Dispositivo de mecanizado y procedimiento de mecanizado para el mecanizado de objetos mediante una unidad de máquina.
Dispositivo de mecanizado (100; 300) que comprende:
un dispositivo de prescripción (102;
302; 404) para prescribir un valor de tiempo de acción de consigna que estáasignado a un primer juego de parámetros ambientales; y
una unidad de máquina (104; 304; 510; 520) con un elemento actor (106; 306) para realizar una acciónbasándose en el valor de tiempo de acción de consigna prescrito;
estando realizado el dispositivo de mecanizado (100, 300) para detectar un valor de tiempo de acción real, queestá asignado a un segundo juego de parámetros ambientales reinantes en la unidad de máquina (104; 304;510; 520) y para actualizar el dispositivo de prescripción (102; 302; 404) basándose en el segundo juego deparámetros ambientales y el valor de tiempo de acción real asignado
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08171472.
Solicitante: HOMAG HOLZBEARBEITUNGSSYSTEME AG.
Nacionalidad solicitante: Alemania.
Dirección: HOMAGSTRASSE 3-5 72296 SCHOPFLOCH ALEMANIA.
Inventor/es: Hils,Winfried.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05B13/02 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 13/00 Sistemas de control adaptativos, es decir, sistemas que se regulan a sí mismos para obtener un rendimiento óptimo siguiendo un criterio predeterminado (G05B 19/00 tiene prioridad; aprendizaje automático G06N 20/00). › eléctricos.
- G05B19/42 G05B […] › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Sistemas de registro y de reproducción, es decir, en los que el programa es registrado a partir de un ciclo de operaciones, p. ej. el ciclo de operaciones está controlado a mano, y a continuación este registro es reproducido en la misma máquina.
PDF original: ES-2392115_T3.pdf
Fragmento de la descripción:
Dispositivo de mecanizado y procedimiento de mecanizado para el mecanizado de objetos mediante una unidad de máquina
Campo técnico
La presente invención se refiere a un dispositivo de mecanizado con un dispositivo de prescripción y una unidad de máquina y un elemento actor para realizar acciones.
Estado de la técnica
Los dispositivos y procedimientos en los que un elemento actor realiza una acción como consecuencia de un requerimiento son sobradamente conocidos.
Una acción se refiere aquí, p.ej., al funcionamiento de un pistón neumático, al calentamiento de un dispositivo, en particular de un recipiente de pegamento, así como al funcionamiento de un motor paso a paso, en particular de un motor paso a paso con plato giratorio acoplado.
Todas estas acciones tienen en común que la duración de una acción y, por lo tanto, también posiblemente su fin pueden variar en función de distintas influencias.
Para asegurar que las acciones que están integradas fijamente en una cadena de procesos o un desarrollo de un programa terminen en el momento correcto, en los dispositivos de mecanizado conocidos y los procedimientos de mecanizado conocidos se indica al dispositivo de mecanizado que realiza la acción el requerimiento para realizar una acción con un tiempo de preparación adicional sobredimensionado o subdimensionado en cuanto al tiempo antes del comienzo de la acción, de modo que pueda asegurarse una realización de la acción aproximadamente dentro del tiempo.
Gracias a ello, el dispositivo de mecanizado es capaz de realizar una acción aproximadamente a tiempo, aunque requiere por ejemplo más tiempo del que realmente es necesario. De este modo no es posible iniciar o terminar acciones en un momento exacto.
El comportamiento de salida de un pistón neumático depende, por ejemplo, de la temperatura, p.ej. por la dependencia de la temperatura/presión del gas contenido y/o de los lubricantes usados, de modo que a temperaturas/presiones bajas puede contarse con una salida más lenta, lo cual podría tenerse en cuenta al elegirse el tiempo de preparación.
No obstante, habitualmente la elección del tiempo de preparación se estima sólo de forma aproximada, o se intenta mantener constantes los parámetros, como por ejemplo la temperatura del aire comprimido o la presión de la instalación de aire comprimido para el funcionamiento del pistón neumático. Esto puede conducir a un esfuerzo considerable para la puesta a disposición de parámetros constantes y a resultados nada satisfactorios, sobre todo en caso de aplicaciones críticas en cuanto al tiempo, como en máquinas de funcionamiento continuo.
El documento US6197115B1 da a conocer un dispositivo de mecanizado, que comprende un dispositivo de prescripción para prescribir un valor de tiempo de acción de consigna, que está asignado a un primer juego de parámetros ambientales.
