Dispositivo y método para la separación de una parte de una cosecha.
Dispositivo (1) para la separación de una cosecha de una parte de cosecha,
tal como un fruto u hoja, que comprendeun portador (2) provisto de medios de agarre (3) para dicha parte de la cosecha, y medios de corte (8) para dicha partede cosecha, dichos medios de agarre que comprenden elementos giratorios (3) dispuestos opuestos uno al otro, entrelos cuales un punto de pinzamiento (23) se delimita para la admisión de dicha parte de cosecha que debe ser quitada,caracterizado por el hecho de que dichos medios de corte (8) están dispuestos de manera que el punto de corte dedicha parte de cosecha se extiende en la extensión de dicho punto de pinzamiento.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NL2009/050190.
Solicitante: Prigrow Tomation B.V.
Nacionalidad solicitante: Países Bajos.
Dirección: Blaakse Wetering 44 3176 XB Poortugaal PAISES BAJOS.
Inventor/es: ZEELEN,RONALD, KNEPPERS,JOB LEONARDUS, VERSLUIJS,RICHARD PATRICK, SCHOUTEN,ROBERT ALEXANDER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01D46/00 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01D RECOLECCION; SIEGA. › Recolección de frutas, hortalizas, lúpulo o productos similares; Dispositivos para sacudir los árboles o arbustos.
- A01D46/30 A01D […] › A01D 46/00 Recolección de frutas, hortalizas, lúpulo o productos similares; Dispositivos para sacudir los árboles o arbustos. › Dispositivos robotizados para recoger los productos de la cosecha uno por uno.
PDF original: ES-2445693_T3.pdf
Fragmento de la descripción:
Dispositivo y método para la separación de una parte de una cosecha [0001] La presente invención se refiere a un dispositivo para la eliminación de una parte, tal como una hoja o fruto, del resto de la cosecha. La invención se refiere, por ejemplo, a la eliminación de hojas, frutos y similares de cosechas, tales comos tomates y pepinos y similares. Para conseguirlo, hay varias propuestas en el estado de la técnica para la eliminación de hojas, frutos y similares con el uso de un brazo robótico al que están fijados sistemas de corte. El brazo robótico se mueve en la cosecha y se aplican técnicas de visión para realizar la separación entre la cosecha y la parte pertinente de la cosecha en el punto deseado.
No obstante, surge frecuentemente el problema de que no es muy posible separar la parte del resto de la cosecha en el punto deseado.
En el caso de los tomates y de otras cosechas, por ejemplo, es deseable que las hojas se quiten lo más cerca posible del tallo principal. Esto significa que el pecíolo de la hoja debe ser cortado lo más cerca posible de su unión al tallo principal. Si un robot con una cuchilla cortante se mueve a través de la cosecha, frecuentemente no es posible alcanzar tal posición. Si se aplica fuerza en el brazo para alcanzar la posición requerida, esto generalmente resulta en que el tallo principal es apartado. Esto significa que la cosecha es sometida a cargas indeseables y que el objetivo en mente, es decir alcanzar la separación en la posición óptima, no se consigue.
Un dispositivo de cosecha para la cosecha de hojas de té es conocido por GB 673306, donde el lado superior de una cosecha es sujetado entre dos rodillos y es inclinado. El corte en una posición inferior de la parte pertinente de la cosecha es luego realizado. Sujetando la parte de la cosecha entre los dos rodillos, la posición del dispositivo de corte no cambia.
De EP 1891852 un método y dispositivo son conocidos donde un tallo principal se sujeta por dos pinzas distanciadas y es llevado hasta una estación de corte por tales pinzas. La estación de corte corta un tallo lateral del tallo principal y luego el tallo principal se libera y un tallo lateral siguiente es quitado de la misma manera.
El objetivo de la presente invención es proporcionar un método y dispositivo con el cual el punto de separación deseado puede ser alcanzado de la mejor manera posible, después de lo cual la separación puede en realidad ser realizada en ese punto.
Este objetivo se consigue con el dispositivo como se ha descrito anteriormente, donde los medios de corte son fijados de manera que el punto de corte de dicha parte se extiende en la extensión del punto de pinzamiento.
Según la presente invención, la parte pertinente de la cosecha es sujetada, después de lo cual tiene lugar el movimiento de los medios de separación, tales como una cuchilla, con respecto a tal parte de la cosecha. Éste es un desplazamiento positivo, lo que significa que es posible que el robot con los medios de agarre (efector final) se mueva adicionalmente hacia el tallo principal, pero es también posible llevar el pecíolo más cerca del robot con el efector final (o combinaciones de ambos) . No obstante, en ambos casos, la parte de la cosecha misma se toma como el punto de referencia para la selección de la posición de corte posible. Por consiguiente, ya no surge la situación en la que no es posible que la parte de la cosecha sea agarrada en el punto de separación requerido. Según la invención, la cosecha no es cortada o inclinada, y el corte tiene lugar de acuerdo con la dirección en la que se mueve en el punto de pinzamiento. El corte preferiblemente tiene lugar en un punto localizado entre el tallo principal y el punto de pinzamiento, es decir arriba del punto de pinzamiento. Con este fin, durante esta operación los medios de corte son preferiblemente situados en la dirección de colocación del dispositivo, delante del punto de pinzamiento.
