Dispositivo estabilizador para una máquina de trabajo.
Un dispositivo estabilizador para una máquina de trabajo, estando ésta equipada con un bastidor (3) que presenta un primer y un segundo par de dispositivos estabilizadores (6A,
6P) montados respectivamente en los extremos frontal y trasero, en cada par de dispositivos estabilizadores, los dispositivos estabilizadores están dispuestos de manera simétrica y transversal al bastidor (3), de modo que los correspondientes pies de apoyo se orientan hacia fuera, en direcciones opuestas respecto de la línea longitudinal media del bastidor, dichos pares de dispositivos estabilizadores (6A, 6P) están concebidos para que, al estar en posición operativa, definan una base de apoyo con una longitud (X) igual a la distancia longitudinal entre los mismos pares de dispositivos estabilizadores (6A, 6P), y con una anchura (Y) igual a la distancia transversal entre los pies de apoyo de cada uno de los mismos pares de dispositivos estabilizadores, cada uno de los dispositivos estabilizadores (161, 162, 261, 262, 361, 362) comprende, como mínimo, un primer y un segundo módulo (10, 11), interconectados entre sí, uno de los cuales está provisto de dispositivo de elongación lineal (12), mientras que el otro está provisto de dispositivo de elongación a compás (13), los mencionados dispositivos de elongación lineal (12) y a compás (13) están adaptados para ser operados en relación de fase para definir una posición inactiva retraída (R), en la que el correspondiente pie de apoyo (19, 25) está elevado del suelo y el bulto de dicho dispositivo estabilizador (161, 162, 261, 262, 361, 362) está dentro de los límites de tamaño máximos de la mencionada máquina (M), y una posición operativa extendida (L), en la que el pie de apoyo (19, 25) se pone en contacto con el suelo a una distancia predeterminada de la línea media longitudinal, caracterizado porque: el primer módulo (10) está equipado con el dispositivo lineal de elongación (12) e incluye un elemento tubular (30) concebido para sostener y guiar un vástago deslizante (21) operado por un primer actuador relevante (22) entre una posición interior (V1) y una posición exterior (V2); el elemento tubular (30) es llevado de modo oscilante por una placa vertical transversal al bastidor (3) de la máquina (M) y está sometido a la acción de un dispositivo de fuerza (31) concebido para definir, para el mismo elemento tubular (30), una posición inactiva horizontal (J1) y una posición operativa inclinada (J2); el segundo módulo (11) se asocia al vástago deslizante (21), estando equipado con el dispositivo de elongación a compás (13) e incluye un brazo oscilante (23), articulado a un extremo exterior del vástago deslizante (21) y operado por un segundo actuador relevante (24) entre una posición elevada (K1) y una posición descendida (K2); el pie de apoyo (25) se articula libremente a un extremo del brazo oscilante (23); la mencionada posición inactiva retraída (R) del dispositivo estabilizador (361, 362) se define cuando el elemento tubular (30) está en la posición horizontal inactiva (J1), con el vástago deslizante (21) en la posición interior (V1) y el brazo oscilante (23) en la posición elevada (K1); la mencionada posición operativa extendida (L) del dispositivo estabilizador (361, 362) se define cuando el elemento tubular (30) está en la posición operativa inclinada (J2), con el vástago deslizante (21) en la posición exterior (V2) y el brazo oscilante (23) en la posición descendida (K2).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2011/000253.
Solicitante: C.M.C. S.r.l. - Società Unipersonale.
Nacionalidad solicitante: Italia.
Dirección: Via A. Vespucci 2 41013 Castelfranco Emilia (Modena) ITALIA.
Inventor/es: BORGHI, GIANNI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C23/80 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 23/00 Grúas que constan esencialmente de una viga, aguilón o una estructura triangular que actúan como brazo de palanca, montadas de forma que permitan movimientos de traslación o de orientación en planos verticales u horizontales, o bien una combinación de esos movimientos, p. ej. grúas de aguilón, derricks o grúas sobre torres (estructuras de torres que soportan la base B66C 5/00; adaptaciones de armazones que soportan las vías de rodadura B66C 6/00). › accionados hidráulicamente.
PDF original: ES-2477234_T3.pdf
Fragmento de la descripción:
Dispositivo estabilizador para una mïquina de trabajo.
La invenciïn se refiere al campo tïcnico que concierne a mïquinas de trabajo autopropulsadas, por ejemplo, del tipo de las que se utilizan en la industria de la construcciïn, la agricultura o similares.