El documento US 5, 735, 134 da a conocer un procedimiento de regulación en el que debe irse a un punto de servicio en tiempo real de forma optimizada en cuanto a la energía. El regulador se realimenta durante este proceso a la optimización.
Descripción de la invención
La invención tiene el objetivo de crear un dispositivo de mecanizado y un procedimiento de mecanizado que resuelvan al menos algunos de los problemas conocidos por el estado de la técnica y que, además, sean adecuados para emplear el dispositivo de mecanizado de forma eficiente y optimizada en cuanto al tiempo.
El objetivo se consigue, por un lado, mediante el dispositivo según la reivindicación 1 y mediante el procedimiento según la reivindicación 12. Además, el objetivo se consigue también mediante una máquina de funcionamiento continuo según la reivindicación 15.
En las reivindicaciones subordinadas se indican configuraciones preferibles del dispositivo de mecanizado según la invención y del procedimiento de mecanizado según la invención.
La invención está basada en la idea de usar de forma optimizada un dispositivo de mecanizado teniendo en cuenta los parámetros ambientales predominantes. Por consiguiente, el dispositivo de mecanizado presenta un dispositivo de prescripción para prescribir un valor de tiempo de acción de consigna, que está asignado a un primer juego de parámetros ambientales y una unidad de máquina con un elemento actor para realizar una acción basándose en el
valor de tiempo de acción de consigna prescrito. El dispositivo de mecanizado está realizado para registrar un valor de tiempo de acción real, que está asignado a un segundo juego de parámetros ambientales reinantes en la unidad de máquina y para la actualización del dispositivo de prescripción basándose en el segundo juego de parámetros ambientales y en el valor de tiempo de acción real asignado.
De este modo pueden asignarse a un juego de parámetros ambientales los valores de tiempo de acción reales de acciones, en particular de acciones inestables en cuanto al tiempo, es decir, acciones, en las que el tiempo de acción real varía fuertemente en caso de variar los parámetros ambientales. Mediante la actualización del dispositivo de prescripción basándose en el segundo juego de parámetros ambientales y en el valor de tiempo de acción real asignado, el dispositivo de prescripción es capaz de forma especialmente ventajosa asignar en el funcionamiento continuo del dispositivo de mecanizado un primer juego de parámetros ambientales a un valor de tiempo de acción de consigna cercano a un valor de acción de consigna. Gracias a la asignación de valores de tiempo de acción a parámetros ambientales y la actualización de éstos en el dispositivo de prescripción es posible de una forma especialmente ventajosa emplear un dispositivo de mecanizado de tal modo que realice las acciones a realizar según los requerimientos y, sobre todo, de forma optimizada en cuanto al tiempo, por ejemplo que se minimicen las desviaciones entre los valores reales y los valores de consigna.
Según una configuración de la invención, el dispositivo de mecanizado, en particular la unidad de máquina, presenta una primera unidad de detección para detectar el valor de tiempo de acción real de la acción. Estos valores de acción reales de la acción pueden caracterizar la duración real de una acción. Como alternativa, el valor de tiempo de acción real puede caracterizar el final de la realización de una acción o el comienzo de una acción. La unidad de detección detecta estos valores de tiempo de acción reales y los transmite al dispositivo de mecanizado, en particular al dispositivo de prescripción y/o la unidad de máquina.
Según otra forma de realización, la unidad de máquina presenta una segunda unidad de detección para detectar el segundo juego de los parámetros ambientales reinantes en la unidad de máquina. Estos parámetros ambientales están en relación con el valor de tiempo de acción real. Estos parámetros ambientales comprenden por ejemplo la presión del aire, la temperatura predominante, el tiempo de parada de la máquina desde la realización de la última acción, así como la temperatura de la luz. Mediante la detección de los parámetros ambientales reinantes en la unidad de máquina, en particular del segundo juego de parámetros ambientales reinantes en la unidad de máquina, es posible de forma especialmente ventajosa establecer una relación entre estos parámetros ambientales y el valor de tiempo de acción real y actualizar así el dispositivo de prescripción.