Según una forma de realización particular de la invención, la parte de la cosecha pertinente no es liberada después de la separación, por ejemplo, por corte o recorte, pero es positivamente eliminada.
Los elementos giratorios pueden tener cualquier forma concebible. Es así posible que estos sean construidos elípticamente. Es también posible que los rodillos sean construidos cilíndricamente y proveerlos con una sección aplanada. Los rodillos preferiblemente consisten en un material flexible. Si una forma de realización en sección plana de los rodillos es aplicada, como las partes en sección plana de los dos rodillos están opuestas una a la otra, un hueco surge entre ellas en el que la parte del pecíolo puede ser recibida. Durante la rotación de los rodillos, la parte del pecíolo entre los rodillos se introduce y sujeta firmemente por los rodillos. Posteriormente, el movimiento de la parte del pecíolo, como se ha descrito anteriormente, con respecto al brazo sobre el que los rodillos son fijados puede tener lugar. La posición final, es decir el final del movimiento de la parte de la cosecha con respecto a los rodillos, se determina bien por alcance de la fuerza de agarre máxima o por alcance de un tope. La rotación de los rodillos es preferiblemente discontinua.
En el primer caso, en particular en la forma de realización de los rodillos simétricamente construidos, tales comos rodillos con las partes en sección plana, la rotación es continua hasta un máximo hasta que allí ya no parece haber acción de sujeción. En el segundo caso, la fuerza de agarre máxima de la parte de cosecha, por ejemplo, se puede medir por el consumo de energía en el motor de los rodillos. Si éste excede un valor máximo dado, ya no tendrá lugar más movimiento de la parte de la cosecha y de los rodillos.
Los rodillos son preferiblemente conectados juntos por medios mecánicos.
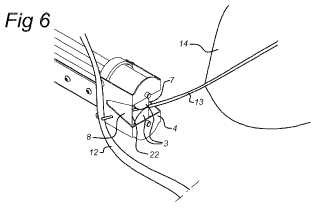
Para la fijación adicional de la parte de hoja, hay un alojamiento para recibir la parte de pecíolo en la extensión del punto de pinzamiento entre los rodillos, donde la parte del pecíolo debe ser recibida, en uno o varios lados del mismo. Uno de estos alojamientos es realizado de manera que puede actuar en cooperación con el borde cortante de una cuchilla, de manera que la parte del pecíolo se puede quitar del tallo principal en el punto deseado. Esta cuchilla, y más específicamente el borde externo de la ésta, se extiende sustancialmente paralela desde la línea central de un rodillo.
Es también posible, no obstante, unir una cuchilla o cualquier otro medio de separación a ambos lados, de modo que la construcción puede ser fácilmente colocada en la mejor posición posible con respecto al pecíolo de la hoja o la fruta. El medio de transmisión de los rodillos está preferiblemente localizado centralmente y está a una distancia considerable desde los rodillos, por ejemplo a una distancia de 20 centímetros.
Será entendido, no obstante, que las formas de realización descritas anteriormente son meramente ilustrativas.
El medio de transmisión de los rodillos u otros elementos eléctricos se pueden construir en cualquier manera concebible.
Según otra forma de realización particular de la invención, los rodillos tienen esencialmente el mismo diámetro y, más específicamente, son prácticamente idénticos.
Es posible con esta invención sujetar un pecíolo (hoja) de una manera específica.
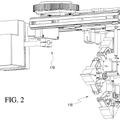
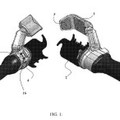
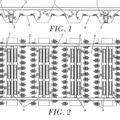
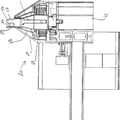
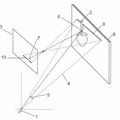
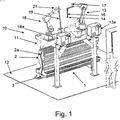
El robot al que los medios de agarre son fijados se pueden construir de cualquier manera concebible. Ejemplos incluyen un brazo (telescópico) de robot, un robot que funciona con tres rayos, etcétera. Fig. 1a-c muestra una vista, esquemática en perspectiva de un ejemplo de la separación de una hoja; Fig. 2 muestra varios tallos de los cuales se tienen que quitar partes de la hoja con la ayuda de una disposición esquemáticamente ilustrada según la invención; Fig. 3 muestra el brazo según la presente invención durante la aceptación de un elemento de pecíolo; Fig. 4 muestra los medios de separación según la presente invención durante el agarre de un elemento de pecíolo; Fig. 5 muestra los medios de separación según la presente invención durante el movimiento fijado de una parte de pecíolo según la presente invención; y Fig. 6 muestra el corte del elemento de pecíolo del tallo principal que utiliza el dispositivo según la invención.