Algunas materializaciones incluyen el equipamiento adecuado de un camiïn normal instalïndole el grupo operativo en su plataforma de carga, mientras que otras incluyen la construcciïn integral de un vehïculo, concebido con el propïsito de transportar un equipo en particular y para permitirle su mïxima funcionalidad operativa.
Para que el equipo diseïado opere con un vehïculo estacionario y por encima de determinada altura sobre el suelo, como un brazo elevador, para ambos tipos de mïquinas considerados existen dispositivos estabilizadores, como patas y similares, al mismo tiempo con la finalidad de:
- nivelar la mïquina en disposiciïn horizontal;
- neutralizar el movimiento de las suspensiones;
- incrementar, especialmente en la anchura, la base de apoyo en el suelo para contrarrestar el momento de vuelco.
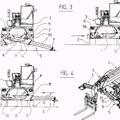
Las figs. 1, 2, 3 muestran, a modo de ejemplo, una mïquina de trabajo M del tipo integrado anteriormente mencionado, provista de un brazo elevador con un brazo telescïpico 1, al que se asocia un elemento de soporte en forma de horquilla 2. Un dispositivo asï se muestra en el documento FR 1465606.
Una torreta, dispuesta encima del bastidor 3 de la mïquina M, es hecha rotar por una quinta rueda 4 que tiene un eje vertical, y estï concebida para mover el brazo elevador 1 y la cabina del operador 5, que asï pueden rotar 360ï en cualquier direcciïn, sin soluciïn de continuidad (vïase en particular la fig. 3) .
La mïquina M estï provista de dos pares de dispositivos estabilizadores, un primer par 6A y un segundo par 6P, respectivamente asociados con el extremo delantero y trasero del bastidor 3, de manera transversal con respecto a ïste.
En cada par 6A, 6P, los dispositivos estabilizadores relacionados 61, 62 estïn dispuestos de manera simïtrica, de modo que los correspondientes pies de apoyo 71, 72 se orientan hacia fuera del bastidor 3, en direcciones opuestas respecto de la lïnea media de ïste.
Cada uno de dichos dispositivos estabilizadores 61, 62 incluye una barra fija 610, 620, dispuesta inclinada, desde ella, una barra extraïble 611, 621 sujeta a la acciïn de un primer gato hidrïulico 612, 622.
El pie de apoyo 71, 72 se asocia a un segundo gato hidrïulico 613, 623, fijado al extremo libre de la barra extraïble 611, 621.
Cuando dichos dispositivos estabilizadores 61, 62 estïn en condiciïn no operativa, durante el transporte en la carretera, las barras deslizables 611, 621 se mantienen dentro de las respectivas barras fijas 610, 620 y los pies 71, 72 se mantienen elevados, de modo que la dimensiïn transversal de cada par 6A, 6P permanece dentro del lïmite mïximo de tamaïo.
En la posiciïn operativa, mostrada en las figuras, las barras deslizables 611, 621 son extraïdas y los pies 71, 72 son bajados, de modo que las ruedas de la mïquina M se elevan del suelo.
La fig. 3 muestra la distancia longitudinal, indicada con X, entre dos dispositivos estabilizadores, del primer y segundo par 6A, 6P, respectivamente, en tanto que la distancia transversal entre los pies de apoyo 71, 72 de cada uno de los mismos pares 6A, 6P, se indica con Y.
La base de apoyo definida por los pies 71, 72 es, entonces, un rectïngulo, cuya longitud es igual a la distancia X y cuya anchura es igual a la distancia Y.
Como la distancia Y es considerablemente menor que la distancia X, la situaciïn de estabilidad menor ocurre cuando el brazo elevador 1 y, por consiguiente, la carga llevada por el elemento de soporte en forma de horquilla 2, estïn orientados transversalmente respecto del bastidor 3, como se ilustra en la fig. 2 y, parcialmente, en la fig. 3.
Por razones de seguridad comprensibles, la carga mïxima que puede ser llevada por el brazo elevador 1 se debe calcular en la condiciïn mïs desfavorable, para asï evitar que el vehïculo vuelque.
Por consiguiente, la distancia transversal limitada Y dada por los dispositivos estabilizadores conocidos penaliza las caracterïsticas operativas de la mïquina y, por consiguiente, los costes relacionados con su uso.
Por consiguiente, un objeto de la presente invenciïn es proponer un dispositivo estabilizador para una mïquina de trabajo, conformado de manera tal que, con una instalaciïn similar a la de los dispositivos estabilizadores conocidos, se logre un incremento en la anchura de la base de apoyo, para poder hacerla, como mïnimo, casi similar a su longitud.