Según otra forma de realización especialmente preferible, el dispositivo de prescripción presenta una memoria para almacenar parámetros ambientales, que están en relación con valores de tiempo de acción asignados y una unidad de control para la actualización de los parámetros ambientales. La memoria puede estar realizada para almacenar los parámetros ambientales y los valores de tiempo de acción asignados en forma de tablas. Además, la unidad de control puede estar realizada para definir al menos una función, asignando la función un valor de tiempo de acción a al menos un parámetro ambiental. Gracias al almacenamiento de los parámetros ambientales y de los valores de tiempo de acción asignados a los parámetros ambientales y gracias a la definición de una función que asigna un valor de tiempo de acción a al menos un parámetro ambiental, es posible de forma especialmente ventajosa describir una... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de mecanizado (100; 300) que comprende:
un dispositivo de prescripción (102; 302; 404) para prescribir un valor de tiempo de acción de consigna que está asignado a un primer juego de parámetros ambientales; y una unidad de máquina (104; 304; 510; 520) con un elemento actor (106; 306) para realizar una acción basándose en el valor de tiempo de acción de consigna prescrito; estando realizado el dispositivo de mecanizado (100, 300) para detectar un valor de tiempo de acción real, que está asignado a un segundo juego de parámetros ambientales reinantes en la unidad de máquina (104; 304; 510; 520) y para actualizar el dispositivo de prescripción (102; 302; 404) basándose en el segundo juego de parámetros ambientales y el valor de tiempo de acción real asignado.
2. Dispositivo de mecanizado según la reivindicación 1, comprendiendo la unidad de máquina (104; 304; 510; 520) además una primera unidad de detección (312; 406) para detectar el valor de tiempo de acción real de la acción.
3. Dispositivo de mecanizado según la reivindicación 1 ó 2, comprendiendo la unidad de máquina (104; 304; 510; 520) además una segunda unidad de detección (314; 406) para detectar el segundo juego de parámetros ambientales reinantes en la unidad de máquina (104; 304; 510; 520) que están en relación con el valor de tiempo de acción real.
4. Dispositivo de mecanizado según una de las reivindicaciones 1 a 3, comprendiendo el dispositivo de prescripción (102; 302; 404) una memoria (310) para almacenar parámetros ambientales que están en relación con los valores de tiempo de acción asignados; y una unidad de control (308) para la actualización de los parámetros ambientales.
5. Dispositivo de mecanizado según la reivindicación 4, estando realizada la memoria (310) para almacenar los parámetros ambientales y los valores de tiempo de acción asignados en forma de tablas o estando realizada la unidad de control (308) para definir al menos una función que asigna un valor de tiempo de acción a al menos un parámetro ambiental.
6. Dispositivo de mecanizado según la reivindicación 4 ó 5, estando realizada la unidad de control (308) para transmitir el segundo juego detectado de parámetros ambientales que están en relación con el valor de tiempo de acción real detectado a la memoria (310) , para actualizar los parámetros ambientales en la memoria (310) .
7. Dispositivo de mecanizado según una de las reivindicaciones 4 a 6, estando realizada la unidad de control (308) para determinar al valor de tiempo de acción de consigna basándose en el segundo juego detectado de parámetros ambientales, en los parámetros ambientales almacenados y en los valores de tiempo de acción asignados.
8. Dispositivo de mecanizado según una de las reivindicaciones 4 a 7, estando realizada la unidad de control (308) para determinar una desviación entre el valor de tiempo de acción de consigna y el valor de tiempo de acción real y para actualizar la memoria (310) cuando la desviación está por encima de un valor umbral.
9. Dispositivo de mecanizado según una de las reivindicaciones 1 a 8, indicando el valor de tiempo de acción el momento en el que ha terminado la realización de la acción o el momento en el que comienza la realización de la acción o la duración que es necesaria para la realización de la acción.
10. Dispositivo de mecanizado según una de las reivindicaciones 1 a 9, estando realizado el elemento actor (106; 306) para la realización de la acción basándose en el valor de tiempo de acción de consigna, que está basado en un tiempo del sistema del dispositivo de mecanizado (100; 300) y un tiempo del evento detectado de forma externa.
11. Dispositivo de mecanizado según una de las reivindicaciones 1 a 10, comprendiendo un juego de parámetros ambientales al menos un parámetro ambiental y correspondiendo al menos un parámetro ambiental del primer juego a un parámetro ambiental del segundo juego.