El método según la invención se describirá esquemáticamente con más detalle con referencia a la Figura 1a-c.
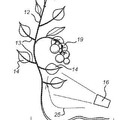
En la Figura 1 una cosecha 11 es indicada, que comprende un tallo central 12, varias hojas 14 unidas al tallo principal por un pecíolo 13 y frutas 19. Será entendido que, dependiendo de la cosecha en cuestión, el tallo principal 11 puede tener... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo (1) para la separación de una cosecha de una parte de cosecha, tal como un fruto u hoja, que comprende un portador (2) provisto de medios de agarre (3) para dicha parte de la cosecha, y medios de corte (8) para dicha parte de cosecha, dichos medios de agarre que comprenden elementos giratorios (3) dispuestos opuestos uno al otro, entre los cuales un punto de pinzamiento (23) se delimita para la admisión de dicha parte de cosecha que debe ser quitada, caracterizado por el hecho de que dichos medios de corte (8) están dispuestos de manera que el punto de corte de dicha parte de cosecha se extiende en la extensión de dicho punto de pinzamiento.
2. Dispositivo según la reivindicación 1, donde dichas partes giratorias comprenden elementos de rodillo.
3. Dispositivo según la reivindicación 2, donde los elementos de rodillo comprenden una parte en sección plana.
4. Dispositivo según la reivindicación 2 o 3, donde los elementos de rodillo son elípticos. 15
5. Dispositivo según cualquiera de las de las reivindicaciones precedentes, donde dichos medios de corte comprenden una cuchilla móvil, cuyo borde cortante (22) se puede mover a lo largo de la extensión de dicho punto de pinzamiento (23) .
6. Dispositivo según la reivindicación 5, que comprende las dos cuchillas cortantes localizadas a una distancia una de la otra.
7. Dispositivo según cualquiera de las de las reivindicaciones precedentes, donde una guía (7) está provista en la línea tangencial de proyección de dicho punto de pinzamiento para dicha parte que debe ser quitada. 25
8. Dispositivo según cualquiera de las reivindicaciones precedentes, donde los medios de transmisión de dichas partes giratorias (3) están dispuestos a una distancia de al menos 20 cm desde dichas partes giratorias.
9. Dispositivo según cualquiera de las reivindicaciones precedentes, donde dicho portador comprende la parte móvil de 30 un robot.
10. Método para la separación de una cosecha de una parte de cosecha, tal como un fruto u hoja, que comprende el acoplamiento de dicha parte de cosecha y la separación de dicha parte de cosecha desde ahí en un punto muy próximo al tallo principal de dicha cosecha, caracterizado por el hecho de que se usa un dispositivo según la reivindicación 1
por el cual después del agarre de dicha parte de cosecha, dichos medios de corte se mueven con respecto a dicha parte de cosecha girando los elementos giratorios (3) antes de que la separación sea realizada.
11. Método según la reivindicación 10, donde la parte de cosecha se une por un pecíolo al tallo principal de la cosecha,
donde dicha separación comprende la posición de los medios de corte muy próximos al pecíolo del tallo principal. 40
12. Método según la reivindicación 11, donde la posición comprende el movimiento de dicha parte de la cosecha, mientras dicha parte de cosecha es agarrada, hacia los medios de corte.
13. Método según cualquiera de las reivindicaciones 10-12, donde dicha separación comprende el corte o recorte. 45
14. Método según cualquiera de las reivindicaciones precedentes, donde dicha parte de cosecha permanece agarrada después de la separación de la misma y se transporta fuera del rango de la cosecha.
15. Método según cualquiera de las reivindicaciones 10-14, donde después de la separación de la parte de la cosecha
del resto de la cosecha otras cuchillas se despliegan de forma activa para permitir la eliminación de la parte del pecíolo aplastado de la fruta agarrada entre los elementos de rodillo.