Otro objeto de la invenciïn es proponer un dispositivo estabilizador capaz de cooperar eficientemente con otros dispositivos del equipo, para asï obtener la disposiciïn horizontal exacta de la mïquina de trabajo.
Otro objeto de la invenciïn se refiere a la intenciïn de proponer un dispositivo estabilizador fuerte, cuya operaciïn sea fiable y segura.
Las caracterïsticas de la invenciïn se aclaran con la siguiente descripciïn de las materializaciones preferentes del dispositivo estabilizador en discusiïn, de acuerdo con los contenidos de las reivindicaciones y con la ayuda de las figuras incluidas, en donde:
- la fig. 1 es una vista lateral esquemïtica de una mïquina de trabajo, provista de dispositivos estabilizadores conocidos en posiciïn operativa;
- la fig. 2 es una vista frontal de la mïquina de la fig. 1, con la torreta superior en una posiciïn diferente;
- la fig. 3 es una vista superior de la fig. 1 que muestra la rotaciïn de la torreta superior y las dimensiones de la base de apoyo;
- la fig. 4 es una vista lateral esquemïtica de una mïquina de trabajo, provista de los dispositivos estabilizadores en discusiïn, de acuerdo con una primera materializaciïn, en posiciïn operativa;
- la fig. 5 es una vista frontal de la mïquina de la fig. 4, con la torreta superior en una posiciïn diferente;
- la fig. 6 es una vista superior de la fig. 4 que muestra la rotaciïn de la torreta superior y las dimensiones de la base de apoyo;
- la fig. 7 es una vista esquemïtica frontal de un par de dispositivos estabilizadores como los de las figs. 4, 5, 6, en posiciïn de descanso;
- la fig. 8 es una vista similar a la de la fig. 7 con los dispositivos estabilizadores parcialmente quitados;
- la fig. 9 es una vista similar a la de la fig. 7 con los dispositivos estabilizadores totalmente quitados;
- la fig. 10 es una vista lateral esquemïtica de una mïquina de trabajo, provista de los dispositivos estabilizadores en discusiïn, de acuerdo con una segunda materializaciïn, en posiciïn operativa;
- la fig. 11 es una vista frontal de la mïquina de la fig. 10, con la torreta superior en una posiciïn diferente;
- la fig. 12 es una vista superior de la fig. 10 que muestra la rotaciïn de la torreta superior y las dimensiones de la base de apoyo;
- la fig. 13 es una vista esquemïtica frontal de un par de dispositivos estabilizadores como los de las figs. 10, 11, 12, en posiciïn de descanso;
- la fig. 14 es una vista similar a la de la fig. 13 con los dispositivos estabilizadores parcialmente quitados;
- la fig. 15 es una vista similar a la de la fig. 13 con los dispositivos estabilizadores totalmente quitados;
- la fig. 16 es una vista lateral esquemïtica de una mïquina de trabajo, provista de los dispositivos estabilizadores en discusiïn, de acuerdo con una versiïn constructiva de la segunda materializaciïn, en posiciïn operativa;
- la fig. 17 es una vista frontal de la mïquina de la fig. 16, con la torreta superior en una posiciïn diferente;
- la fig. 18 es una vista superior de la fig. 16 que muestra la rotaciïn de la torreta superior y las dimensiones de la base de apoyo;
- la fig. 19 es una vista esquemïtica frontal de un par de dispositivos estabilizadores como los de las figs. 16, 17, 18, en posiciïn de descanso;
- la fig. 20 es una vista similar a la de la fig. 19 con los dispositivos estabilizadores parcialmente quitados;
- la fig. 21 es una vista similar a la de la fig. 19 con los dispositivos estabilizadores totalmente quitados.
Con referencia a las figuras 1 a 3, se ha ilustrado una mïquina de trabajo M, provista de dispositivos estabilizadores del tipo conocido, mencionados en la nota introductoria.
