróneas indeseadas. En especial se pretende detectar de forma fiable las condiciones ambientales.
Esta tarea es resuelta conforme a la invención mediante al menos un sensor de ultrasonidos adicional para determinar las condiciones ambientales, al mismo tiempo que la determinación de la distancia o de la velocidad relativa del objeto móvil mediante el otro sensor de ultrasonidos.
Ventajas de la invención
Por medio de esto es posible por primera vez utilizar el sensor de ultrasonidos adicional para la determinación simultánea y, de este modo, la medición en gran medida libre de influencias erróneas de las condiciones ambientales. El sensor de ultrasonidos adicional sirve con ello en especial para la vigilancia constante de las condiciones ambientales, de tal modo que pueden asegurarse... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para un vehículo de motor con al menos un sensor de ultrasonidos (2, 3) para detectar un objeto móvil, en especial un vehículo que se aproxima, y con una unidad de control (5) para determinar la distancia y/o la velocidad relativa del objeto como valor de medición, por un lado, y las condiciones ambientales importantes con relación a la detección de valores de medición, por otro lado, en donde condiciones ambientales importantes son aquellas que se refieren a las condiciones de visibilidad, al estado de la carretera, a la temperatura, a la humedad o a la lluvia, así como con una unidad de distribución (7) para la activación de una señal en caso necesario a causa de los valores de medición así establecidos, caracterizado por al menos un sensor de ultrasonidos adicional (6) para determinar las condiciones ambientales, al mismo tiempo que la determinación de la distancia o de la velocidad relativa del objeto móvil mediante el otro sensor de ultrasonidos (2, 3).
2. Dispositivo según la reivindicación 1, caracterizado porque el sensor de ultrasonidos adicional (6) está ejecutado como componente integral de un vehículo de motor (1) o de un elemento constructivo del vehículo de motor (1).
3. Dispositivo según la reivindicación 1 ó 2, caracterizado porque el sensor de ultrasonidos adicional (6) está ejecutado como un componente de un dispositivo de medición de ultrasonidos disponible, en especial de una ayuda al aparcamiento electrónica.
4. Dispositivo según una de las reivindicaciones anteriores, caracterizado porque mediante la unidad de control (5) puede ajustarse automáticamente un valor umbral para activar la señal, a causa de las condiciones ambientales detectadas.
5. Dispositivo según una de las reivindicaciones anteriores, caracterizado porque el dispositivo presenta una unidad de introducción de datos para la modificación manual del valor umbral ajustado mediante la unidad de control (5).
6. Dispositivo según una de las reivindicaciones anteriores, caracterizado porque a partir de una unidad de memoria de la unidad de control (5) pueden elegirse parámetros sensoriales predeterminados del sensor de ultrasonidos (2, 3) a causa de las condiciones ambientales detectadas.
7. Dispositivo según una de las reivindicaciones anteriores, caracterizado porque puede ajustarse la sensibilidad del sensor de ultrasonidos (2, 3) a causa de las condiciones ambientales detectadas.
8. Dispositivo según una de las reivindicaciones anteriores, caracterizado porque el sensor de ultrasonidos (2, 6) presenta una región de detección que se extiende lateralmente y/o detrás del vehículo de motor.
9. Dispositivo según una de las reivindicaciones anteriores, caracterizado porque el dispositivo presenta medios para generar una señal de aviso óptica y/o acústica.
10. Dispositivo según una de las reivindicaciones anteriores, caracterizado porque el dispositivo está ejecutado para detectar un objeto móvil.
Patentes similares o relacionadas:
Sistema y procedimiento para la detección de blancos, del 23 de Noviembre de 2018, de Universiteit Antwerpen: Un sensor basado en sónar adaptado para la localización de un blanco en el aire, el sensor que comprende: - un emisor de banda ancha o ultraancha que emite […]
Arquitectura de un sistema multiestático acústico, del 28 de Diciembre de 2016, de THALES: Sistema acústico que consta al menos de una base emisora que consta de unos medios de emisión de un pulso sonar y de al menos […]
 Procedimiento de detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo de motor y vehículo de motor, del 27 de Agosto de 2014, de AUDI AG: Procedimiento para la detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo […]
Procedimiento de detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo de motor y vehículo de motor, del 27 de Agosto de 2014, de AUDI AG: Procedimiento para la detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo […]
 Sistema acústico y con soporte táctil de información a los ocupantes del vehículo, del 20 de Agosto de 2014, de RHEINMETALL LANDSYSTEME GMBH: Sistema acústico de información a los ocupantes del vehículo para la supervisión de un entorno exterior del vehículo, en particular para vehículos […]
Sistema acústico y con soporte táctil de información a los ocupantes del vehículo, del 20 de Agosto de 2014, de RHEINMETALL LANDSYSTEME GMBH: Sistema acústico de información a los ocupantes del vehículo para la supervisión de un entorno exterior del vehículo, en particular para vehículos […]
 Procedimiento y aparato para la detección y clasificación de un objeto que se encuentra en el agua, del 15 de Marzo de 2013, de Kongsberg Defence & Aerospace AS: Aparato con modo de funcionamiento variable para la detección y clasificación de un objeto móvil sumergido apartir de una señal pasiva generada por el objeto y […]
Procedimiento y aparato para la detección y clasificación de un objeto que se encuentra en el agua, del 15 de Marzo de 2013, de Kongsberg Defence & Aerospace AS: Aparato con modo de funcionamiento variable para la detección y clasificación de un objeto móvil sumergido apartir de una señal pasiva generada por el objeto y […]
MÉTODO PARA CARACTERIZAR EL TRÁFICO RODADO, del 22 de Marzo de 2012, de UNIVERSIDAD CARLOS III DE MADRID: La presente invención está dirigida a un método que permite caracterizar el tráfico rodado a lo largo de una vía de circulación que contiene […]
 PROCEDIMIENTO PARA LA MEDICION DE UN ESPACIO DE APARCAMIENTO Y LA DETECCION DE OBSTACULOS DURANTE EL PROCESO DE APARCAMIENTO DE UN VEHICULO, ASI COMO SISTEMA DE MEDICION CORRESPONDIENTE, del 28 de Mayo de 2010, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos […]
PROCEDIMIENTO PARA LA MEDICION DE UN ESPACIO DE APARCAMIENTO Y LA DETECCION DE OBSTACULOS DURANTE EL PROCESO DE APARCAMIENTO DE UN VEHICULO, ASI COMO SISTEMA DE MEDICION CORRESPONDIENTE, del 28 de Mayo de 2010, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos […]
 SISTEMA Y PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA POSICIÓN DE OBJETOS, del 5 de Abril de 2011, de SONITOR TECHNOLOGIES AS: Unidad de transmisión para su utilización en un sistema para determinar la posición de objetos a los que están fijadas las unidades de transmisión […]
SISTEMA Y PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA POSICIÓN DE OBJETOS, del 5 de Abril de 2011, de SONITOR TECHNOLOGIES AS: Unidad de transmisión para su utilización en un sistema para determinar la posición de objetos a los que están fijadas las unidades de transmisión […]