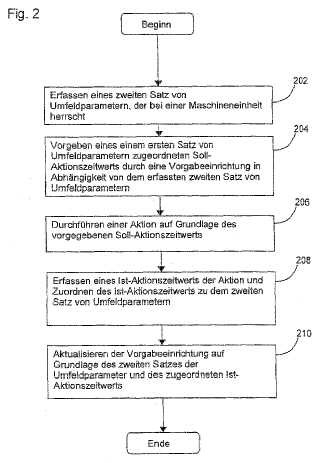
12. Procedimiento de mecanizado para un dispositivo de mecanizado, en particular un dispositivo de mecanizado según una de las reivindicaciones anteriores, que comprende las siguientes etapas:
- detección de un segundo juego de parámetros ambientales reinantes en una unidad de máquina (104; 304; 510; 520) del dispositivo de mecanizado (100; 300) ;
- prescripción de un valor de tiempo de acción de consigna asignado a un primer juego de parámetros ambientales mediante un dispositivo de prescripción (102; 302; 404) ;
- realización de una acción basándose en el valor de tiempo de acción de consigna prescrito;
- detección de un valor de tiempo de acción real de la acción y asignación del valor de tiempo de acción real al segundo juego de parámetros ambientales; y
- actualización del dispositivo de prescripción (102; 302; 404) basándose en el segundo juego de parámetros ambientales y en el valor de tiempo de acción real asignado.
13. Procedimiento de mecanizado según la reivindicación 12, comprendiendo la actualización:
el almacenamiento del segundo juego de parámetros ambientales que están en relación con el valor de tiempo de acción real.
14. Procedimiento de mecanizado según la reivindicación 12 ó 13, comprendiendo la prescripción:
la determinación del valor de tiempo de acción de consigna basándose en parámetros ambientales 5 almacenados en el dispositivo de prescripción (102; 302; 404) y en valores de tiempo de acción asignados en función del segundo juego detectado de parámetros ambientales.
15. Máquina de funcionamiento contínuo con un dispositivo de mecanizado según al menos una de las reivindicaciones anteriores 1 a 11.
Patentes similares o relacionadas:
Puesta en servicio automática de controlador para convertidores electrónicos de potencia activos trifásicos, del 1 de Julio de 2020, de OTIS ELEVATOR COMPANY: Un sistema para modular un nivel de corriente de salida de un convertidor de potencia bidireccional conectado a una red para garantizar que se proporcione […]
 Sistema de control, del 29 de Abril de 2020, de COVENTRY UNIVERSITY: Un sistema de control para controlar una instalación , comprendiendo el sistema de control un bucle de retroalimentación que incluye un integrador […]
Sistema de control, del 29 de Abril de 2020, de COVENTRY UNIVERSITY: Un sistema de control para controlar una instalación , comprendiendo el sistema de control un bucle de retroalimentación que incluye un integrador […]
Procedimiento y aparato de administración de energía eléctrica y dispositivo electrónico, del 1 de Enero de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento de administración de energía eléctrica, aplicado en un dispositivo electrónico cargado por un adaptador de alimentación eléctrica […]
MÉTODO DE CONTROL DE UN CONVERTIDOR ELECTRÓNICO CC/CA TRIFÁSICO CON FALLO EN UNA FASE, del 19 de Diciembre de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: Método de control de un convertidor electrónico CC/CA trifásico con fallo en una fase. Se divulga un método de control de un convertidor electrónico de CC/CA trifásico […]
Método y sistema de refrigeración redundante, del 5 de Diciembre de 2019, de Dawes, Warwick Graham Andrew: Un método para implementar un sistema de refrigeración redundante para proporcionar una carga de refrigeración máxima predeterminada para el aire en un espacio acondicionado […]
Método de control de bomba, del 4 de Diciembre de 2019, de Grundfos Holding A/S: Procedimiento de control de bombas para controlar el funcionamiento de un sistema der bombas con al menos dos equipos de bombas , que están dispuestos en paralelo […]
MÉTODO Y SISTEMA DE CONTROL PREDICTIVO DE UN CONVERTIDOR CC/CA, del 2 de Diciembre de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: Método y sistema de control predictivo de un convertidor CC/CA. Se divulga un método y un sistema de control predictivo de un convertidor CC/CA para transmisión […]
Equilibrio de par síncrono en sistemas de múltiples bombas, del 5 de Noviembre de 2019, de ITT Manufacturing Enterprises LLC: Un método de control en un sistema que tiene múltiples bombas (18a-18d), en donde las múltiples bombas (18a-18d) se accionan y funcionan conjuntamente […]