De modo similar, para la descripciïn de la invenciïn en cuestiïn, se ha considerado una mïquina de trabajo M integrada idïntica, provista de un brazo elevador con un brazo telescïpico... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo estabilizador para una mïquina de trabajo, estando ïsta equipada con un bastidor (3) que presenta un primer y un segundo par de dispositivos estabilizadores (6A, 6P) montados respectivamente en los extremos frontal y trasero, en cada par de dispositivos estabilizadores, los dispositivos estabilizadores estïn dispuestos de manera simïtrica y transversal al bastidor (3) , de modo que los correspondientes pies de apoyo se orientan hacia fuera, en direcciones opuestas respecto de la lïnea longitudinal media del bastidor, dichos pares de dispositivos estabilizadores (6A, 6P) estïn concebidos para que, al estar en posiciïn operativa, definan una base de apoyo con una longitud (X) igual a la distancia longitudinal entre los mismos pares de dispositivos estabilizadores (6A, 6P) , y con una anchura (Y) igual a la distancia transversal entre los pies de apoyo de cada uno de los mismos pares de dispositivos estabilizadores, cada uno de los dispositivos estabilizadores (161, 162, 261, 262, 361, 362) comprende, como mïnimo, un primer y un segundo mïdulo (10, 11) , interconectados entre sï, uno de los cuales estï provisto de dispositivo de elongaciïn lineal (12) , mientras que el otro estï provisto de dispositivo de elongaciïn a compïs (13) , los mencionados dispositivos de elongaciïn lineal (12) y a compïs (13) estïn adaptados para ser operados en relaciïn de fase para definir una posiciïn inactiva retraïda (R) , en la que el correspondiente pie de apoyo (19, 25) estï elevado del suelo y el bulto de dicho dispositivo estabilizador (161, 162, 261, 262, 361, 362) estï dentro de los lïmites de tamaïo mïximos de la mencionada mïquina (M) , y una posiciïn operativa extendida (L) , en la que el pie de apoyo (19, 25) se pone en contacto con el suelo a una distancia predeterminada de la lïnea media longitudinal, caracterizado porque: el primer mïdulo (10) estï equipado con el dispositivo lineal de elongaciïn (12) e incluye un elemento tubular (30) concebido para sostener y guiar un vïstago deslizante (21) operado por un primer actuador relevante (22) entre una posiciïn interior (V1) y una posiciïn exterior (V2) ; el elemento tubular (30) es llevado de modo oscilante por una placa vertical transversal al bastidor (3) de la mïquina (M) y estï sometido a la acciïn de un dispositivo de fuerza (31) concebido para definir, para el mismo elemento tubular (30) , una posiciïn inactiva horizontal (J1) y una posiciïn operativa inclinada (J2) ; el segundo mïdulo (11) se asocia al vïstago deslizante (21) , estando equipado con el dispositivo de elongaciïn a compïs (13) e incluye un brazo oscilante (23) , articulado a un extremo exterior del vïstago deslizante (21) y operado por un segundo actuador relevante (24) entre una posiciïn elevada (K1) y una posiciïn descendida (K2) ; el pie de apoyo (25) se articula libremente a un extremo del brazo oscilante (23) ; la mencionada posiciïn inactiva retraïda (R) del dispositivo estabilizador (361, 362) se define cuando el elemento tubular (30) estï en la posiciïn horizontal inactiva (J1) , con el vïstago deslizante (21) en la posiciïn interior (V1) y el brazo oscilante (23) en la posiciïn elevada (K1) ; la mencionada posiciïn operativa extendida (L) del dispositivo estabilizador (361, 362) se define cuando el elemento tubular (30) estï en la posiciïn operativa inclinada (J2) , con el vïstago deslizante (21) en la posiciïn exterior (V2) y el brazo oscilante (23) en la posiciïn descendida (K2) .
2. Un dispositivo estabilizador, segïn la reivindicaciïn 1, caracterizado porque la medida de la anchura (Y) de la base de apoyo es aproximadamente igual o mayor que la medida de la longitud (X) .
3. Un dispositivo estabilizador, segïn la reivindicaciïn 1 o 2, caracterizado porque el primer mïdulo (10) estï equipado con el dispositivo de elongaciïn a compïs (13) e incluye una placa vertical estacionaria (14) , dispuesta de manera transversal al bastidor (3) de la mïquina (M) y adonde estï articulado un brazo (15) , de modo que oscile desde una posiciïn elevada (H1) hacia una posiciïn descendida (H2) debido a la operaciïn del respectivo primer actuador (16) ; el segundo mïdulo (11) estï asociado al brazo (15) , y estï equipado con el dispositivo de elongaciïn lineal (12) e incluye un elemento deslizable (17) , soportado coaxialmente por el mismo brazo (15) y operado por un respectivo segundo actuador (18) , entre una posiciïn interior (W1) y una posiciïn exterior (W2) ; el pie de apoyo (19) estï libremente articulado al extremo del elemento deslizable (17) ; la mencionada posiciïn inactiva retraïda (R) del dispositivo estabilizador (161, 162) se define cuando el brazo (15) estï en la posiciïn elevada (H1) y el elemento deslizable (17) estï en la posiciïn interior (W1) ; la mencionada posiciïn operativa extendida (L) del dispositivo estabilizador (161, 162) se define cuando el brazo (15) estï en la posiciïn descendida (H2) y el elemento deslizable
(17) estï en la posiciïn exterior (W2) .