Patentes similares o relacionadas:
 Cosecha selectiva automatizada de cultivos, del 28 de Agosto de 2019, de Harvest Croo, LLC: Un dispositivo para cosechar selectivamente cultivos en una planta, comprendiendo el dispositivo:
un aparato de recogida , pudiéndose rotar el aparato […]
Cosecha selectiva automatizada de cultivos, del 28 de Agosto de 2019, de Harvest Croo, LLC: Un dispositivo para cosechar selectivamente cultivos en una planta, comprendiendo el dispositivo:
un aparato de recogida , pudiéndose rotar el aparato […]
 EQUIPO PORTÁTIL PARA LA COSECHA SELECTIVACON IDENTIFICACIÓN DE FRUTOS POR COLOR, del 20 de Agosto de 2015, de FEDERACION NACIONAL DE CAFETEROS DE COLOMBIA: La presente invención corresponde a un equipo portátil para la cosecha selectiva y un método para identificación de frutos y cosecha selectiva de frutos de café u […]
EQUIPO PORTÁTIL PARA LA COSECHA SELECTIVACON IDENTIFICACIÓN DE FRUTOS POR COLOR, del 20 de Agosto de 2015, de FEDERACION NACIONAL DE CAFETEROS DE COLOMBIA: La presente invención corresponde a un equipo portátil para la cosecha selectiva y un método para identificación de frutos y cosecha selectiva de frutos de café u […]
 Método y dispositivo para la retirada de una hoja de una planta de cultivo, del 27 de Mayo de 2013, de Zeelen, Ronald: Método para la retirada de hojas de una planta de cultivo , que comprende la observación de una primerahoja de la planta de cultivo desde […]
Método y dispositivo para la retirada de una hoja de una planta de cultivo, del 27 de Mayo de 2013, de Zeelen, Ronald: Método para la retirada de hojas de una planta de cultivo , que comprende la observación de una primerahoja de la planta de cultivo desde […]
 MAQUINA PARA LA RECOLECCION AUTOMATICA DE FRUTOS CULTIVADOS EN HILERAS, del 3 de Enero de 2011, de SOLUCIONES ROBOTICAS AGRICOLAS SLU: Máquina para la recolección automática de frutos cultivados en hileras, comprendiendo un vehículo autónomo, de estructura tubular , conformada […]
MAQUINA PARA LA RECOLECCION AUTOMATICA DE FRUTOS CULTIVADOS EN HILERAS, del 3 de Enero de 2011, de SOLUCIONES ROBOTICAS AGRICOLAS SLU: Máquina para la recolección automática de frutos cultivados en hileras, comprendiendo un vehículo autónomo, de estructura tubular , conformada […]
 PROCEDIMIENTO Y VEHICULO DE RECOGIDA PARA LA RECOLECCION DE CULTIVOS QUE CRECEN EN TALLOS, del 20 de Mayo de 2010, de EGATEC A/S: Un procedimiento para la recolección de frutas o verduras, en particular frutas o verduras en ramilletes o racimos, como tomates en ramillete, uvas y similares, […]
PROCEDIMIENTO Y VEHICULO DE RECOGIDA PARA LA RECOLECCION DE CULTIVOS QUE CRECEN EN TALLOS, del 20 de Mayo de 2010, de EGATEC A/S: Un procedimiento para la recolección de frutas o verduras, en particular frutas o verduras en ramilletes o racimos, como tomates en ramillete, uvas y similares, […]
 DETECTOR DE PEDUNCULOS Y TALLOS VEGETALES BASADO EN LA DESIGNACION OPTICA CON LASER DE LINEA, del 4 de Diciembre de 2009, de UNIVERSIDAD POLITECNICA DE MADRID: Detector de pedúnculos y tallos vegetales basado en la designación óptica con láser de línea. Esta invención resuelve el problema de designar y estimar con precisión […]
DETECTOR DE PEDUNCULOS Y TALLOS VEGETALES BASADO EN LA DESIGNACION OPTICA CON LASER DE LINEA, del 4 de Diciembre de 2009, de UNIVERSIDAD POLITECNICA DE MADRID: Detector de pedúnculos y tallos vegetales basado en la designación óptica con láser de línea. Esta invención resuelve el problema de designar y estimar con precisión […]
HELICOPTERO CONTROLADO REMOTAMENTE., del 1 de Noviembre de 2006, de MAFLEX S.R.L.: Aparato para recolectar aceitunas, bayas o bien otros frutos, o para llevar a cabo otras operaciones en follaje de plantas, tales como podado o rociado […]
 DISPOSITIVO PARA TRATAR PLANTAS DE CULTIVO QUE CRECEN EN TALLOS, del 1 de Mayo de 2008, de BEHEERSMAATSCHAPPIJ G.A. CH.M.: Dispositivo para tratar plantas de cultivo que crecen en tallos en un lecho de cultivo , siendo móviles entre sí el dispositivo y el lecho de cultivo, constando el dispositivo […]
DISPOSITIVO PARA TRATAR PLANTAS DE CULTIVO QUE CRECEN EN TALLOS, del 1 de Mayo de 2008, de BEHEERSMAATSCHAPPIJ G.A. CH.M.: Dispositivo para tratar plantas de cultivo que crecen en tallos en un lecho de cultivo , siendo móviles entre sí el dispositivo y el lecho de cultivo, constando el dispositivo […]