4. Un dispositivo estabilizador, segïn la reivindicaciïn 1 o 2, caracterizado porque el primer mïdulo (10) estï equipado con el dispositivo lineal de elongaciïn (12) e incluye un elemento tubular estacionario (20) concebido para sostener y guiar un vïstago deslizante (21) operado por un primer actuador relevante (22) entre una posiciïn interior (V1) y una posiciïn exterior (V2) ; el segundo mïdulo (11) se asocia al vïstago deslizante (21) , estï equipado con el dispositivo de elongaciïn a compïs (13) e incluye un brazo oscilante (23) , articulado a un extremo exterior del vïstago deslizante (21) y operado por un segundo actuador relevante (24) entre una posiciïn elevada (K1) y una posiciïn descendida (K2) ; el pie de apoyo (25) se articula libremente al extremo del brazo oscilante (23) ; la mencionada posiciïn inactiva retraïda (R) del dispositivo estabilizador (261, 262) se define cuando el vïstago deslizante (21) estï en la posiciïn interior (V1) y el brazo oscilante (23) estï en la posiciïn elevada (K1) ; la mencionada posiciïn operativa extendida (L) del dispositivo estabilizador (261, 262) se define cuando el vïstago deslizante (21) estï en la posiciïn exterior (V2) y el brazo oscilante (23) estï en la posiciïn descendida (K2) .
5. Un dispositivo estabilizador, segïn la reivindicaciïn 4, caracterizado porque el elemento tubular estacionario (20) estï inclinado con respecto a un plano horizontal.
Patentes similares o relacionadas:
Sistema de estabilización de máquinas de explotación automotrices, del 18 de Marzo de 2020, de Manitou Italia S.r.l: Un método para controlar estabilizadores de tijera de máquinas de explotación automotrices, tales como manipuladores telescópicos o similares, […]
Torno de pozo móvil, del 13 de Noviembre de 2019, de OLKO-Maschinentechnik GmbH: Torno de pozo móvil , que comprende - un vehículo transportador con un accionamiento de vehículo , que presenta un motor de combustión […]
Torno de pozo móvil, del 6 de Noviembre de 2019, de OLKO-Maschinentechnik GmbH: Torno de pozo móvil , que comprende - un vehículo transportador con un accionamiento de vehículo , que presenta un motor de combustión […]
Procedimiento y dispositivo de vigilancia de apoyo para carro que comprende un medio estabilizador, del 5 de Noviembre de 2019, de MANITOU BF: Procedimiento de vigilancia de apoyo para carro que comprende un medio estabilizador, caracterizado por que el mencionado procedimiento comprende las etapas: - de bajada […]
Dispositivo de apoyo para un vehículo, del 24 de Julio de 2019, de PALFINGER AG: Dispositivo de apoyo telescópico hidráulico para un vehículo , en particular para una grúa de carga transportable con: […]
Vehículo utilitario con sistema de elevación y medios de estabilización, del 16 de Noviembre de 2016, de IVECO MAGIRUS AG: Vehículo utilitario, en particular un vehículo contraincendios, que comprende un aparato aéreo extensible tal como una escalera giratoria y/o una plataforma […]
Dispositivo de seguridad para una grúa, del 5 de Octubre de 2016, de PALFINGER AG: Dispositivo para asegurar la posición de una grúa con al menos dos patas de apoyo para el apoyo en superficies, en el que se introduce al menos […]
 Carretilla elevadora equipada con medios de estabilización, del 10 de Febrero de 2016, de C.M.C. S.r.l. - Società Unipersonale: Una carretilla elevadora equipada con medios de estabilización para apoyarse sobre el suelo que incluye un chasis móvil sobre ruedas […]
Carretilla elevadora equipada con medios de estabilización, del 10 de Febrero de 2016, de C.M.C. S.r.l. - Società Unipersonale: Una carretilla elevadora equipada con medios de estabilización para apoyarse sobre el suelo que incluye un chasis móvil sobre ruedas […]